
工业机器人抓取策略及运动规划方法研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

工业机器人抓取策略及运动规划方法研究.docx
工业机器人抓取策略及运动规划方法研究工业机器人抓取策略及运动规划方法研究摘要:随着工业机器人应用的广泛推广,机器人抓取技术的研究和发展变得尤为重要。本文旨在探讨工业机器人抓取策略及运动规划方法的研究进展,并提出了一种基于视觉感知的抓取策略与运动规划方法。通过实验验证,该方法在工业机器人抓取任务中具有较高的效果和鲁棒性。1.引言工业机器人是一种重要的自动化装备,广泛应用于现代工业生产中,其主要作用是完成重复性、繁琐、危险的工作任务。机器人的抓取技术是机器人实现自主操作和准确处理对象的关键技术之一。因此,深入
机器人运动规划方法、路径规划方法、抓取方法及其装置.pdf
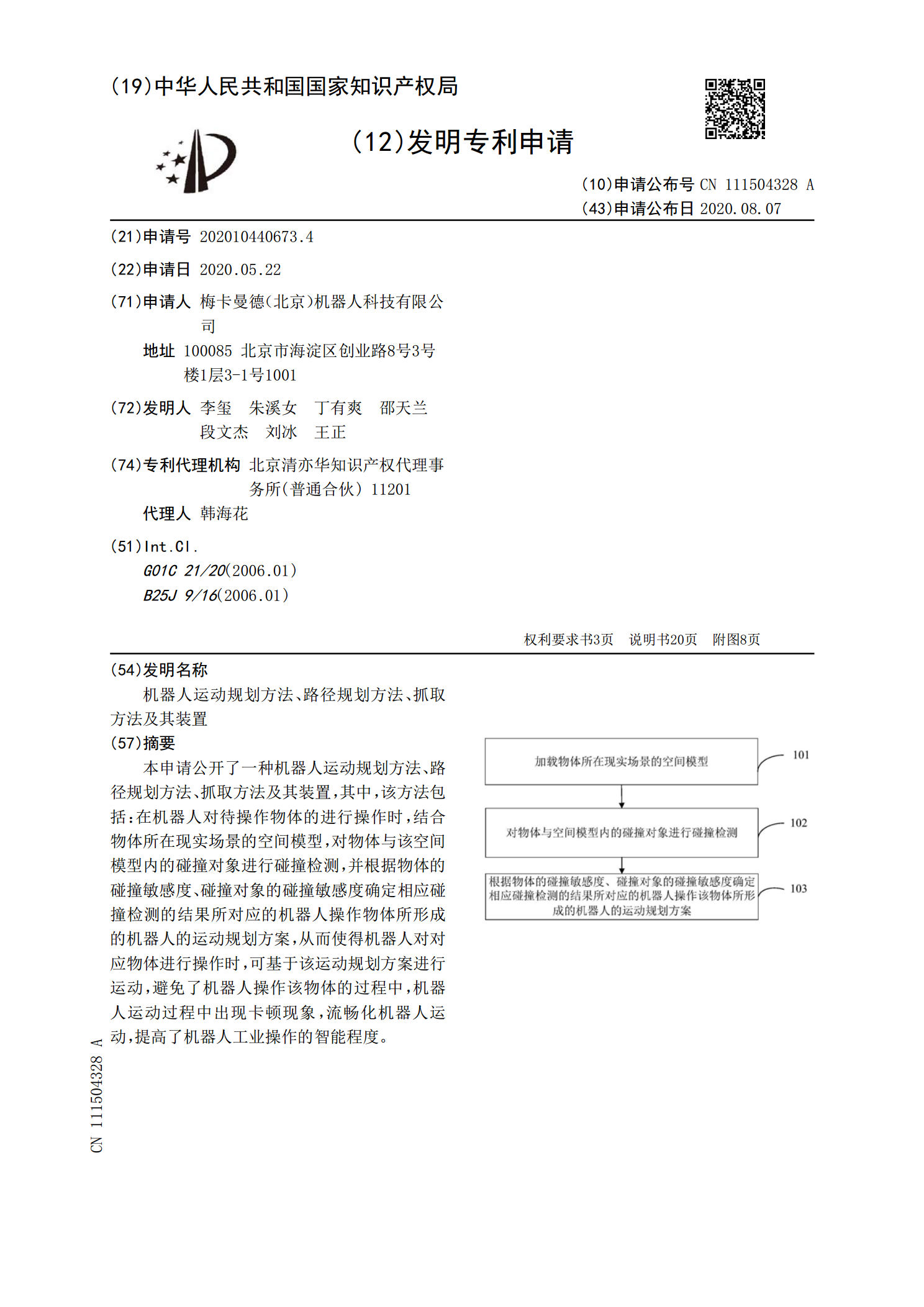
本申请公开了一种机器人运动规划方法、路径规划方法、抓取方法及其装置,其中,该方法包括:在机器人对待操作物体的进行操作时,结合物体所在现实场景的空间模型,对物体与该空间模型内的碰撞对象进行碰撞检测,并根据物体的碰撞敏感度、碰撞对象的碰撞敏感度确定相应碰撞检测的结果所对应的机器人操作物体所形成的机器人的运动规划方案,从而使得机器人对对应物体进行操作时,可基于该运动规划方案进行运动,避免了机器人操作该物体的过程中,机器人运动过程中出现卡顿现象,流畅化机器人运动,提高了机器人工业操作的智能程度。
机器人抓取运动目标的轨迹规划方法.pdf
对工业机器人抓取技术的研究.docx
对工业机器人抓取技术的研究摘要:为实现工业机器人能实现自主识别并抓取指定的目标提出了一种基于数字图像处理和网络通信的解决方法。方法中采用选择式掩膜平滑方法对图像进行滤波采用了区域生长法和边界跟踪进行轮廓提取实现对目标物质心的标记以及对目标物方位、角度的确定使用网络通信将目标物数据发送给工业机器人后者实现抓取。试验结果表明该方法在结构环境下能够获得较好的识别及定位效果为工业机器人抓取提供了目标信息。关键词:工业机器人;网络通信;数字图像处理中图分类号:TP
对工业机器人抓取技术的研究.docx
对工业机器人抓取技术的研究摘要:为实现工业机器人能实现自主识别并抓取指定的目标提出了一种基于数字图像处理和网络通信的解决方法。方法中采用选择式掩膜平滑方法对图像进行滤波采用了区域生长法和边界跟踪进行轮廓提取实现对目标物质心的标记以及对目标物方位、角度的确定使用网络通信将目标物数据发送给工业机器人后者实现抓取。试验结果表明该方法在结构环境下能够获得较好的识别及定位效果为工业机器人抓取提供了目标信息。关键词:工业机器人;网络通信;数字图像处理中图分类号:TP