
S-PLC编程及应用第三版ppt课件.ppt

lj****88


1/10

2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共31页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
S-PLC编程及应用第三版ppt课件.ppt
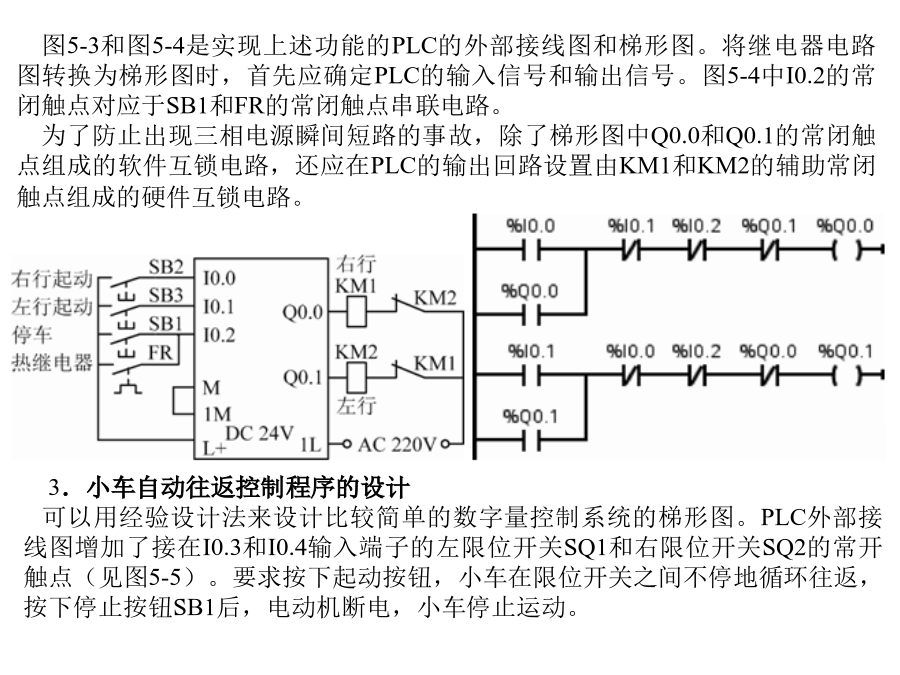
第5章数字量控制系统梯形图设计方法5.1梯形图的经验设计法1.起保停电路与置位复位电路起保停电路最主要的特点是具有“记忆”功能。这种记忆功能也可以用置位复位电路来实现。图5-3和图5-4是实现上述功能的PLC的外部接线图和梯形图。将继电器电路图转换为梯形图时,首先应确定PLC的输入信号和输出信号。图5-4中I0.2的常闭触点对应于SB1和FR的常闭触点串联电路。为了防止出现三相电源瞬间短路的事故,除了梯形图中Q0.0和Q0.1的常闭触点组成的软件互锁电路,还应在PLC的输出回路设置由KM1和KM2的辅助常
西门子SPLC教程ppt课件.ppt
第7章本章主要内容:7.1系统设计7.1.1系统设计的原则7.1.2系统设计的步骤7.2程序设计程序设计的内容包括:编写程序、编译程序、模拟运行及调试程序等。程序设计的方法是指用什么方法和编程语言来编写用户程序。程序设计有多种方法:如果控制系统是改造原有成熟的继电接触控制系统,则可由电气控制电路图很容易地转化为梯形图,生成控制程序。本节主要介绍功能流程图法。7.2.1功能流程图概述1.组成(2)有向线段和转移有向线段和转移及转移条件如图7.2所示。(3)动作说明一个步表示控制过程中的稳定状态,它可以对应一
sPLC部分控制与组态资料ppt课件.ppt
S7-200PLC基础与编程任务一西门子S7-200PLC的认识与使用1.PLC是什么——工业控制器1.2S7-200PLC的认识2.输入输出接线8DI16DI8DO(DC,ACorrelay)4DO5A4DO10A1.3S7-200系列PLC数据存储及内部元器件功能(3)位存储器M用来保存控制继电器的中间操作状态或控制信息,其地址范围为M0.0~M31.7。其作用相当于继电器控制中的中间继电器。位存储器在PLC中没有输入/输出端与之对应,其线圈的通断状态只能在程序内部用指令驱动,其触点可用于程序中。(9

PLC编程及应用全套课程ppt课件.ppt
可编程序控制器及应用目录第1章概述第1章概述1968年.美国最大的汽车制造厂家——通用汽车公司(GM)为了适应汽车型号不断更新的需要,提出了十条技术指标在社会上公开招标,制造一种新型的工业控制装置,提出了研制可编程序控制器的基本设想,即(1)能用于工业现场。(2)能改变其控制“逻辑”,而不需要变动组成它的元件和修改内部接线。(3)出现故障时易于诊断和维修。1969年,美国数字设备公司(DEC)研制出了世界上第一台PLC。并在GM公司汽车生产线上首次应用成功。(逻辑、计时、计数)1980年美国电气制造商协会

S PLC编程及应用第三版.ppt
第4章S7-1200的用户程序结构在接口区中生成局部变量,后者只能在它所在的块中使用。右键单击项目树中的FC1,单击快捷菜单中的“属性”,选中打开的对话框左边的“属性”,用复选框取消默认的属性“块的优化访问”。成功编译后接口区出现“偏移量”列,只有临时数据才有偏移量。函数各种类型的局部变量的作用如下:1)输入参数Input用于接收调用它的主调块提供的输入数据。2)输出参数Output用于将块的程序执行结果返回给主调块。3)输入_输出参数InOut的初值由主调块提供,块执行完后用同一个参数将它的值返回给主调