
一种麦克纳姆轮智能仓储AGV及其路径规划方法.pdf

Ja****44


1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种麦克纳姆轮智能仓储AGV及其路径规划方法.pdf
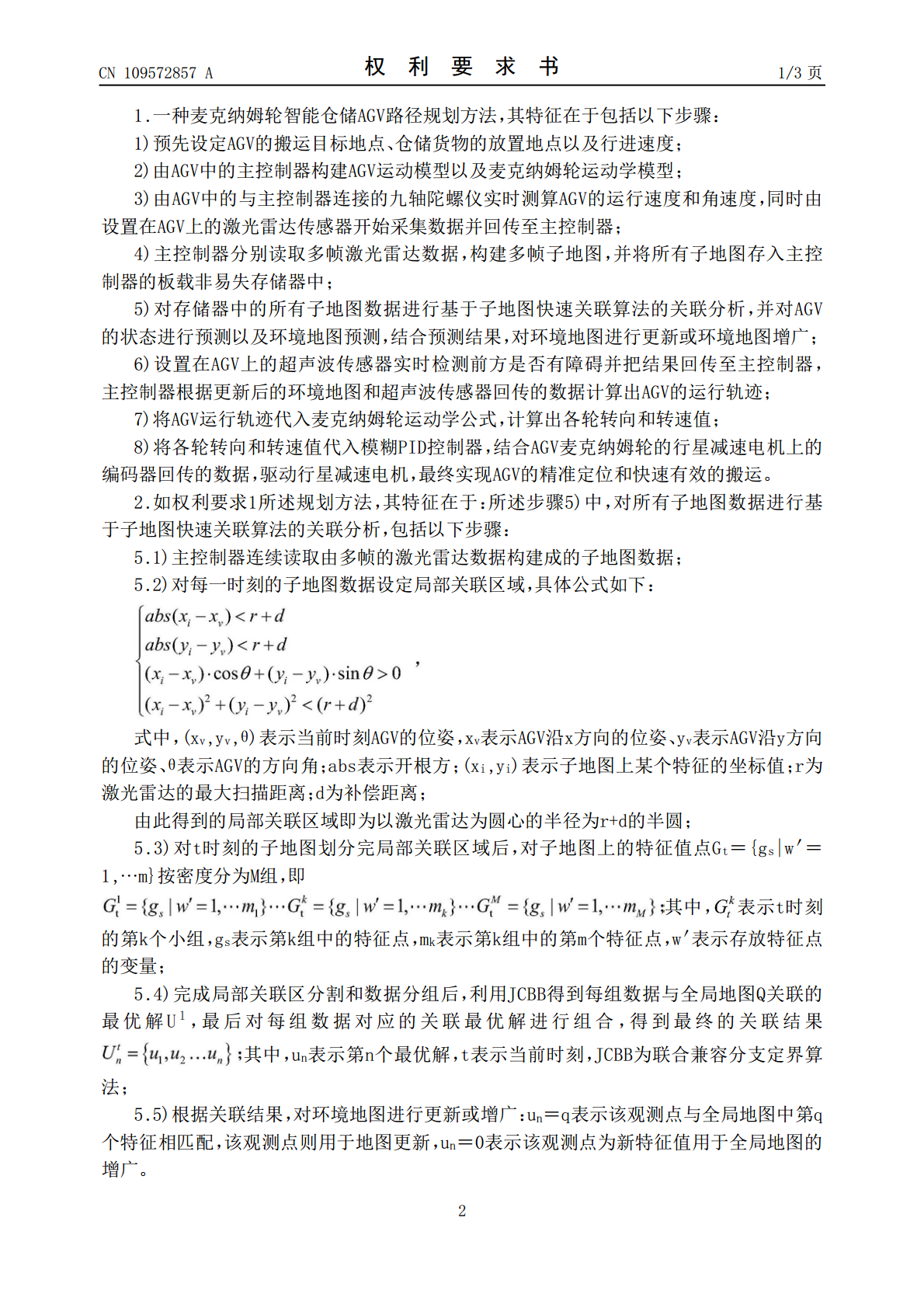
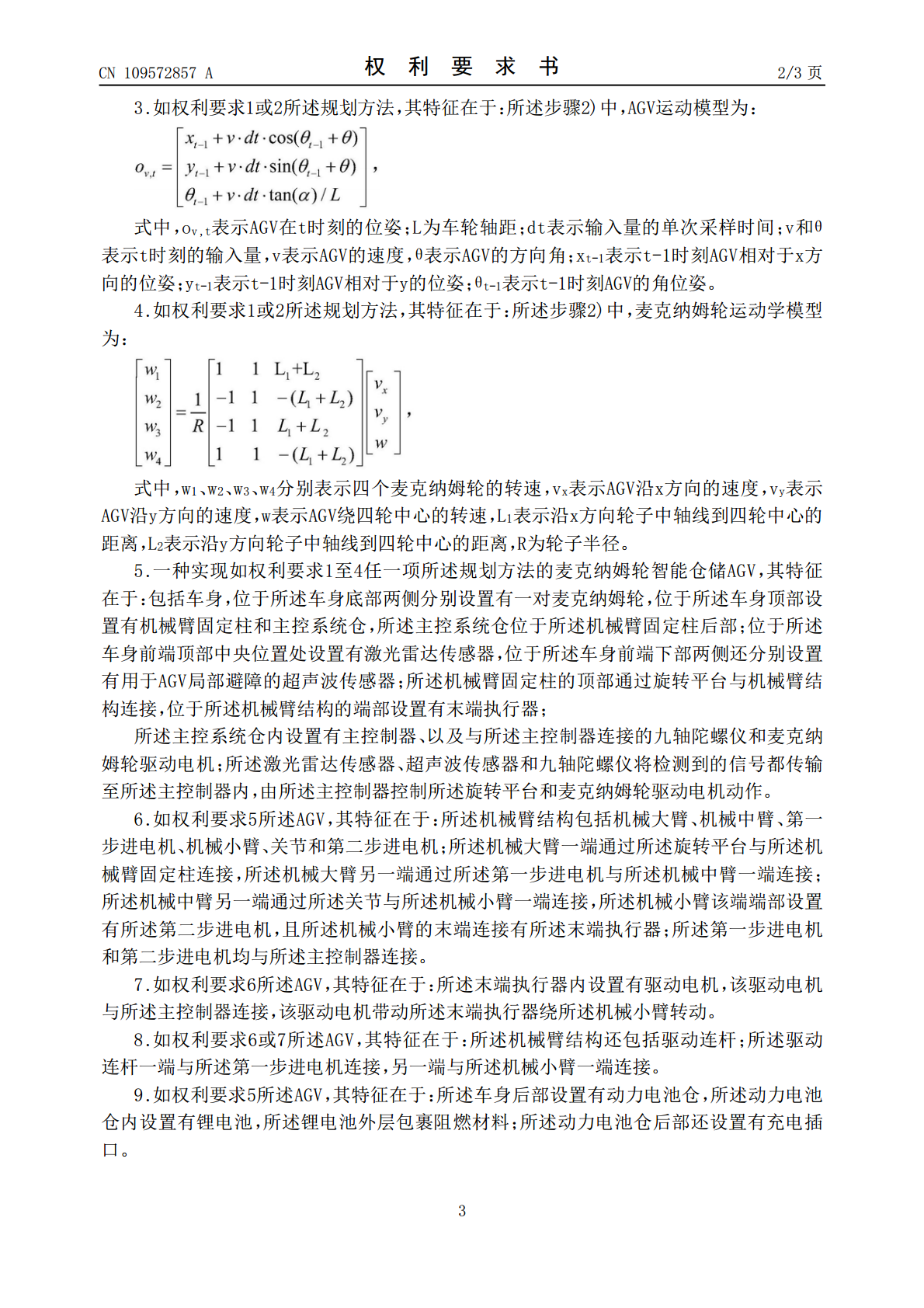
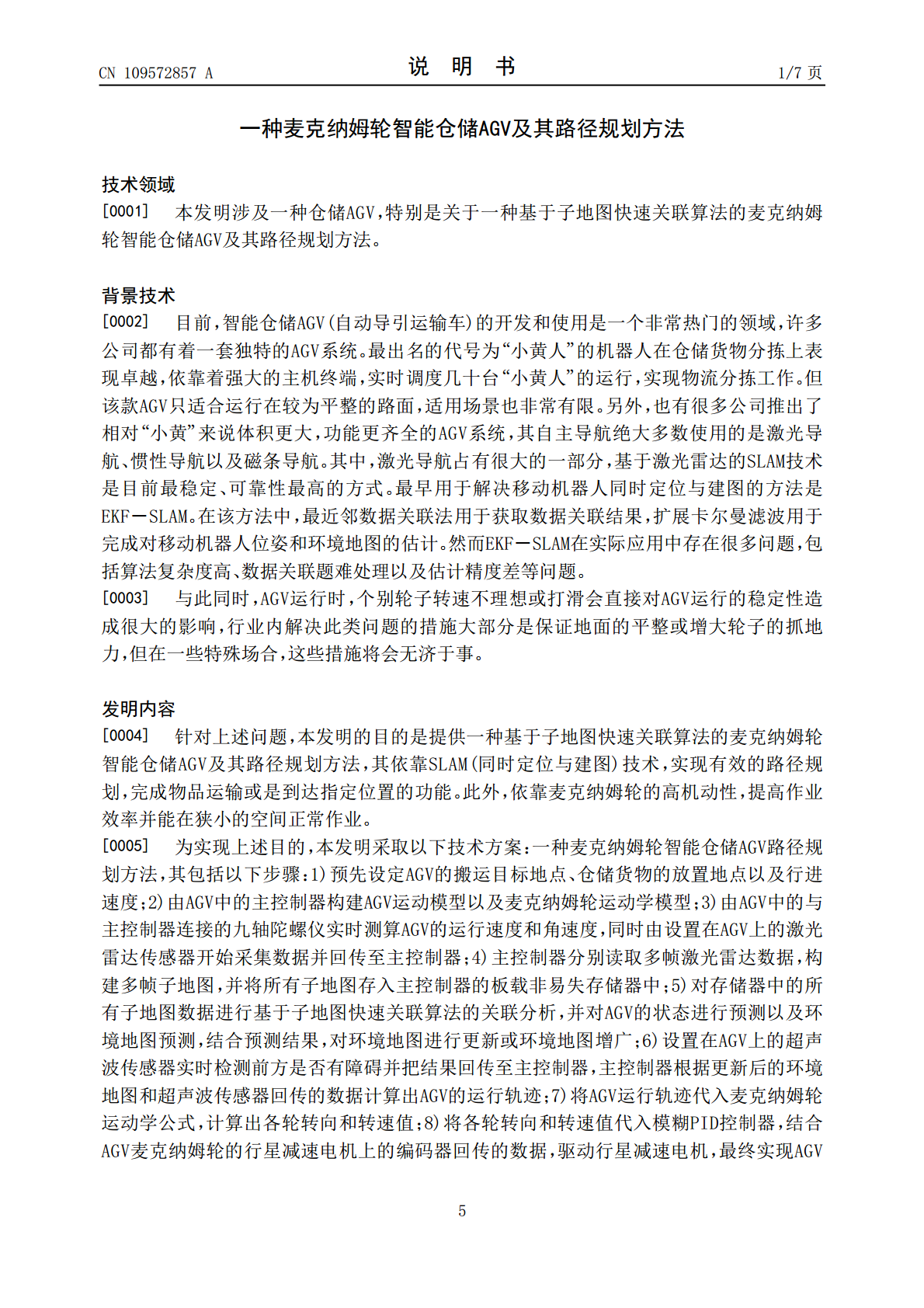
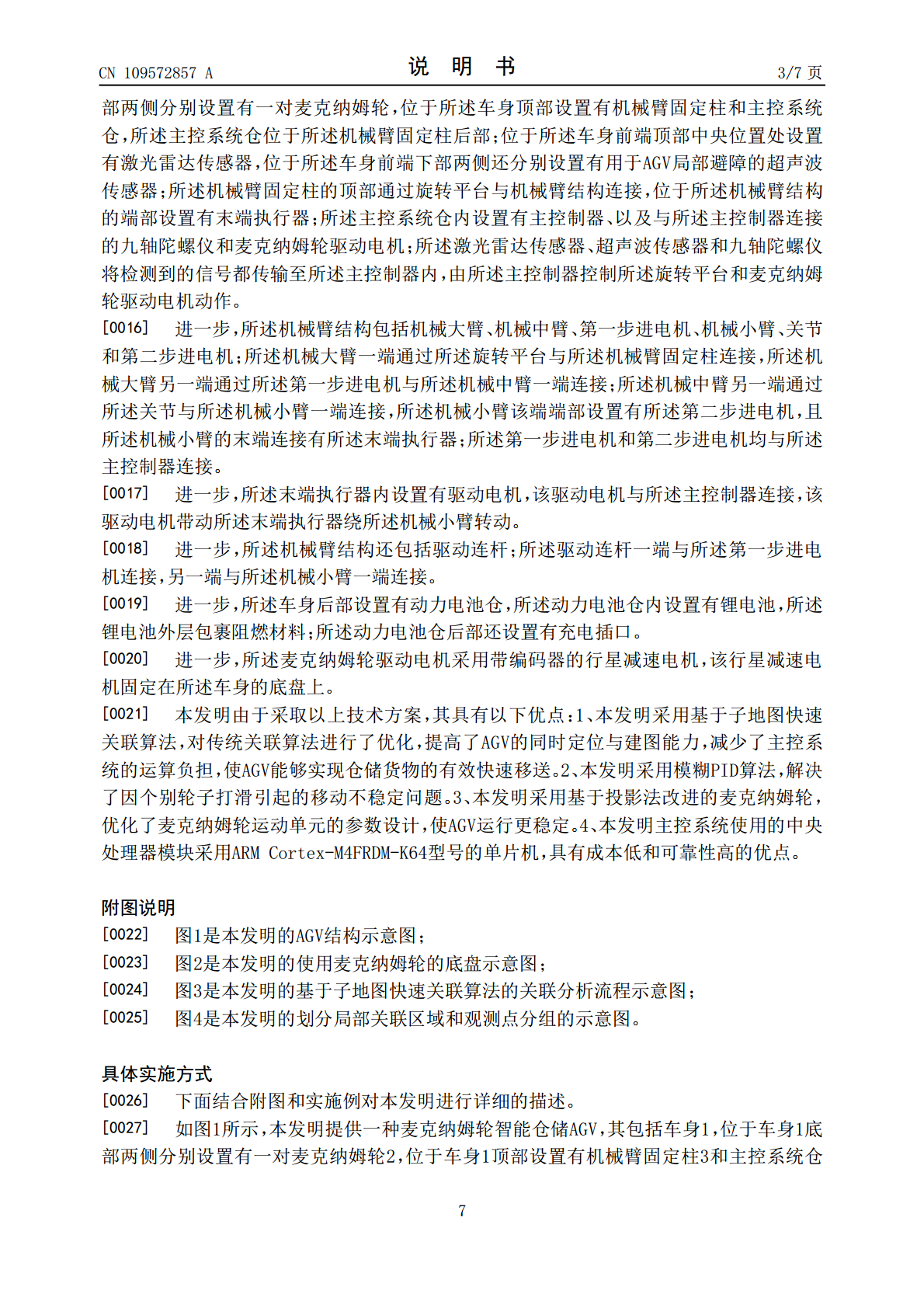
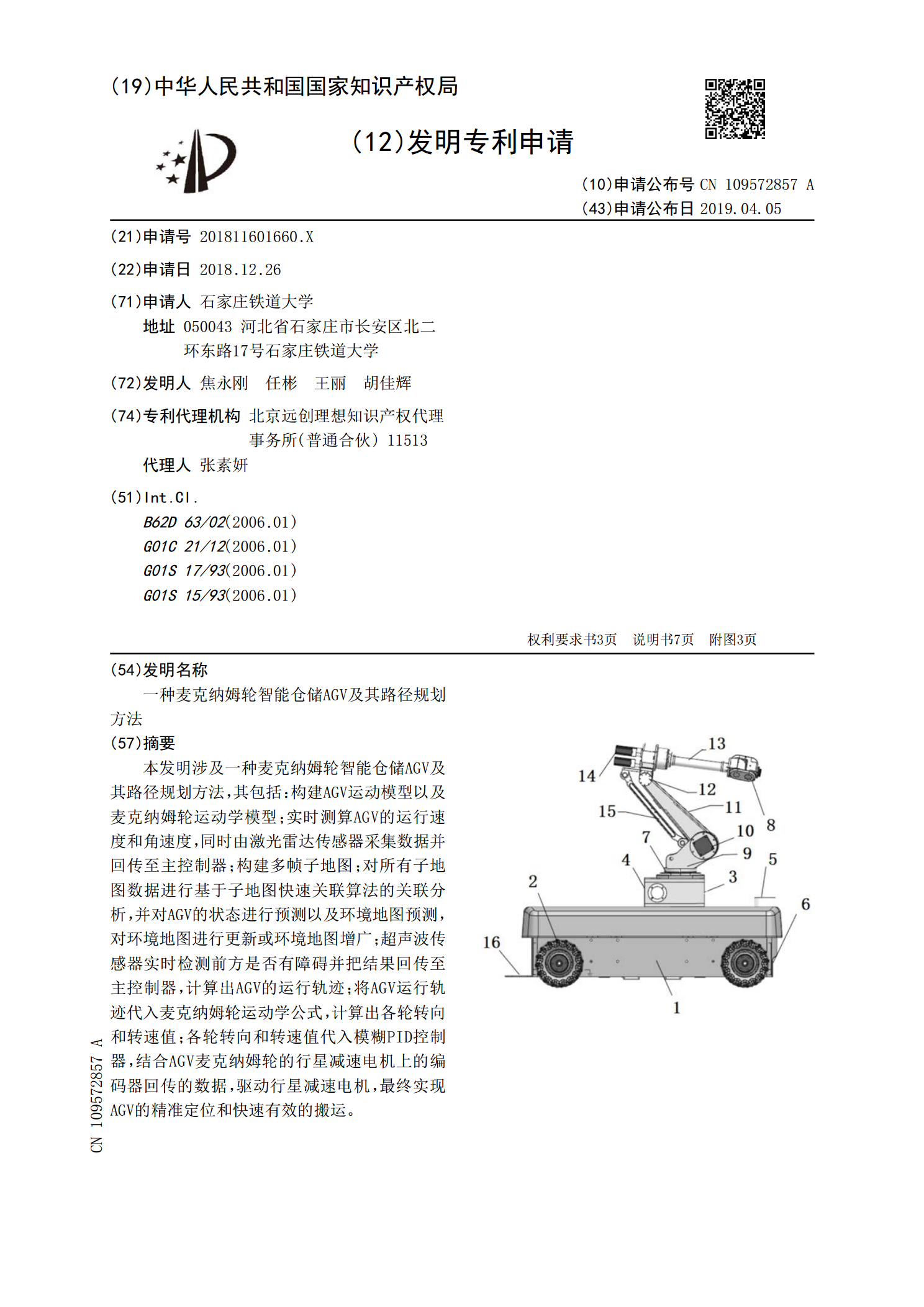
本发明涉及一种麦克纳姆轮智能仓储AGV及其路径规划方法,其包括:构建AGV运动模型以及麦克纳姆轮运动学模型;实时测算AGV的运行速度和角速度,同时由激光雷达传感器采集数据并回传至主控制器;构建多帧子地图;对所有子地图数据进行基于子地图快速关联算法的关联分析,并对AGV的状态进行预测以及环境地图预测,对环境地图进行更新或环境地图增广;超声波传感器实时检测前方是否有障碍并把结果回传至主控制器,计算出AGV的运行轨迹;将AGV运行轨迹代入麦克纳姆轮运动学公式,计算出各轮转向和转速值;各轮转向和转速值代入模糊PI
一种麦克纳姆轮AGV的任意姿态导航方法.pdf
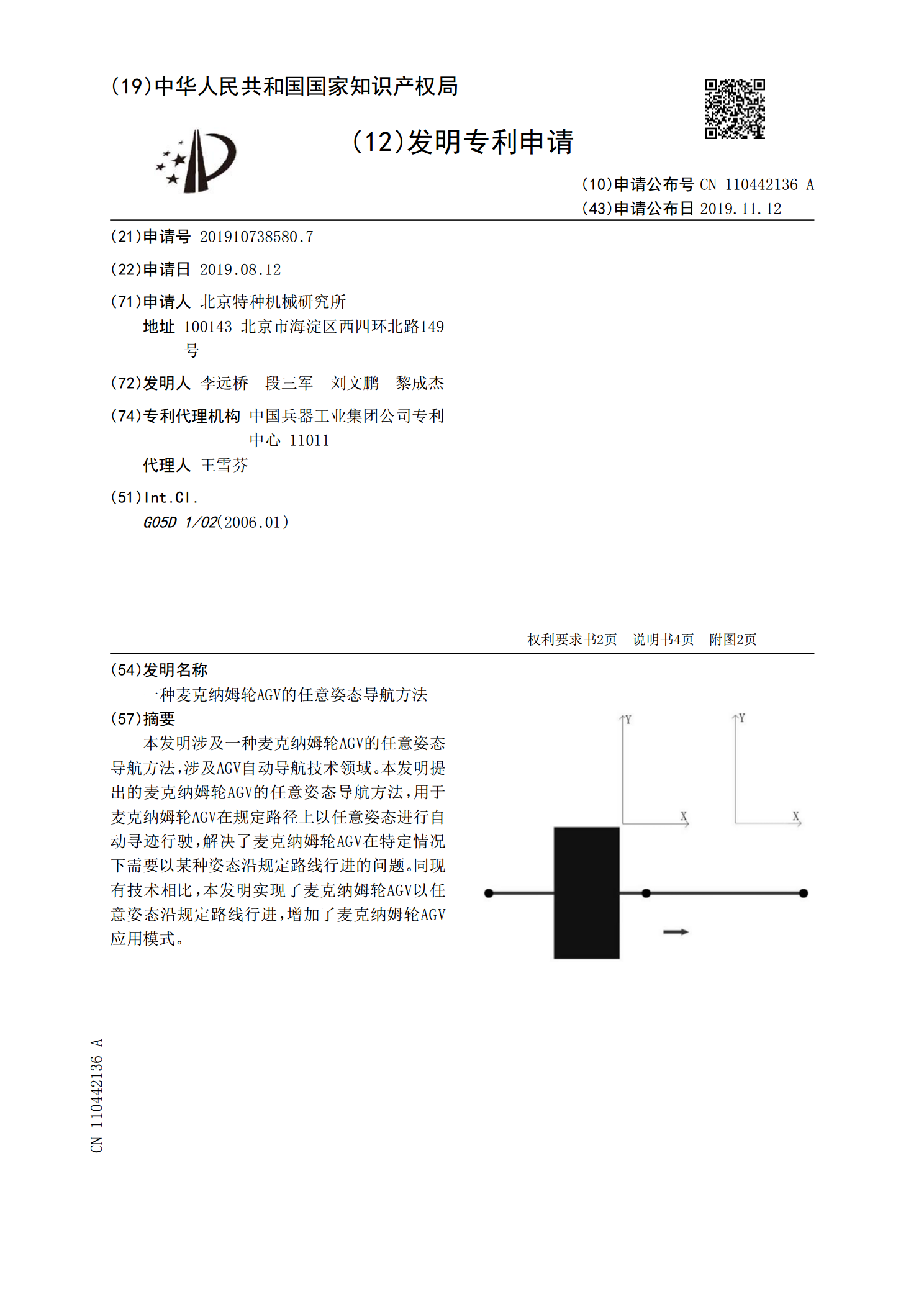
本发明涉及一种麦克纳姆轮AGV的任意姿态导航方法,涉及AGV自动导航技术领域。本发明提出的麦克纳姆轮AGV的任意姿态导航方法,用于麦克纳姆轮AGV在规定路径上以任意姿态进行自动寻迹行驶,解决了麦克纳姆轮AGV在特定情况下需要以某种姿态沿规定路线行进的问题。同现有技术相比,本发明实现了麦克纳姆轮AGV以任意姿态沿规定路线行进,增加了麦克纳姆轮AGV应用模式。
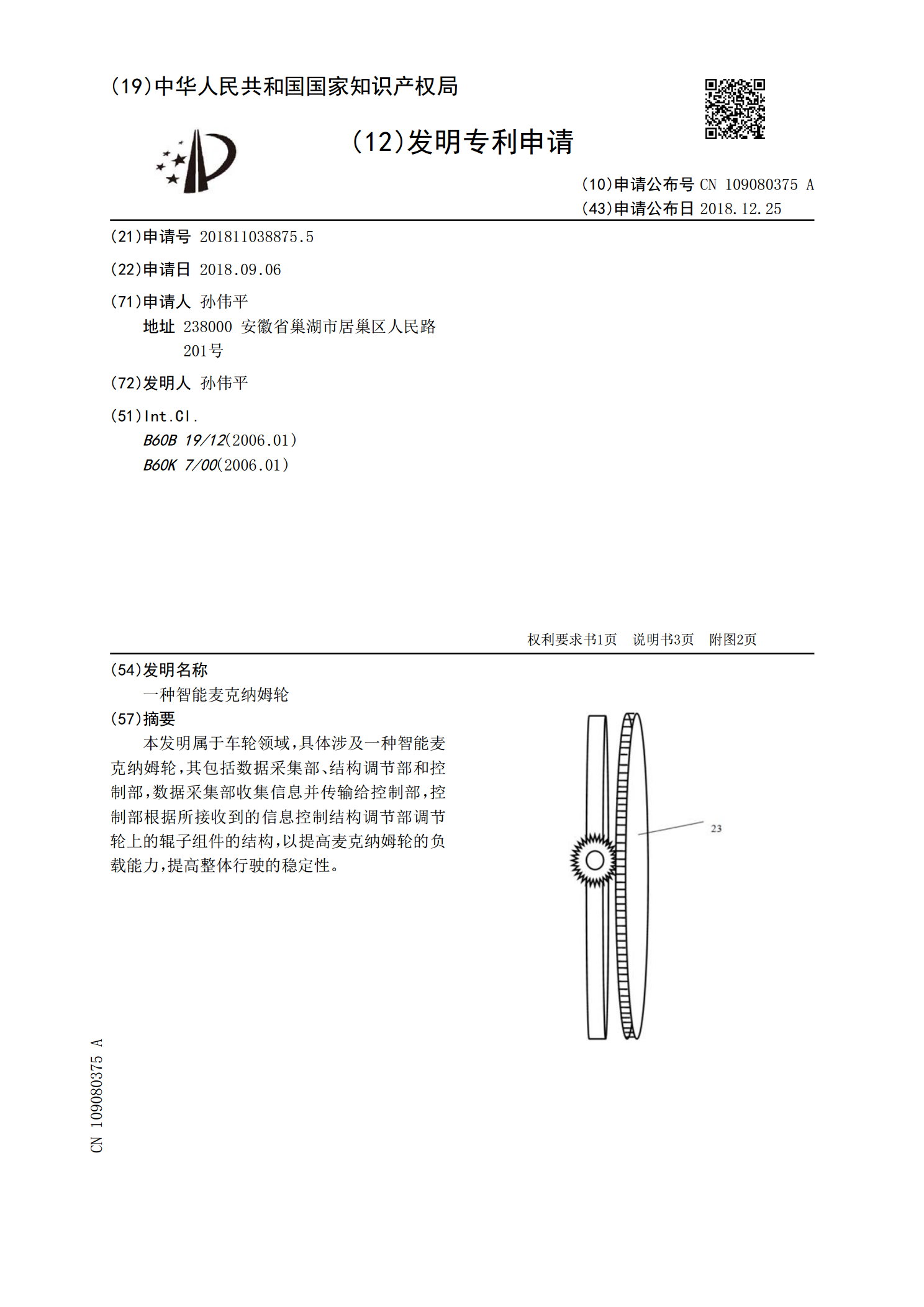
一种智能麦克纳姆轮.pdf
本发明属于车轮领域,具体涉及一种智能麦克纳姆轮,其包括数据采集部、结构调节部和控制部,数据采集部收集信息并传输给控制部,控制部根据所接收到的信息控制结构调节部调节轮上的辊子组件的结构,以提高麦克纳姆轮的负载能力,提高整体行驶的稳定性。
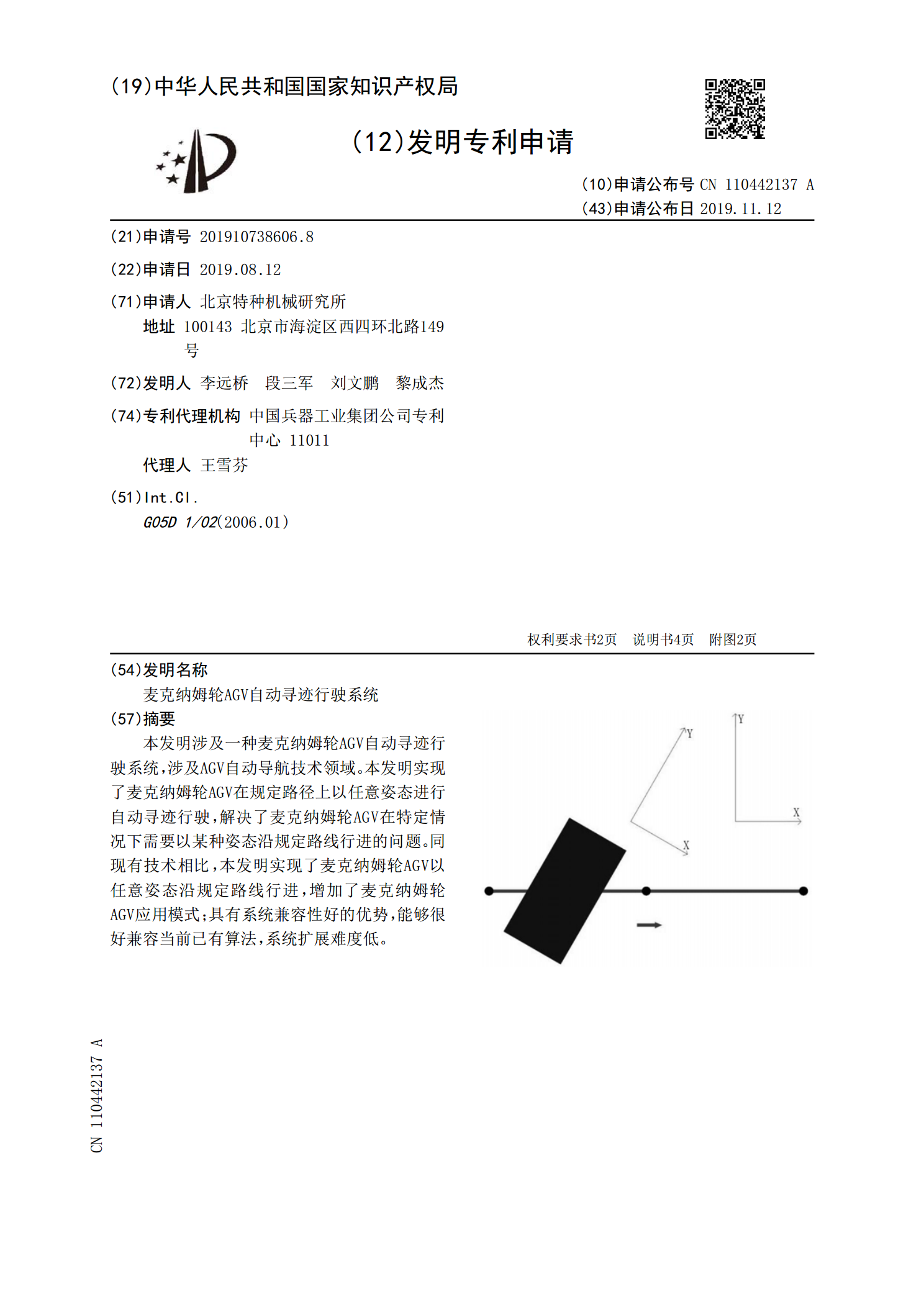
麦克纳姆轮AGV自动寻迹行驶系统.pdf
本发明涉及一种麦克纳姆轮AGV自动寻迹行驶系统,涉及AGV自动导航技术领域。本发明实现了麦克纳姆轮AGV在规定路径上以任意姿态进行自动寻迹行驶,解决了麦克纳姆轮AGV在特定情况下需要以某种姿态沿规定路线行进的问题。同现有技术相比,本发明实现了麦克纳姆轮AGV以任意姿态沿规定路线行进,增加了麦克纳姆轮AGV应用模式;具有系统兼容性好的优势,能够很好兼容当前已有算法,系统扩展难度低。

基于麦克纳姆轮的全向AGV移动平台控制方法研究.docx
基于麦克纳姆轮的全向AGV移动平台控制方法研究基于麦克纳姆轮的全向AGV移动平台控制方法研究摘要:随着工业自动化和智能化的快速发展,自动导引车辆(AGV)被广泛应用于物流、生产线等领域。全向AGV是一种能够实现多向行驶和精确定位的移动平台,其具备快速、高效和灵活等特点。本论文针对基于麦克纳姆轮的全向AGV移动平台控制进行深入研究,通过分析麦克纳姆轮的运动学模型和动力学模型,提出了一种基于PID控制的运动控制算法,并通过实验验证了该算法的有效性。关键词:全向AGV,麦克纳姆轮,运动控制,PID控制1.引言自