
一种无人机与无人艇结合的导航避障方法.pdf

Jo****31

1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种无人机与无人艇结合的导航避障方法.pdf
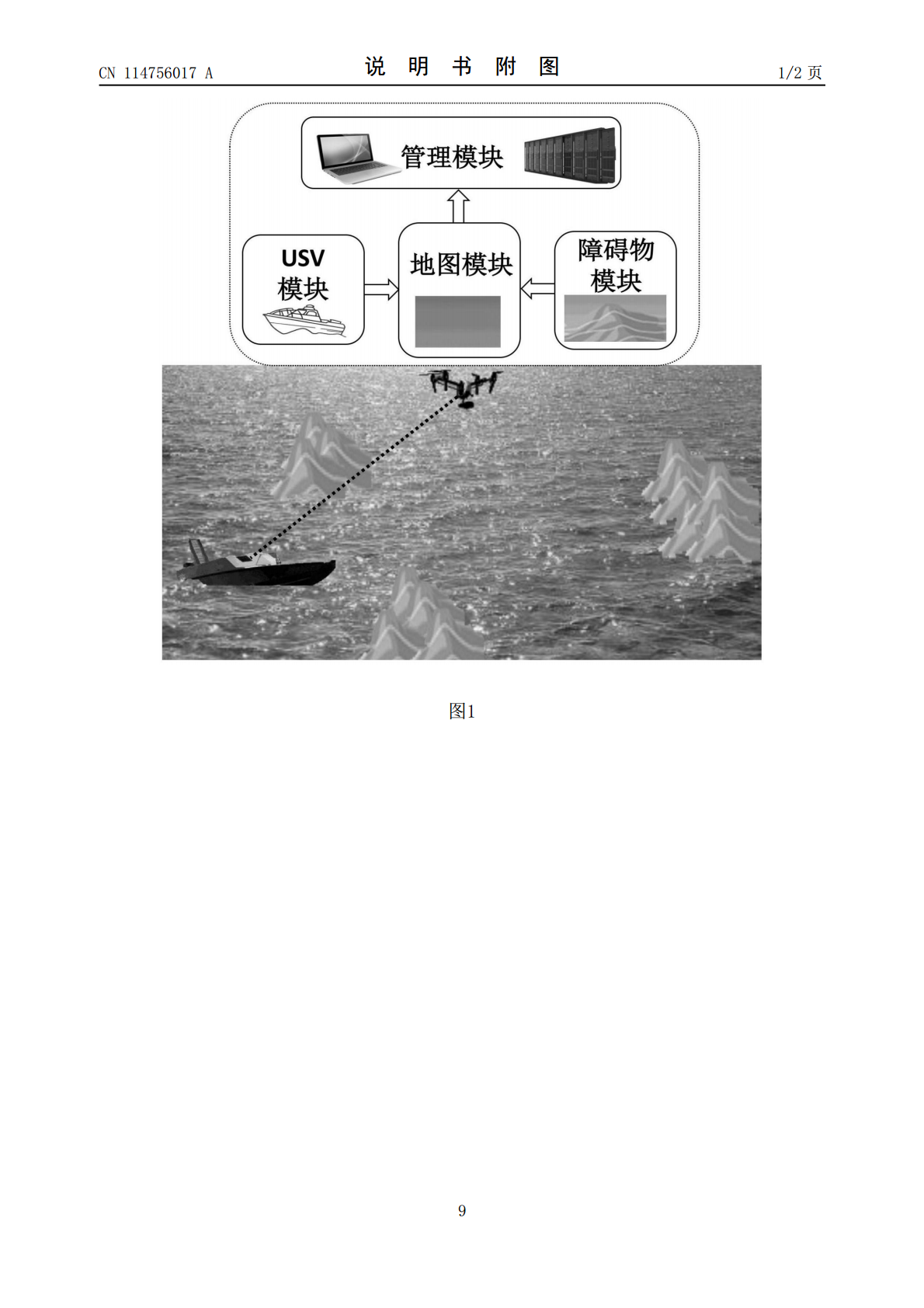
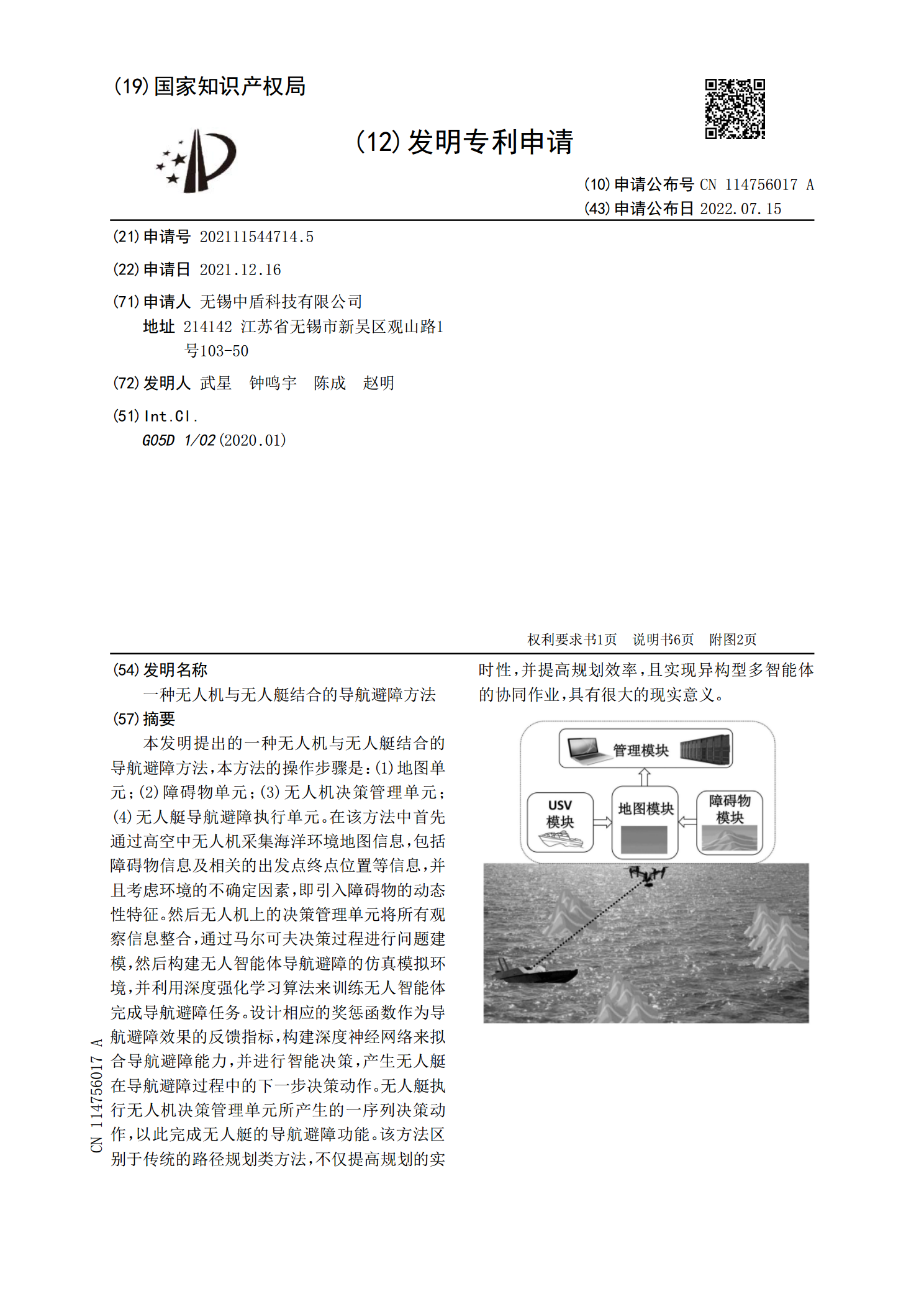
本发明提出的一种无人机与无人艇结合的导航避障方法,本方法的操作步骤是:(1)地图单元;(2)障碍物单元;(3)无人机决策管理单元;(4)无人艇导航避障执行单元。在该方法中首先通过高空中无人机采集海洋环境地图信息,包括障碍物信息及相关的出发点终点位置等信息,并且考虑环境的不确定因素,即引入障碍物的动态性特征。然后无人机上的决策管理单元将所有观察信息整合,通过马尔可夫决策过程进行问题建模,然后构建无人智能体导航避障的仿真模拟环境,并利用深度强化学习算法来训练无人智能体完成导航避障任务。设计相应的奖惩函数作为导
一种无人机避障系统及避障方法.pdf
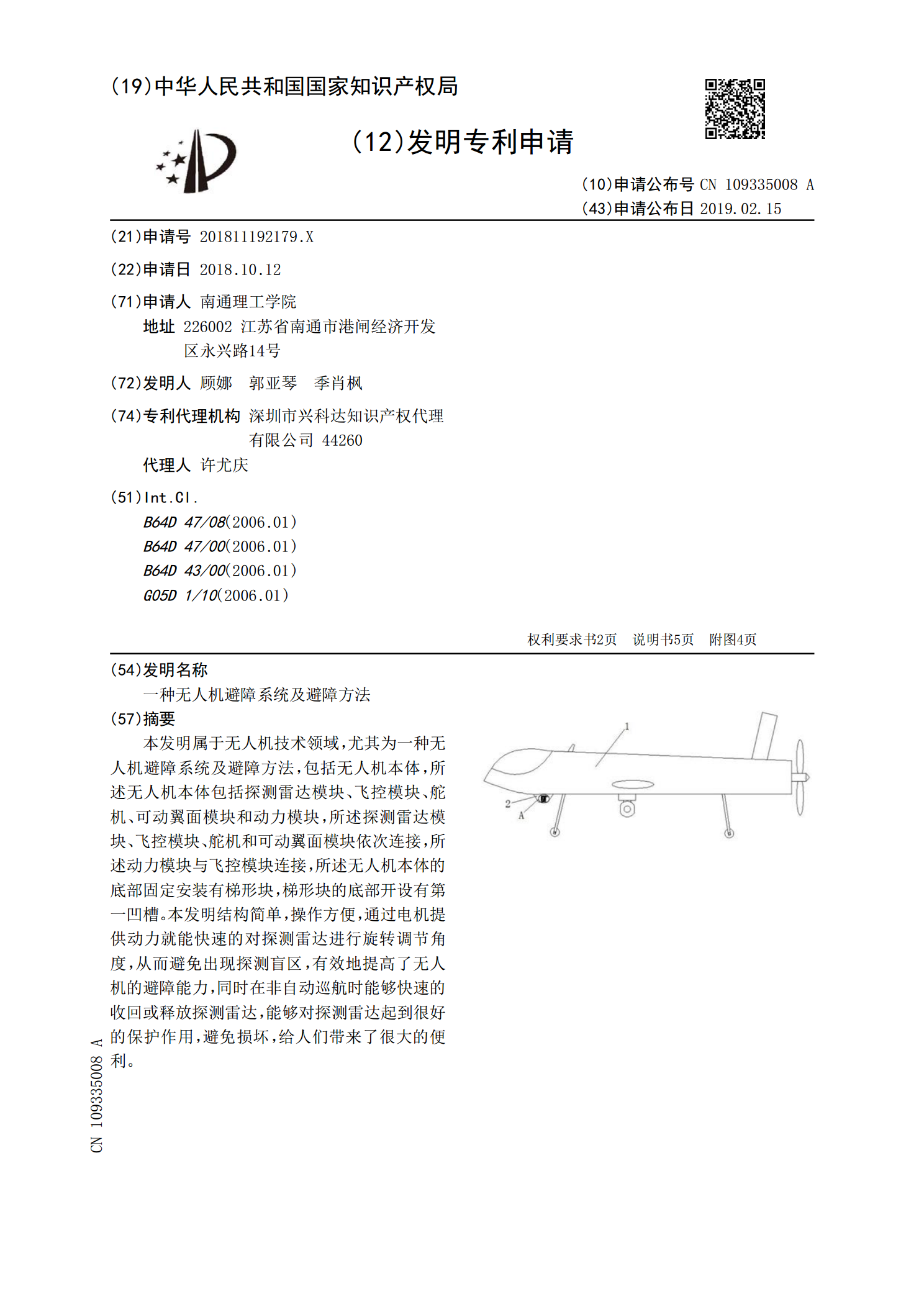
本发明属于无人机技术领域,尤其为一种无人机避障系统及避障方法,包括无人机本体,所述无人机本体包括探测雷达模块、飞控模块、舵机、可动翼面模块和动力模块,所述探测雷达模块、飞控模块、舵机和可动翼面模块依次连接,所述动力模块与飞控模块连接,所述无人机本体的底部固定安装有梯形块,梯形块的底部开设有第一凹槽。本发明结构简单,操作方便,通过电机提供动力就能快速的对探测雷达进行旋转调节角度,从而避免出现探测盲区,有效地提高了无人机的避障能力,同时在非自动巡航时能够快速的收回或释放探测雷达,能够对探测雷达起到很好的保护作
无人机避障方法及系统、无人机集群避障方法及系统.pdf
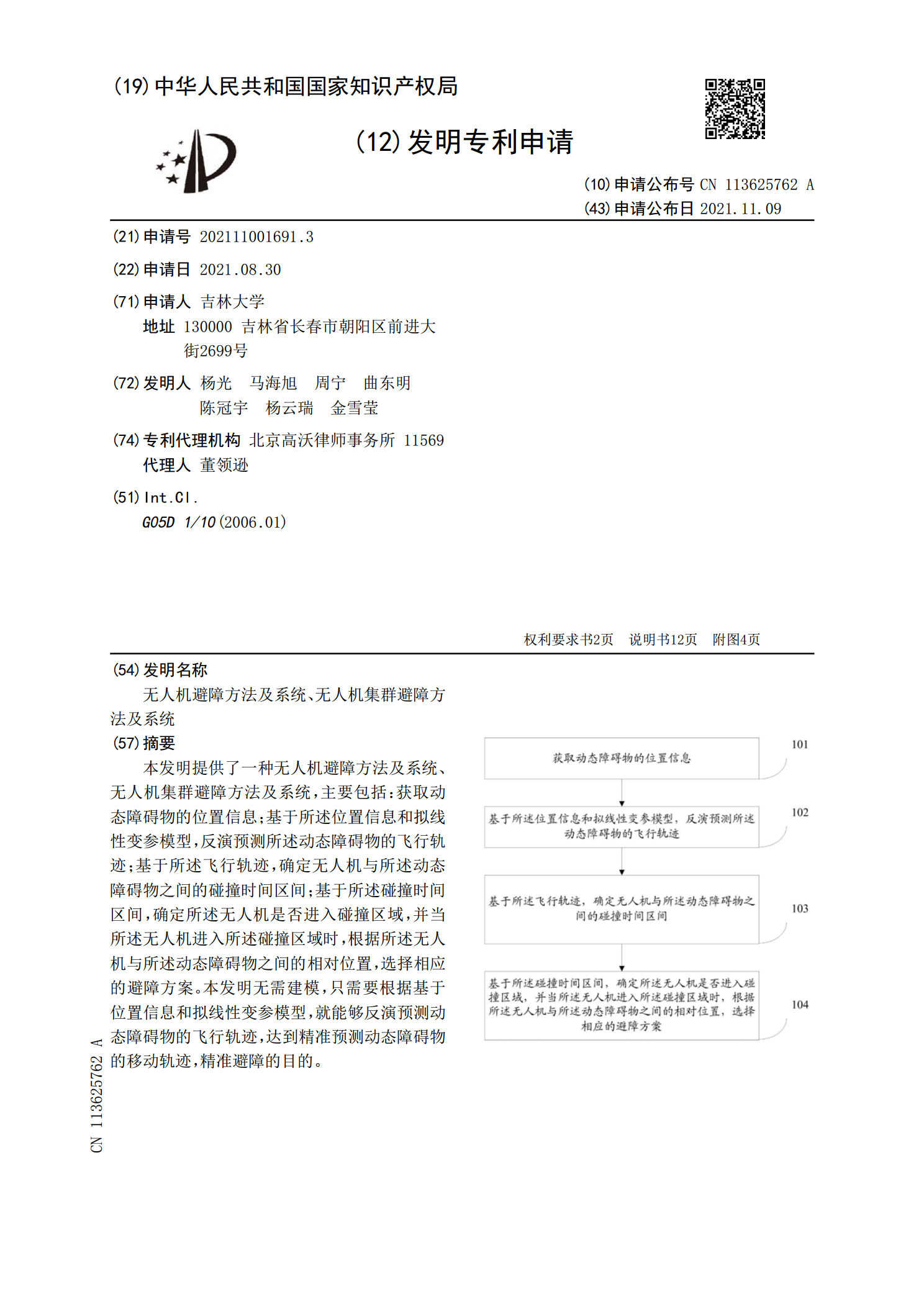
本发明提供了一种无人机避障方法及系统、无人机集群避障方法及系统,主要包括:获取动态障碍物的位置信息;基于所述位置信息和拟线性变参模型,反演预测所述动态障碍物的飞行轨迹;基于所述飞行轨迹,确定无人机与所述动态障碍物之间的碰撞时间区间;基于所述碰撞时间区间,确定所述无人机是否进入碰撞区域,并当所述无人机进入所述碰撞区域时,根据所述无人机与所述动态障碍物之间的相对位置,选择相应的避障方案。本发明无需建模,只需要根据基于位置信息和拟线性变参模型,就能够反演预测动态障碍物的飞行轨迹,达到精准预测动态障碍物的移动轨迹

一种无人机避障方法及无人机.pdf
本发明实施例公开了一种无人机避障方法以及无人机。该无人机避障方法,包括:驱动单线激光雷达相对无人机进行周期转动并扫描,获得所述单线激光雷达在每一转动角度下反馈的点云数据,所述单线激光雷达的转动方向与扫描方向相交;对每一转动角度下的所述点云数据中的干扰点云数据进行预处理,保留有效点云数据;将所述有效点云数据进行排序,获得距离无人机最近的目标点云数据;依据距离无人机最近的目标点云数据进行避障处理。本发明实施例解决了现有单线激光雷达在无人机避障应用中的局限性,在保留单线激光雷达的低成本和轻载荷的优点的同时,实现

一种无人机避障方法.pdf
本发明提供一种无人机避障方法,包括:S1、确定障碍物的类型;S2、判断障碍物的类型是否为移动障碍物;若是执行步骤S3;若否执行步骤S5;S3、获取移动障碍物的移动轨迹;S4、确定移动障碍物的移动轨迹的终点的位置信息是否处于安全降落区域内;若否执行步骤S7;若是执行步骤S8;S5、获取静止障碍物的轮廓点和轮廓点对应的位置信息;S6、判断各个轮廓点对应的位置信息是否均处于安全降落区域外;若是执行步骤S7;若否执行步骤S8;S7、根据起升点的位置信息生成控制指令并发送至无人机,以降落至落地点;S8、设定新的降落