
无人艇航行控制与集群避障方法研究的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

无人艇航行控制与集群避障方法研究.docx
无人艇航行控制与集群避障方法研究无人艇航行控制与集群避障方法研究摘要:无人艇作为一种具有广泛应用前景的航行器,其良好的操控和集群避障能力越来越受到研究者的关注。本文基于无人艇的控制和集群避障技术,对相关研究进行了综述和分析,总结了无人艇航行控制和集群避障的方法,探讨了未来的研究方向和发展趋势。关键词:无人艇,航行控制,集群避障引言:随着无人机技术的发展,无人艇作为一种类似无人机的无人航行器,具有广泛的应用前景。无人艇不仅可以用于海上巡航、救援和科学研究等领域,还可以应用于海洋资源勘探和环境保护等方面。然而

无人艇航行控制与集群避障方法研究的任务书.docx
无人艇航行控制与集群避障方法研究的任务书任务书:无人艇航行控制与集群避障方法研究1.项目背景随着科技的不断发展和进步,无人智能系统越来越被广泛应用。其中,无人艇的应用领域也越来越广泛,如水面监测、河道巡逻、海岸巡逻、海洋调查、海洋资源勘探、海洋物流、水上紧急救援等领域。而无人艇在执行任务时,智能化程度越高,其执行效率和精准度也越高。本项目旨在通过探索和研究无人艇在航行控制和集群避障方面的方法,使其在实际应用中能够更加灵活、高效地完成任务,提高其自主化和智能化程度。2.项目目标本项目的主要目标包括:(1)研
无人机避障方法及系统、无人机集群避障方法及系统.pdf
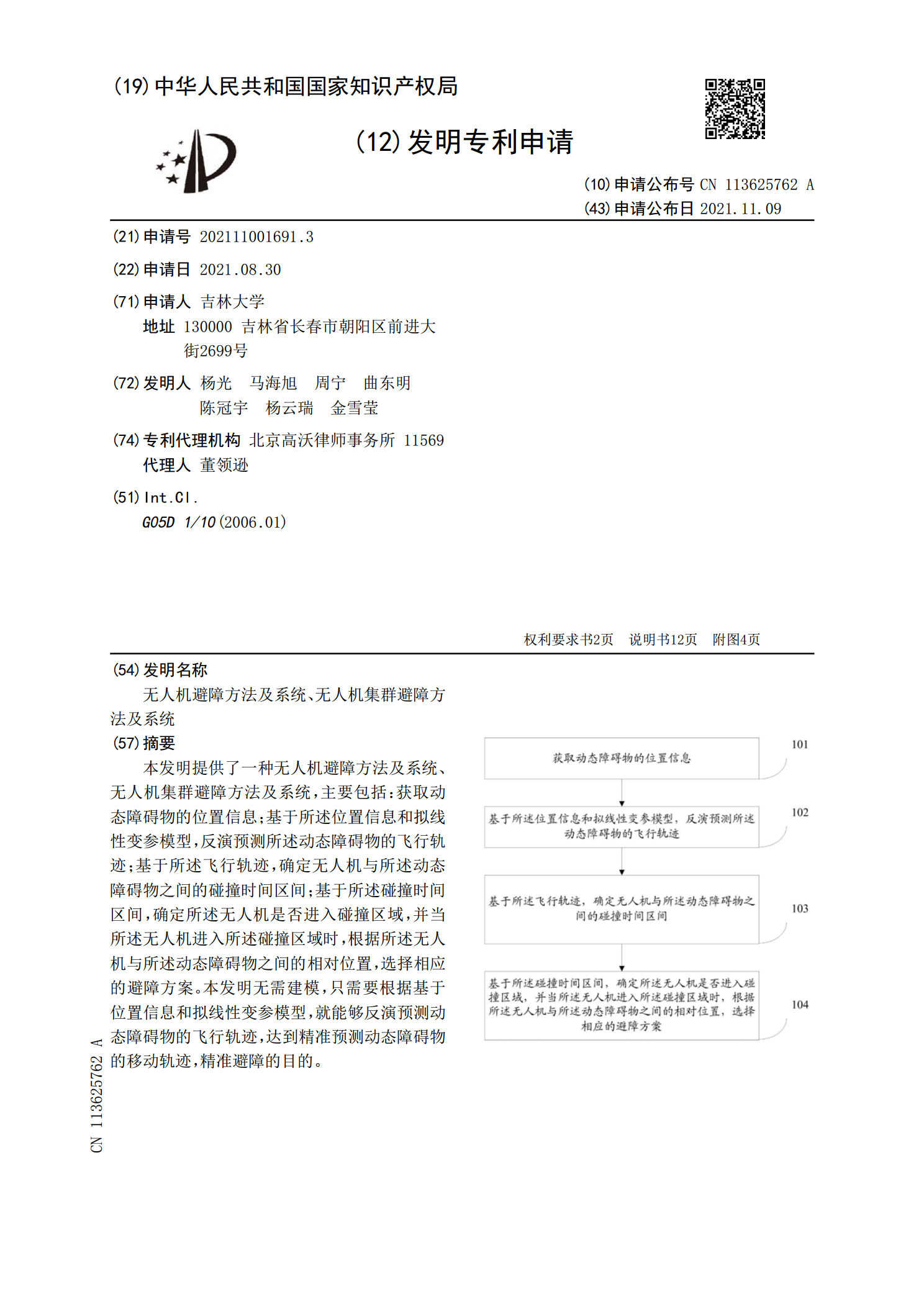
本发明提供了一种无人机避障方法及系统、无人机集群避障方法及系统,主要包括:获取动态障碍物的位置信息;基于所述位置信息和拟线性变参模型,反演预测所述动态障碍物的飞行轨迹;基于所述飞行轨迹,确定无人机与所述动态障碍物之间的碰撞时间区间;基于所述碰撞时间区间,确定所述无人机是否进入碰撞区域,并当所述无人机进入所述碰撞区域时,根据所述无人机与所述动态障碍物之间的相对位置,选择相应的避障方案。本发明无需建模,只需要根据基于位置信息和拟线性变参模型,就能够反演预测动态障碍物的飞行轨迹,达到精准预测动态障碍物的移动轨迹
一种无人机与无人艇结合的导航避障方法.pdf
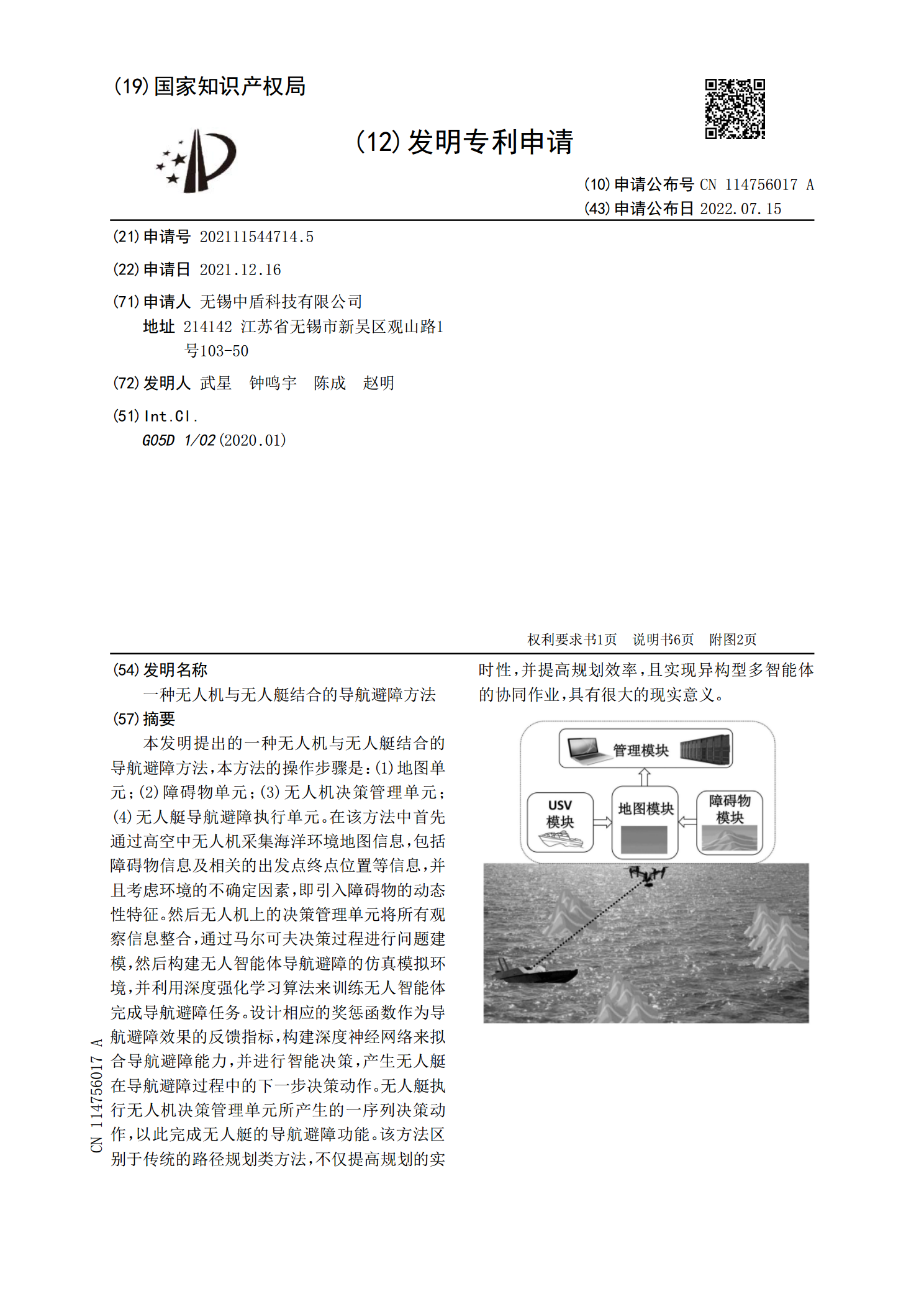
本发明提出的一种无人机与无人艇结合的导航避障方法,本方法的操作步骤是:(1)地图单元;(2)障碍物单元;(3)无人机决策管理单元;(4)无人艇导航避障执行单元。在该方法中首先通过高空中无人机采集海洋环境地图信息,包括障碍物信息及相关的出发点终点位置等信息,并且考虑环境的不确定因素,即引入障碍物的动态性特征。然后无人机上的决策管理单元将所有观察信息整合,通过马尔可夫决策过程进行问题建模,然后构建无人智能体导航避障的仿真模拟环境,并利用深度强化学习算法来训练无人智能体完成导航避障任务。设计相应的奖惩函数作为导

无人艇的喷水推进与航行控制设计研究的任务书.docx
无人艇的喷水推进与航行控制设计研究的任务书任务书一、任务目标本研究旨在探讨无人艇喷水推进与航行控制设计,主要包括以下任务:1.设计并实现喷水推进装置,确保推进效率高、船体稳定性好,能够满足无人艇在不同水域环境下的推进需求。2.针对无人艇的特殊控制需求,设计船体控制系统,实现无人艇的自主导航和避撞等基本控制功能。3.开发船舶控制软件,提供简单易用的操作界面,方便用户掌握无人艇的控制。4.进行实验验证,测试所设计的喷水推进和船体控制系统的性能,并针对实验结果进行分析、调整和优化。二、任务背景伴随着全球经济的发