
含变刚度膝关节的仿人机器腿设计与研究的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

含变刚度膝关节的仿人机器腿设计与研究的开题报告.docx
含变刚度膝关节的仿人机器腿设计与研究的开题报告一、选题背景随着人类社会的科技进步和经济发展,机器人已成为现代工业生产和科学研究的基础设施之一。在机器人应用领域,机器腿也是研究的热点之一。仿人机器腿的设计和研究是机器人学和生物机械学研究的重要分支。它的研究理论以人体运动、神经、生理学和力学为基础。机器腿不仅可以用于工业制造,还可以应用在人工肢体、探测器和机器人等领域。传统的仿人机器腿大多采用电机驱动或液压驱动的方式,关节刚度较高,难以实现人体运动的柔韧性。为了更好地模拟人类下肢,一些学者已经开始将仿生学原理

变刚度仿蛇机器人机构设计与柔顺控制研究的开题报告.docx
变刚度仿蛇机器人机构设计与柔顺控制研究的开题报告一、选题背景随着机器人技术的发展,机器人已经广泛应用于工业生产、医疗、教育、军事等领域。仿生机器人作为一种新型的机器人,以其类人化的外观和功能,在工业生产、服务机器人、医疗等领域得到了广泛的应用和研究。现在,仿生机器人中蛇形机器人的应用越来越广泛,由于其拥有良好的柔性,可以应用于复杂空间环境中的探测和任务执行,比如搜索救援、海底勘探、管道检查等。蛇形机器人的外形、运动方式以及柔性控制均模仿自然界的蛇,所以可以通过在蛇形机器人身体的不同部位进行控制,来实现蛇形

基于气缸的仿人变刚度关节设计与控制研究.docx
基于气缸的仿人变刚度关节设计与控制研究标题:基于气缸的仿人变刚度关节设计与控制研究摘要:随着机器人技术的不断发展,仿真人机器人的研究逐渐成为热门领域。在仿真人机器人中,关节的设计和控制是十分重要的一环。本文以基于气缸的仿人变刚度关节为研究对象,结合具体的设计与控制方法,探索了一种新颖的仿人变刚度关节设计方案。关键词:仿人机器人、变刚度关节、气缸、设计、控制1.引言人类关节具有非常复杂的运动特征,并且能够根据外部环境的变化调节关节的刚度。这种能力使得人类能够灵活地适应不同的任务和环境。因此,仿人机器人中关节

面向微创手术的连续机器人变刚度研究的开题报告.docx
面向微创手术的连续机器人变刚度研究的开题报告一、选题背景随着微创手术的广泛应用,连续机器人在微创手术领域的应用越来越受到关注。在连续机器人中,机器人的柔性和变形能代替手术器械的灵活操作,从而减少人工操作的误差和对患者的伤害,提高手术成功率。但在实际应用中,连续机器人的柔性和变形会导致手术效果的不稳定性,如手术器械的位移、抖动和误差等问题,因此如何优化连续机器人的控制策略和变刚度成为了当前微创手术领域研究的热点。二、选题意义随着微创手术的发展,不断有新的手术方法和手术器械被开发出来,要求医生对于手术器械的操
仿人肘关节型机器人变刚度关节.pdf
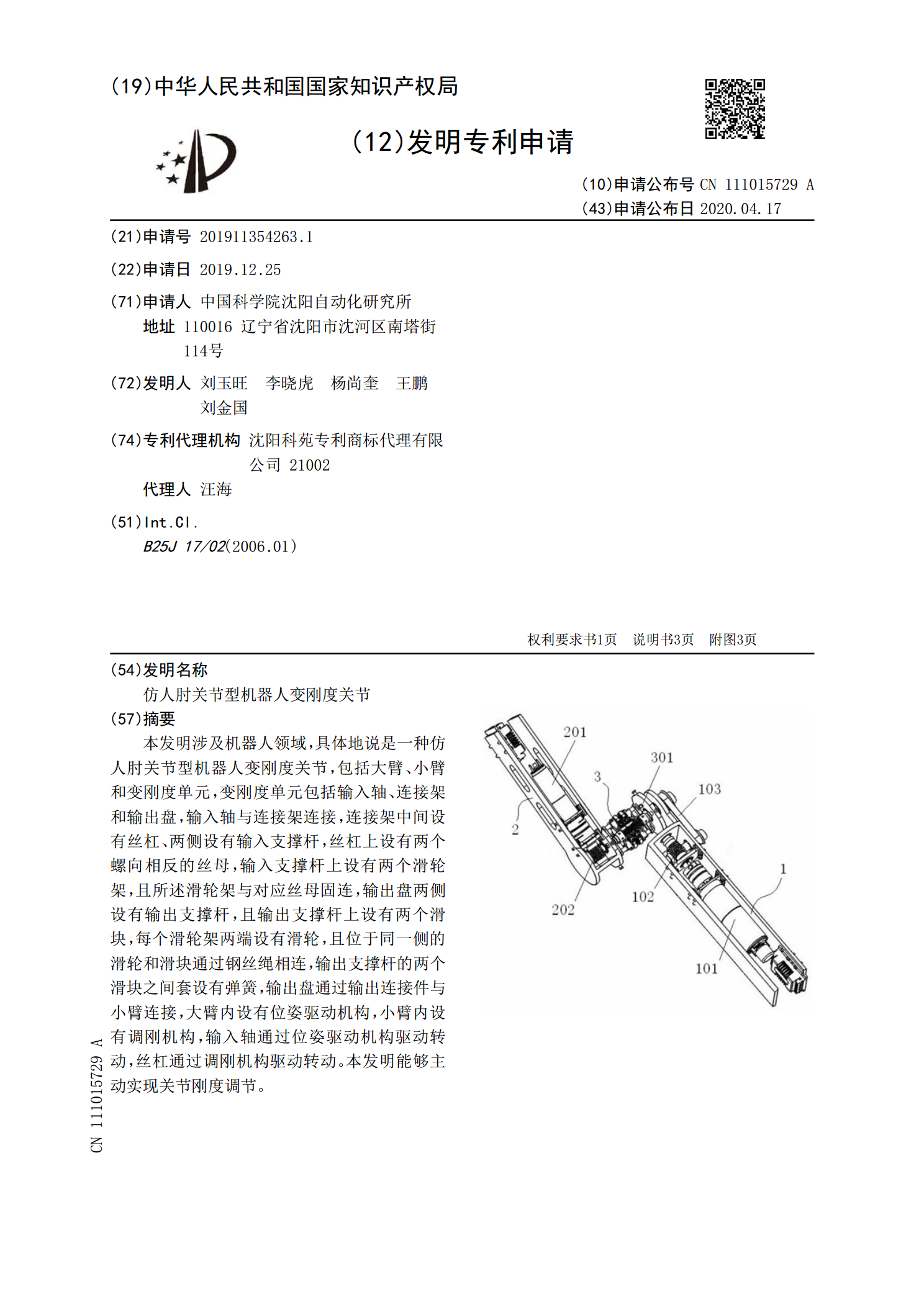
本发明涉及机器人领域,具体地说是一种仿人肘关节型机器人变刚度关节,包括大臂、小臂和变刚度单元,变刚度单元包括输入轴、连接架和输出盘,输入轴与连接架连接,连接架中间设有丝杠、两侧设有输入支撑杆,丝杠上设有两个螺向相反的丝母,输入支撑杆上设有两个滑轮架,且所述滑轮架与对应丝母固连,输出盘两侧设有输出支撑杆,且输出支撑杆上设有两个滑块,每个滑轮架两端设有滑轮,且位于同一侧的滑轮和滑块通过钢丝绳相连,输出支撑杆的两个滑块之间套设有弹簧,输出盘通过输出连接件与小臂连接,大臂内设有位姿驱动机构,小臂内设有调刚机构,输