
机器人抓取运动目标的轨迹规划方法.pdf

努力****承悦


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
机器人抓取运动目标的轨迹规划方法.pdf
机器人运动规划方法、路径规划方法、抓取方法及其装置.pdf
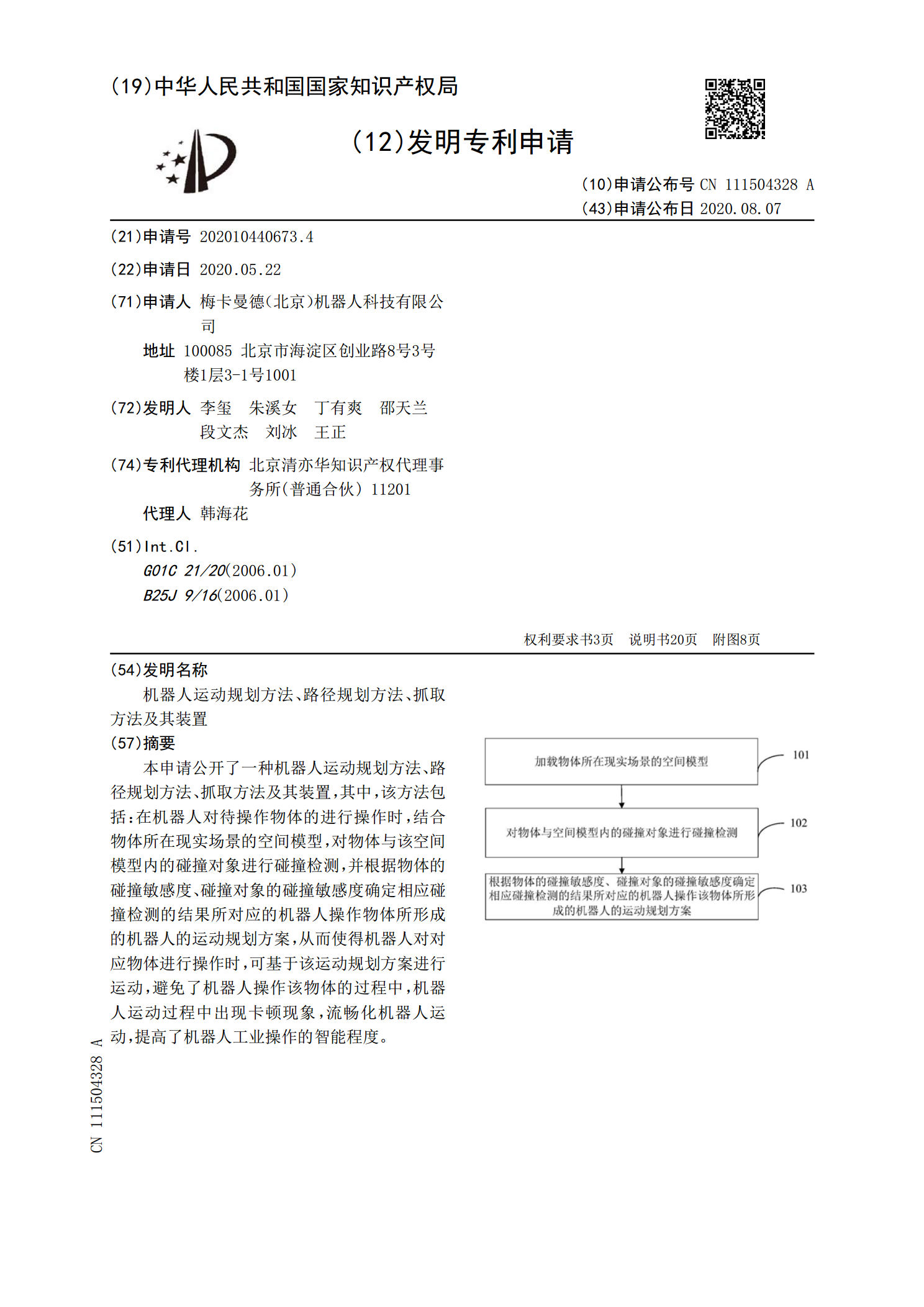
本申请公开了一种机器人运动规划方法、路径规划方法、抓取方法及其装置,其中,该方法包括:在机器人对待操作物体的进行操作时,结合物体所在现实场景的空间模型,对物体与该空间模型内的碰撞对象进行碰撞检测,并根据物体的碰撞敏感度、碰撞对象的碰撞敏感度确定相应碰撞检测的结果所对应的机器人操作物体所形成的机器人的运动规划方案,从而使得机器人对对应物体进行操作时,可基于该运动规划方案进行运动,避免了机器人操作该物体的过程中,机器人运动过程中出现卡顿现象,流畅化机器人运动,提高了机器人工业操作的智能程度。

工业机器人抓取策略及运动规划方法研究.docx
工业机器人抓取策略及运动规划方法研究工业机器人抓取策略及运动规划方法研究摘要:随着工业机器人应用的广泛推广,机器人抓取技术的研究和发展变得尤为重要。本文旨在探讨工业机器人抓取策略及运动规划方法的研究进展,并提出了一种基于视觉感知的抓取策略与运动规划方法。通过实验验证,该方法在工业机器人抓取任务中具有较高的效果和鲁棒性。1.引言工业机器人是一种重要的自动化装备,广泛应用于现代工业生产中,其主要作用是完成重复性、繁琐、危险的工作任务。机器人的抓取技术是机器人实现自主操作和准确处理对象的关键技术之一。因此,深入

人手抓取运动轨迹研究.docx
人手抓取运动轨迹研究运动轨迹研究是运动学、运动生理学、运动心理学等多个领域的重要研究内容。在各个领域中,研究者们不断尝试采用多种手段来获取和分析运动轨迹数据,以深入了解运动动作特征、运动能力水平、运动偏好等方面的内容。然而,随着科技的不断发展,人们也逐渐开始尝试用计算机技术来自动化地获取和分析运动轨迹数据,这也极大地促进了运动轨迹研究的发展。然而需要说明的是,人手抓取运动轨迹数据在人机交互领域中仍然具有很高的研究价值和应用价值。这主要表现在:一、人手抓取可以确保数据的准确性和可靠性。无论是获得运动者的实际

柔索驱动拣矸机器人抓取轨迹规划研究.docx
柔索驱动拣矸机器人抓取轨迹规划研究摘要本文研究了基于柔索驱动技术的拣矸机器人抓取轨迹规划问题。针对传统的机械臂抓取方式存在的局限性,提出了基于柔索驱动技术的拣矸机器人,并在此基础上研究了抓取轨迹规划算法。通过对机器人的系统建模和仿真实验,验证了所提出算法的有效性和可行性。论文的研究成果对于加强工业机器人的抓取能力,提高拣选效率具有重要意义。关键词:拣矸机器人,柔索驱动,抓取轨迹规划,系统建模,仿真实验一、引言随着工业自动化的发展,工业机器人已经成为工业生产的重要力量。拣矸机器人作为一种特殊的工业机器人,在