
麦克纳姆轮及具有该麦克纳姆轮的机器人.pdf

运升****魔王


1/1
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
麦克纳姆轮及具有该麦克纳姆轮的机器人.pdf
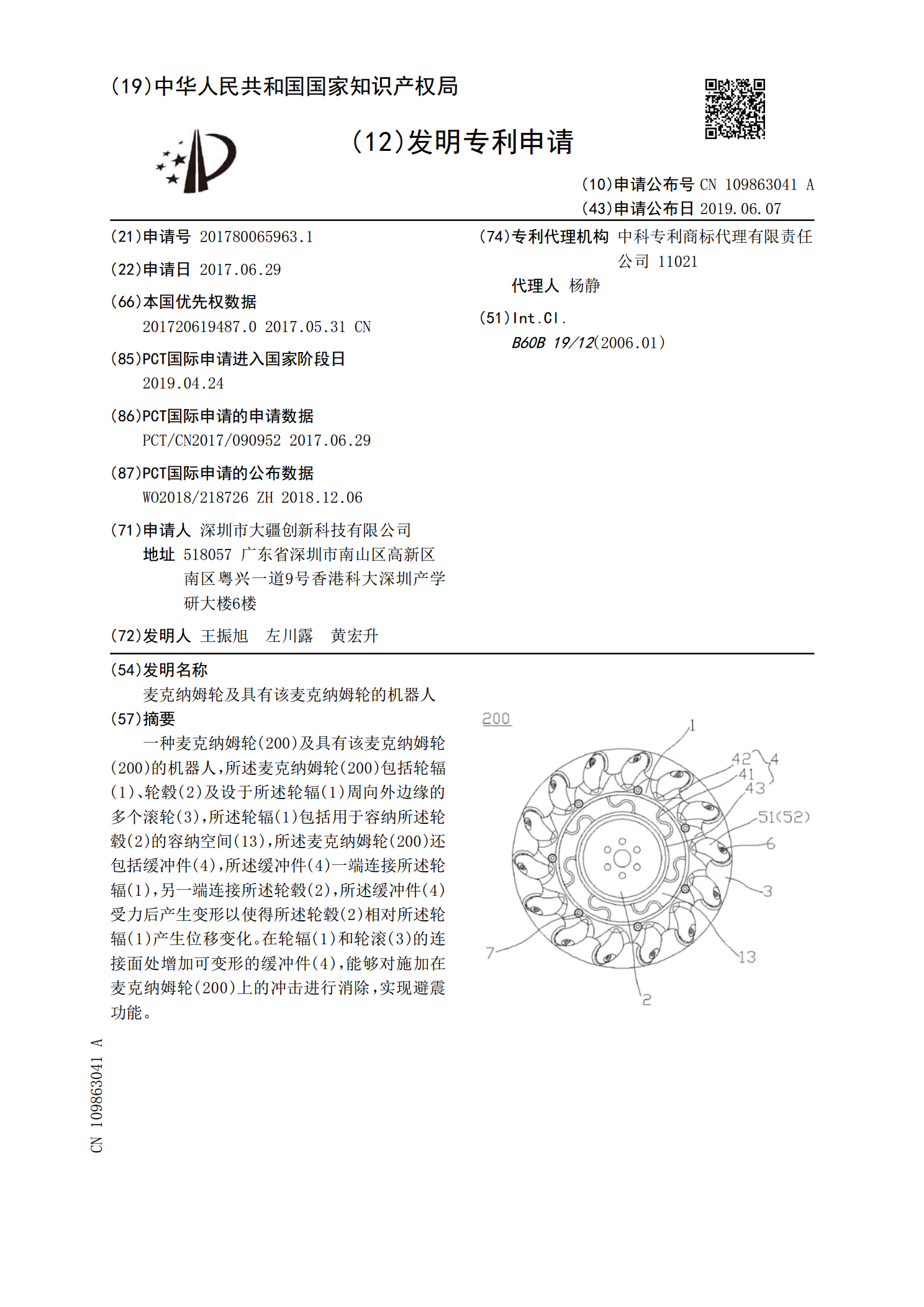
一种麦克纳姆轮(200)及具有该麦克纳姆轮(200)的机器人,所述麦克纳姆轮(200)包括轮辐(1)、轮毂(2)及设于所述轮辐(1)周向外边缘的多个滚轮(3),所述轮辐(1)包括用于容纳所述轮毂(2)的容纳空间(13),所述麦克纳姆轮(200)还包括缓冲件(4),所述缓冲件(4)一端连接所述轮辐(1),另一端连接所述轮毂(2),所述缓冲件(4)受力后产生变形以使得所述轮毂(2)相对所述轮辐(1)产生位移变化。在轮辐(1)和轮滚(3)的连接面处增加可变形的缓冲件(4),能够对施加在麦克纳姆轮(200)上的冲

麦克纳姆轮及具有该麦克纳姆轮的机器人.pdf
一种麦克纳姆轮及具有该麦克纳姆轮的机器人,麦克纳姆轮(200)包括第一轮辐(1)、与第一轮辐相对的第二轮辐(2)和设置在第一轮辐和第二轮辐之间的滚轮(5),第一轮辐设有第一轮毂(3),第二轮辐设有第二轮毂(4),其中,第二轮毂朝向第一轮毂的方向凹陷形成收容空间(6)以使第一轮毂(3)和第二轮毂(4)均位于距第一轮辐(1)和第二轮辐(2)等距离的中间平面的同一侧,收容空间(6)用以收容电机(300)。通过将现有技术中分别位于中间平面两侧的轮毂偏置设置或者将分别位于中间平面两侧的轮毂中的一个朝向另一个凹陷,以
麦克纳姆轮.ppt
电动轮椅的简介电动轮椅的研究意义电动轮椅的研究方向轮椅控制系统逻辑图电动轮椅的详细设计1.轮椅主架设计2.电机的计算和选型以及电机控制电机的选择增量式编码器旋转编码器3.控制电路BTS7960全桥驱动电路示意图4.麦克纳姆轮的结构与选择全向轮的选择QLM-156寸90度全向轮5.升降装置的选型6.电池的选型其他成本核算
麦克纳姆轮车的控制方法和麦克纳姆轮车.pdf
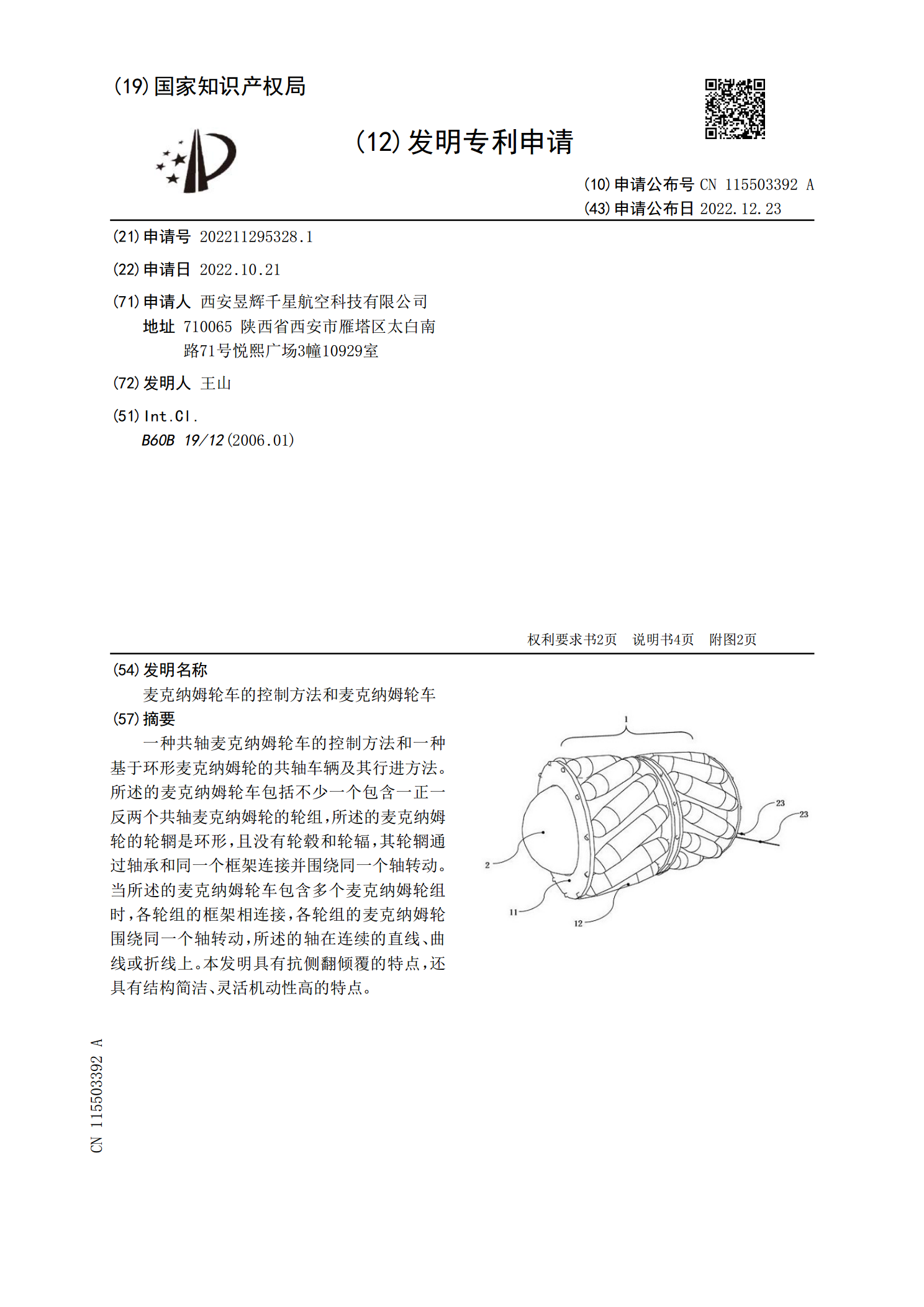
一种共轴麦克纳姆轮车的控制方法和一种基于环形麦克纳姆轮的共轴车辆及其行进方法。所述的麦克纳姆轮车包括不少一个包含一正一反两个共轴麦克纳姆轮的轮组,所述的麦克纳姆轮的轮辋是环形,且没有轮毂和轮辐,其轮辋通过轴承和同一个框架连接并围绕同一个轴转动。当所述的麦克纳姆轮车包含多个麦克纳姆轮组时,各轮组的框架相连接,各轮组的麦克纳姆轮围绕同一个轴转动,所述的轴在连续的直线、曲线或折线上。本发明具有抗侧翻倾覆的特点,还具有结构简洁、灵活机动性高的特点。
麦克纳姆轮车.pdf
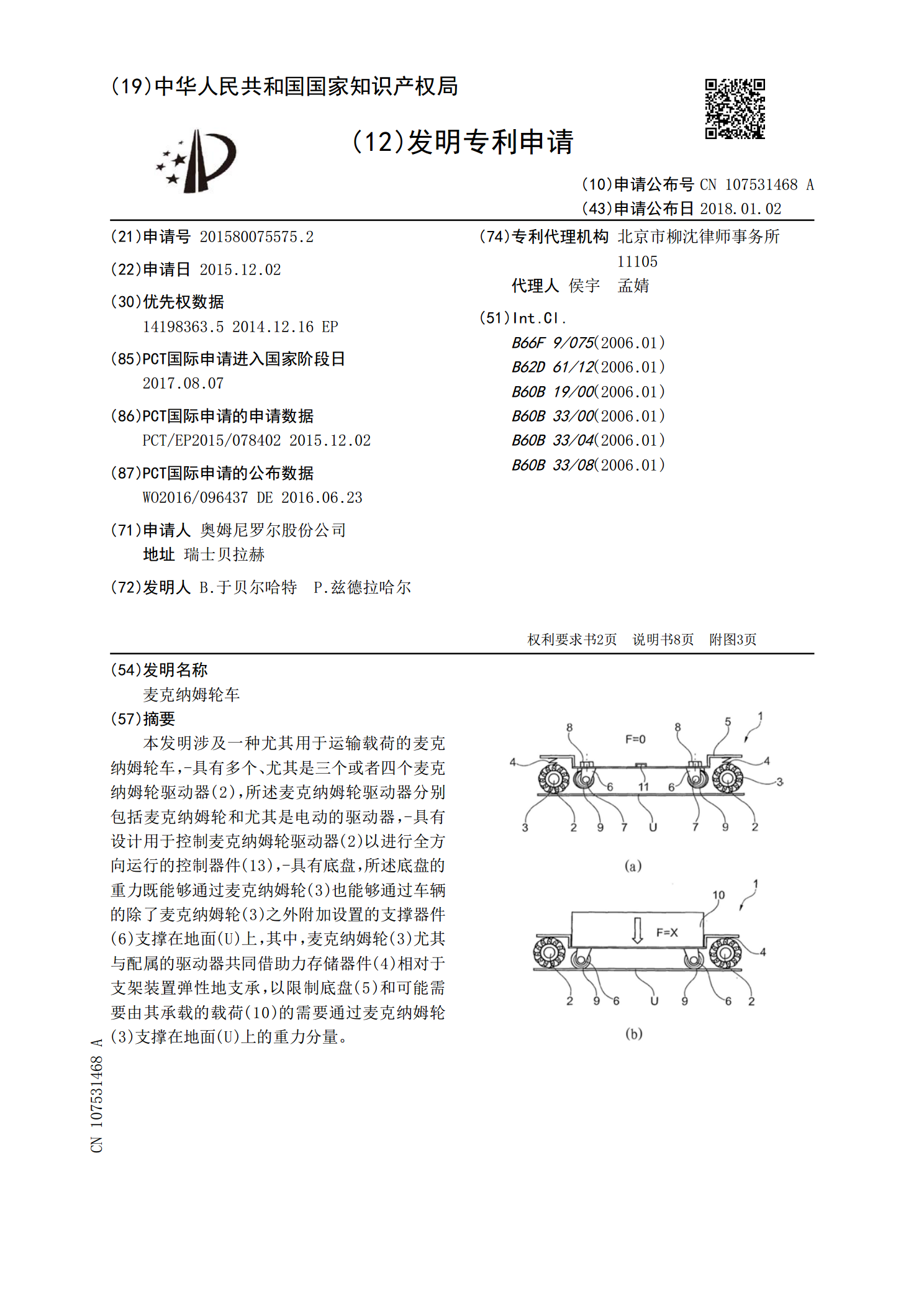
本发明涉及一种尤其用于运输载荷的麦克纳姆轮车,‑具有多个、尤其是三个或者四个麦克纳姆轮驱动器(2),所述麦克纳姆轮驱动器分别包括麦克纳姆轮和尤其是电动的驱动器,‑具有设计用于控制麦克纳姆轮驱动器(2)以进行全方向运行的控制器件(13),‑具有底盘,所述底盘的重力既能够通过麦克纳姆轮(3)也能够通过车辆的除了麦克纳姆轮(3)之外附加设置的支撑器件(6)支撑在地面(U)上,其中,麦克纳姆轮(3)尤其与配属的驱动器共同借助力存储器件(4)相对于支架装置弹性地支承,以限制底盘(5)和可能需要由其承载的载荷(10)