
S PLC编程及应用第三版.ppt

15****92

1/10

2/10
3/10
4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共31页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

S PLC编程及应用第三版.ppt
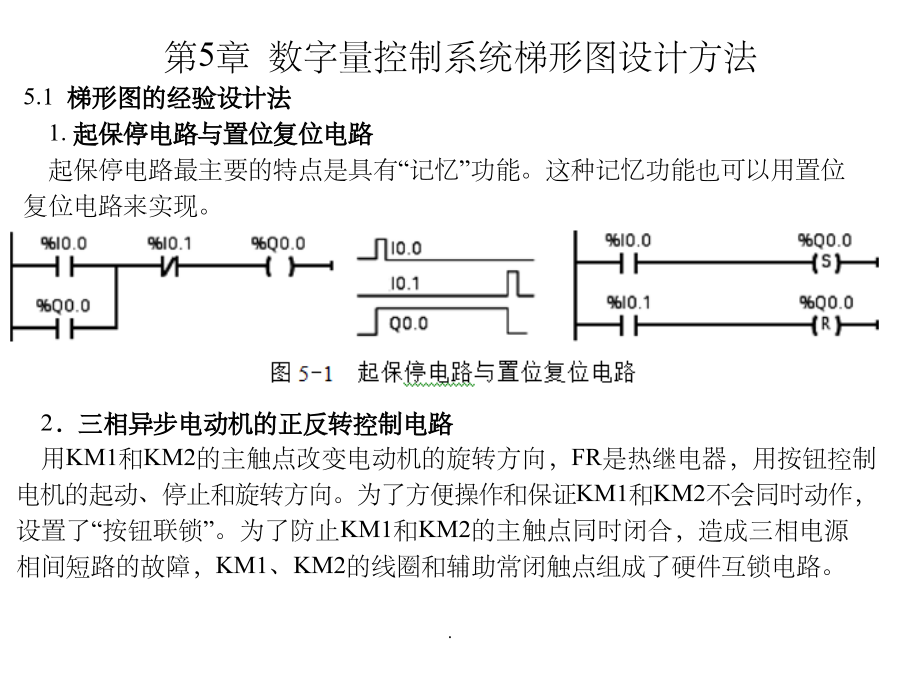
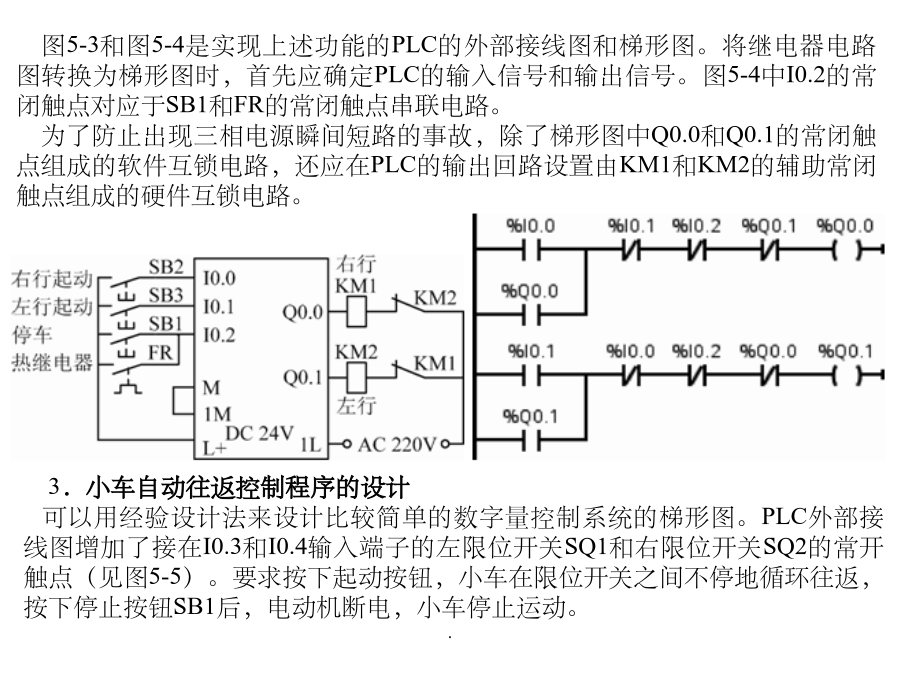
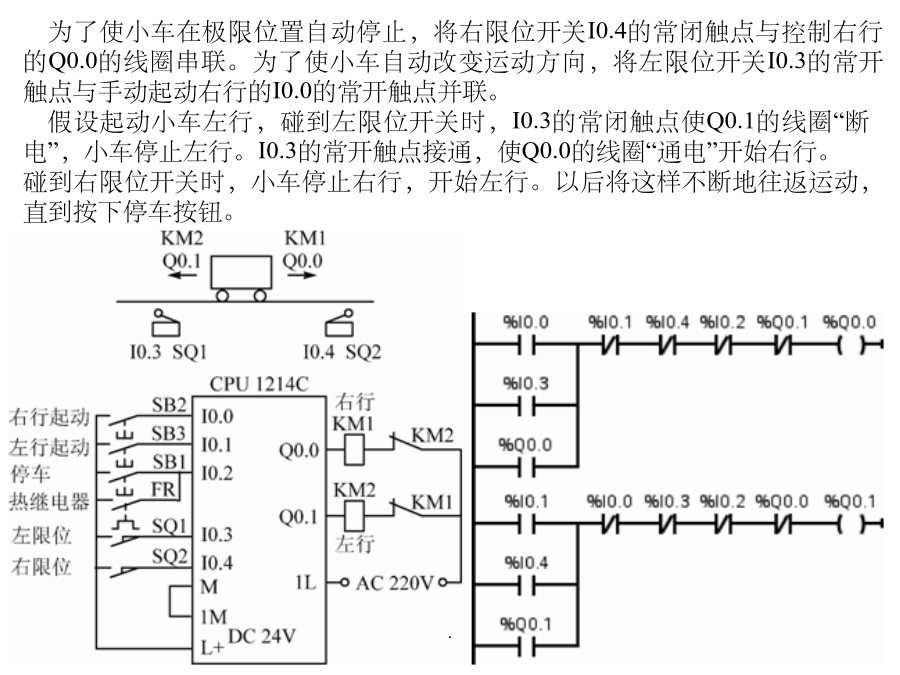
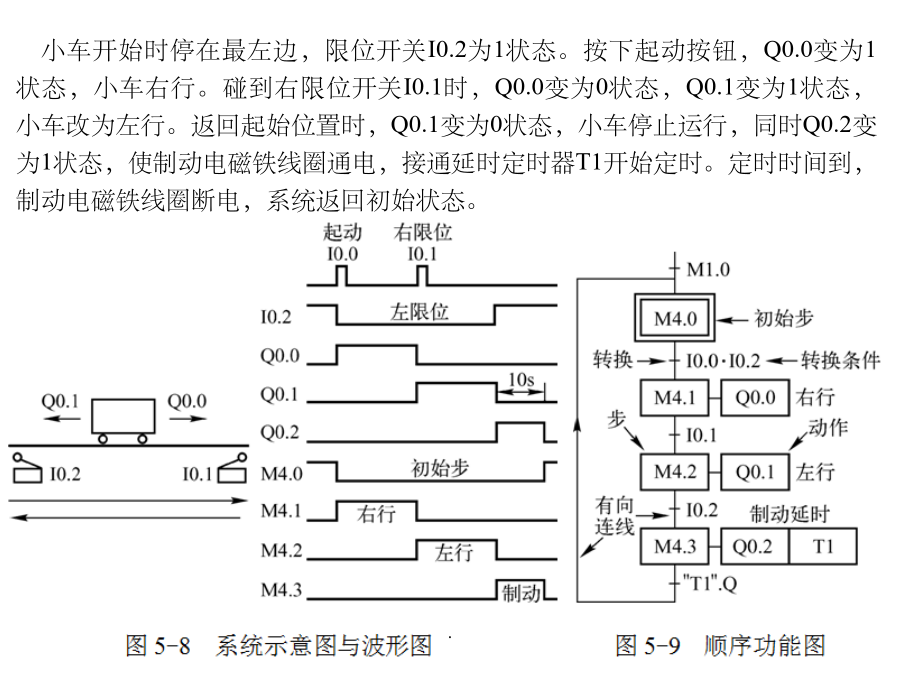
第5章数字量控制系统梯形图设计方法5.1梯形图的经验设计法1.起保停电路与置位复位电路起保停电路最主要的特点是具有“记忆”功能。这种记忆功能也可以用置位复位电路来实现。.图5-3和图5-4是实现上述功能的PLC的外部接线图和梯形图。将继电器电路图转换为梯形图时,首先应确定PLC的输入信号和输出信号。图5-4中I0.2的常闭触点对应于SB1和FR的常闭触点串联电路。为了防止出现三相电源瞬间短路的事故,除了梯形图中Q0.0和Q0.1的常闭触点组成的软件互锁电路,还应在PLC的输出回路设置由KM1和KM2的辅助

S PLC编程及应用第三版.ppt
第4章S7-1200的用户程序结构在接口区中生成局部变量,后者只能在它所在的块中使用。右键单击项目树中的FC1,单击快捷菜单中的“属性”,选中打开的对话框左边的“属性”,用复选框取消默认的属性“块的优化访问”。成功编译后接口区出现“偏移量”列,只有临时数据才有偏移量。函数各种类型的局部变量的作用如下:1)输入参数Input用于接收调用它的主调块提供的输入数据。2)输出参数Output用于将块的程序执行结果返回给主调块。3)输入_输出参数InOut的初值由主调块提供,块执行完后用同一个参数将它的值返回给主调
S-PLC编程及应用第三版ppt课件.ppt
第5章数字量控制系统梯形图设计方法5.1梯形图的经验设计法1.起保停电路与置位复位电路起保停电路最主要的特点是具有“记忆”功能。这种记忆功能也可以用置位复位电路来实现。图5-3和图5-4是实现上述功能的PLC的外部接线图和梯形图。将继电器电路图转换为梯形图时,首先应确定PLC的输入信号和输出信号。图5-4中I0.2的常闭触点对应于SB1和FR的常闭触点串联电路。为了防止出现三相电源瞬间短路的事故,除了梯形图中Q0.0和Q0.1的常闭触点组成的软件互锁电路,还应在PLC的输出回路设置由KM1和KM2的辅助常
S7-1200PLC编程及应用第三版_课后习题答案.pdf
穷则独善其身,达则兼善天下。——《孟子》S7-1200PLC编程及应⽤第三版_课后习题答案《S7-1200PLC编程及应⽤》第3版习题答案V2.0习题答案V2.0由本⽂件和14个项⽬⽂件组成,⼏乎包含全部习题的答案。第1章1.填空1)CPU1214C最多可以扩展_8_个信号模块、_3个通信模块。信号模块安装在CPU的右边,通信模块安装在CPU的左边。2)CPU1214C有集成的14点数字量输⼊、10点数字量输出、2点模拟量输⼊,6点⾼速输出、4点⾼速输⼊。3)模拟量输⼊模块输⼊的-10~+10V电压转换后
s71200plc编程及应用题库.pdf
一、s7-1200PLC编程概述1.1s7-1200PLC概述s7-1200PLC是西门子公司推出的一款基于S7-1200系列CPU的工业控制器。该控制器具有高性能、可靠性、灵活性强等特点,广泛应用于各种自动化控制领域。1.2PLC编程概述PLC编程是指使用特定的编程软件对PLC进行逻辑控制程序的设计和编写,以实现工业自动化控制。s7-1200PLC编程是工业自动化领域中常见的一种编程方式。二、s7-1200PLC编程语言2.1STL(结构化文本语言)STL是一种类似于汇编语言的PLC编程语言,用于对PL