
柔索驱动拣矸机器人抓取轨迹规划研究.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

柔索驱动拣矸机器人抓取轨迹规划研究.docx
柔索驱动拣矸机器人抓取轨迹规划研究摘要本文研究了基于柔索驱动技术的拣矸机器人抓取轨迹规划问题。针对传统的机械臂抓取方式存在的局限性,提出了基于柔索驱动技术的拣矸机器人,并在此基础上研究了抓取轨迹规划算法。通过对机器人的系统建模和仿真实验,验证了所提出算法的有效性和可行性。论文的研究成果对于加强工业机器人的抓取能力,提高拣选效率具有重要意义。关键词:拣矸机器人,柔索驱动,抓取轨迹规划,系统建模,仿真实验一、引言随着工业自动化的发展,工业机器人已经成为工业生产的重要力量。拣矸机器人作为一种特殊的工业机器人,在

基于比例导引法的机械臂拣矸过程轨迹规划方法研究.docx
基于比例导引法的机械臂拣矸过程轨迹规划方法研究基于比例导引法的机械臂拣矸过程轨迹规划方法研究摘要:机械臂在矿石拣选、垃圾处理等领域具有广泛应用。本文针对机械臂在矿石拣矸过程中的轨迹规划问题,提出了一种基于比例导引法的轨迹规划方法。通过分析机械臂拣矸过程的特点,建立了机械臂物体检测模型和轨迹生成模型。基于比例导引法,通过调整比例控制参数,实现了机械臂的自适应轨迹规划。实验结果表明,该方法能够有效提高机械臂拣矸过程的准确性和效率,具有较好的应用前景。关键词:机械臂拣矸;轨迹规划;比例导引法;物体检测;自适应控

柔索驱动并联加工机器人的设计与特性研究的中期报告.docx
柔索驱动并联加工机器人的设计与特性研究的中期报告中期报告内容:一、研究背景与研究目标随着工业化的飞速发展,制造业越来越需要自动化生产,机器人处于快速发展的阶段,具有操作简单、生产效率高、产品质量好等优点,因此机器人在制造业的应用越来越广泛。本项目旨在开发一种柔索驱动并联加工机器人,以满足生产效率提高、生产成本降低、产品质量提高的需求。二、研究内容与方案1.研究内容(1)柔索驱动机器人的构建(2)柔索驱动机器人的控制系统分析(3)不同工况下机器人运动学特性分析(4)基于柔索驱动机器人的加工实验研究2.研究方
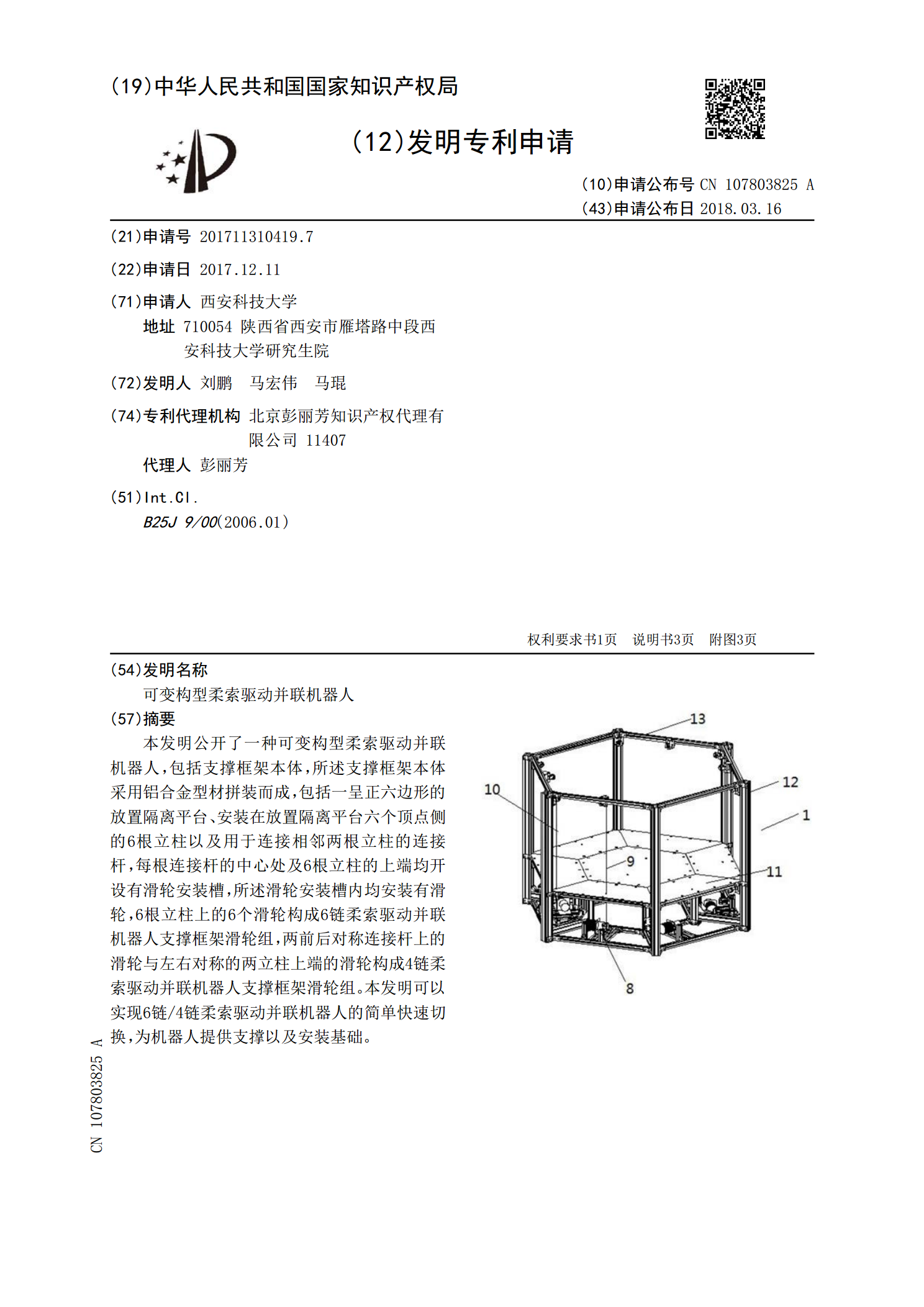
可变构型柔索驱动并联机器人.pdf
本发明公开了一种可变构型柔索驱动并联机器人,包括支撑框架本体,所述支撑框架本体采用铝合金型材拼装而成,包括一呈正六边形的放置隔离平台、安装在放置隔离平台六个顶点侧的6根立柱以及用于连接相邻两根立柱的连接杆,每根连接杆的中心处及6根立柱的上端均开设有滑轮安装槽,所述滑轮安装槽内均安装有滑轮,6根立柱上的6个滑轮构成6链柔索驱动并联机器人支撑框架滑轮组,两前后对称连接杆上的滑轮与左右对称的两立柱上端的滑轮构成4链柔索驱动并联机器人支撑框架滑轮组。本发明可以实现6链/4链柔索驱动并联机器人的简单快速切换,为机器
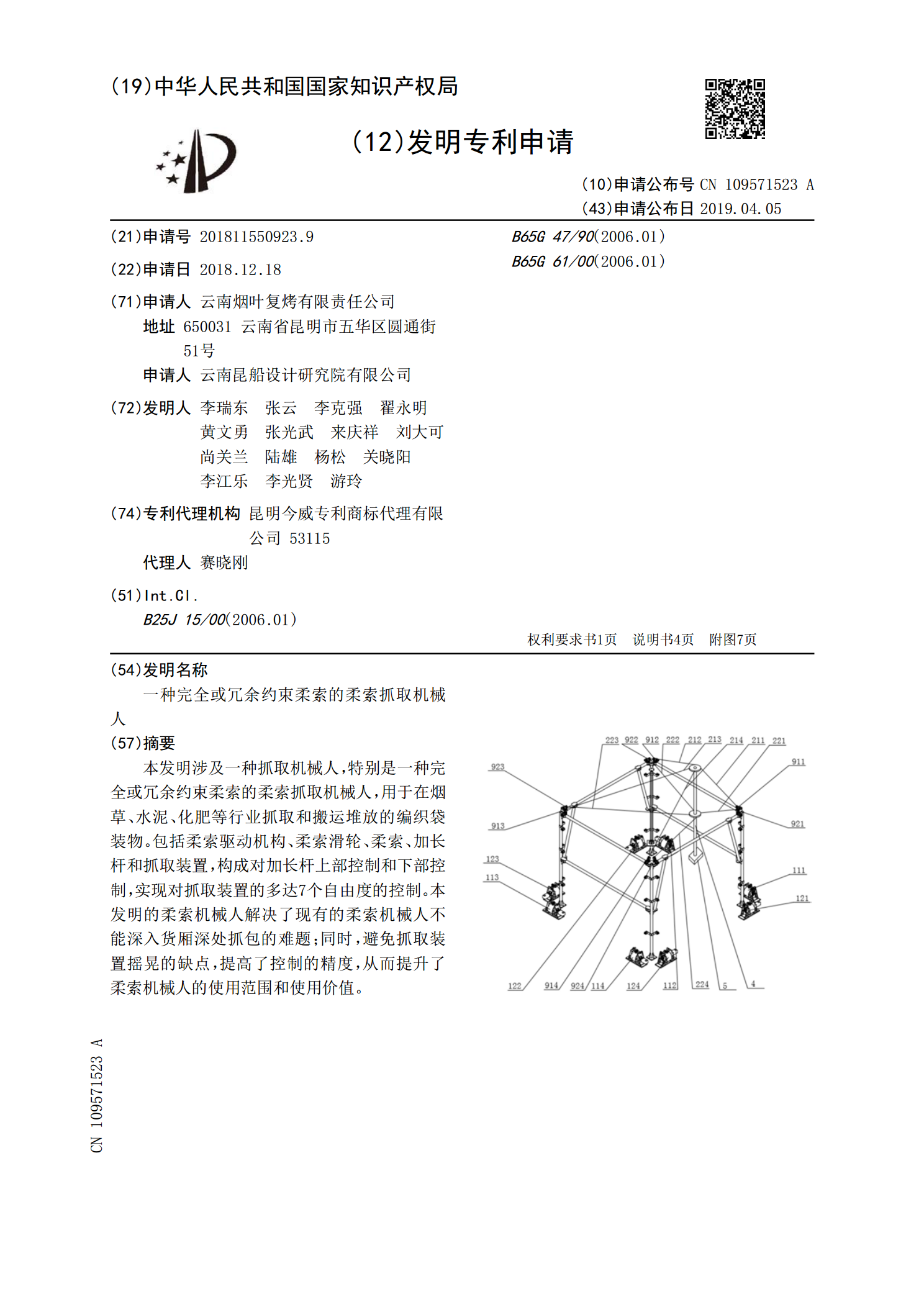
一种完全或冗余约束柔索的柔索抓取机械人.pdf
本发明涉及一种抓取机械人,特别是一种完全或冗余约束柔索的柔索抓取机械人,用于在烟草、水泥、化肥等行业抓取和搬运堆放的编织袋装物。包括柔索驱动机构、柔索滑轮、柔索、加长杆和抓取装置,构成对加长杆上部控制和下部控制,实现对抓取装置的多达7个自由度的控制。本发明的柔索机械人解决了现有的柔索机械人不能深入货厢深处抓包的难题;同时,避免抓取装置摇晃的缺点,提高了控制的精度,从而提升了柔索机械人的使用范围和使用价值。