
未知环境下麦克纳姆轮机器人路径规划及其目标检测定位的开题报告.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

未知环境下麦克纳姆轮机器人路径规划及其目标检测定位的开题报告.docx
未知环境下麦克纳姆轮机器人路径规划及其目标检测定位的开题报告一、研究背景与意义随着机器人技术的飞速发展,移动机器人成为了智能制造和智能物流领域中不可或缺的一部分。麦克纳姆轮机器人作为一种多轮式机器人,以无法刹车、转弯快、平稳性好等优点备受关注。然而,在未知环境下,麦克纳姆轮机器人仍面临着许多挑战,如路径规划、目标检测定位等问题。因此,本文旨在探究未知环境下麦克纳姆轮机器人路径规划及其目标检测定位方法,为移动机器人领域提供一定的理论和方法基础。二、国内外研究现状目前,国内外学者在麦克纳姆轮机器人路径规划与目

未知环境下麦克纳姆轮机器人路径规划及其目标检测定位.docx
未知环境下麦克纳姆轮机器人路径规划及其目标检测定位摘要本论文研究了在未知环境下麦克纳姆轮机器人的路径规划和目标检测定位问题。首先介绍了麦克纳姆轮机器人的基本结构和工作原理,然后分析了未知环境下路径规划和目标检测定位的挑战和难点。接着介绍了一种基于激光传感器的路径规划算法,并对其进行了详细设计和实现。然后通过实验验证了算法的有效性。接下来研究了一种基于深度学习的目标检测定位方法,并对其进行了详细的实验和分析。最后总结了本论文的工作,并提出了进一步的研究方向。1.引言随着科技的不断进步,机器人技术正在被广泛应
麦克纳姆轮及具有该麦克纳姆轮的机器人.pdf
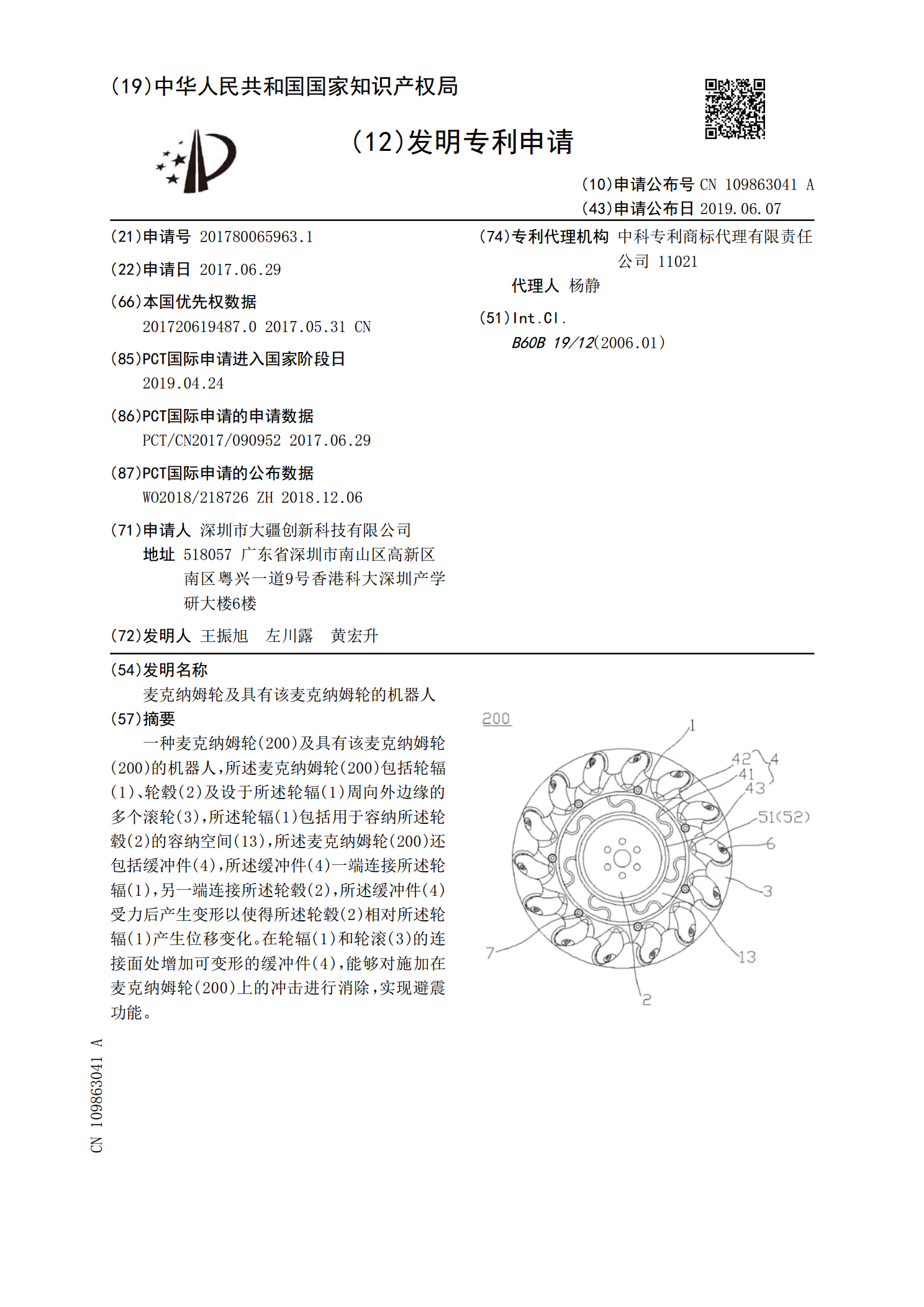
一种麦克纳姆轮(200)及具有该麦克纳姆轮(200)的机器人,所述麦克纳姆轮(200)包括轮辐(1)、轮毂(2)及设于所述轮辐(1)周向外边缘的多个滚轮(3),所述轮辐(1)包括用于容纳所述轮毂(2)的容纳空间(13),所述麦克纳姆轮(200)还包括缓冲件(4),所述缓冲件(4)一端连接所述轮辐(1),另一端连接所述轮毂(2),所述缓冲件(4)受力后产生变形以使得所述轮毂(2)相对所述轮辐(1)产生位移变化。在轮辐(1)和轮滚(3)的连接面处增加可变形的缓冲件(4),能够对施加在麦克纳姆轮(200)上的冲

麦克纳姆轮及具有该麦克纳姆轮的机器人.pdf
一种麦克纳姆轮及具有该麦克纳姆轮的机器人,麦克纳姆轮(200)包括第一轮辐(1)、与第一轮辐相对的第二轮辐(2)和设置在第一轮辐和第二轮辐之间的滚轮(5),第一轮辐设有第一轮毂(3),第二轮辐设有第二轮毂(4),其中,第二轮毂朝向第一轮毂的方向凹陷形成收容空间(6)以使第一轮毂(3)和第二轮毂(4)均位于距第一轮辐(1)和第二轮辐(2)等距离的中间平面的同一侧,收容空间(6)用以收容电机(300)。通过将现有技术中分别位于中间平面两侧的轮毂偏置设置或者将分别位于中间平面两侧的轮毂中的一个朝向另一个凹陷,以
一种麦克纳姆轮智能仓储AGV及其路径规划方法.pdf
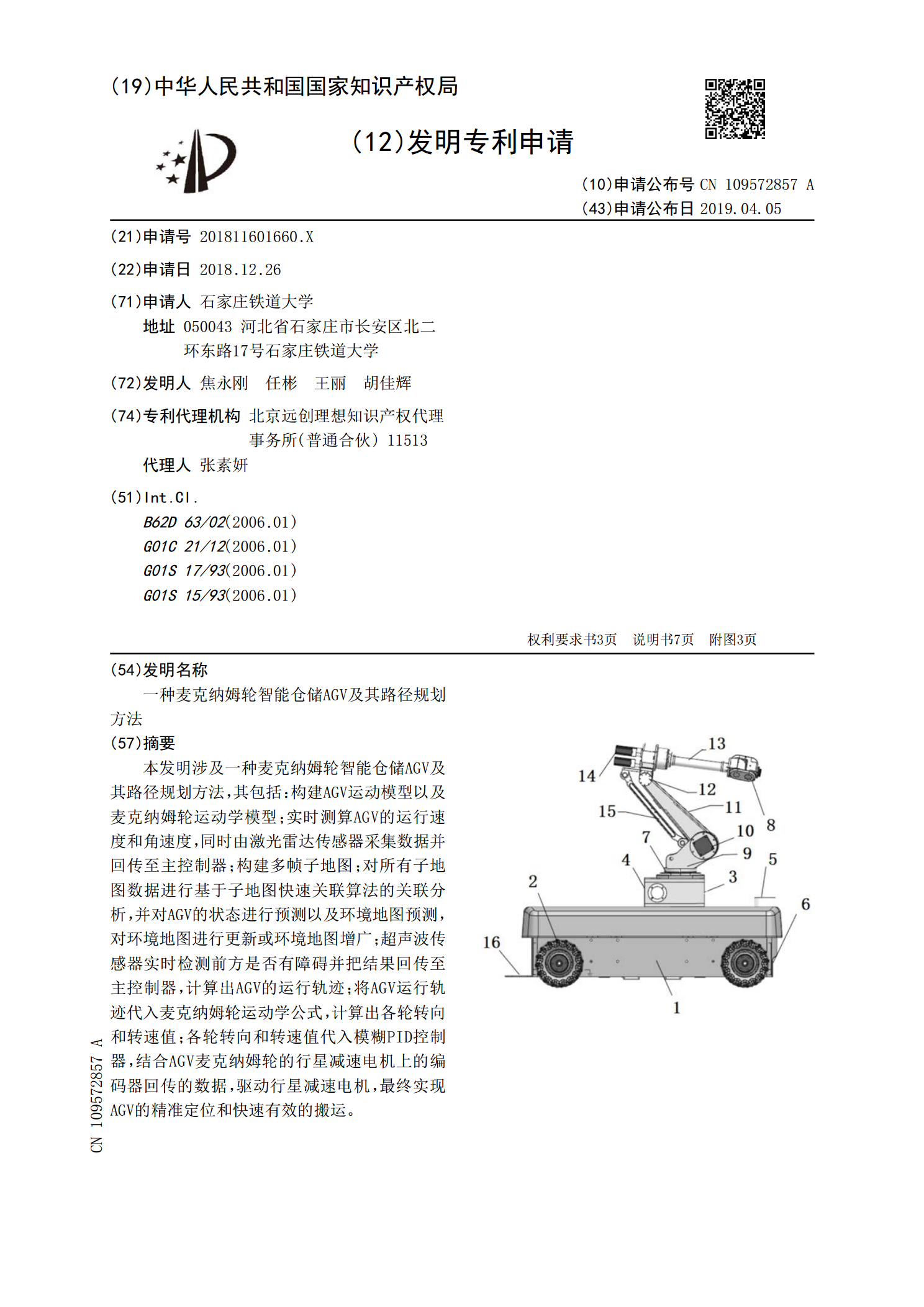
本发明涉及一种麦克纳姆轮智能仓储AGV及其路径规划方法,其包括:构建AGV运动模型以及麦克纳姆轮运动学模型;实时测算AGV的运行速度和角速度,同时由激光雷达传感器采集数据并回传至主控制器;构建多帧子地图;对所有子地图数据进行基于子地图快速关联算法的关联分析,并对AGV的状态进行预测以及环境地图预测,对环境地图进行更新或环境地图增广;超声波传感器实时检测前方是否有障碍并把结果回传至主控制器,计算出AGV的运行轨迹;将AGV运行轨迹代入麦克纳姆轮运动学公式,计算出各轮转向和转速值;各轮转向和转速值代入模糊PI