
基于stackelberg多步博弈的无人机协同搜索路径规划.pptx

快乐****蜜蜂

1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于stackelberg多步博弈的无人机协同搜索路径规划.pptx
添加副标题目录PART01PART02Stackelberg博弈的基本概念Stackelberg博弈在无人机协同搜索路径规划中的应用Stackelberg博弈的优势和局限性PART03无人机协同搜索路径规划的必要性基于Stackelberg多步博弈的路径规划方法路径规划的优化目标和约束条件PART04算法流程与关键技术仿真实验环境与参数设置实验结果分析与比较PART05无人机协同搜索路径规划的应用场景基于Stackelberg多步博弈的路径规划优势分析对实际应用的价值和贡献PART06基于Stackelb
基于感知-锁定-发现的多无人机博弈协同搜索方法.pdf
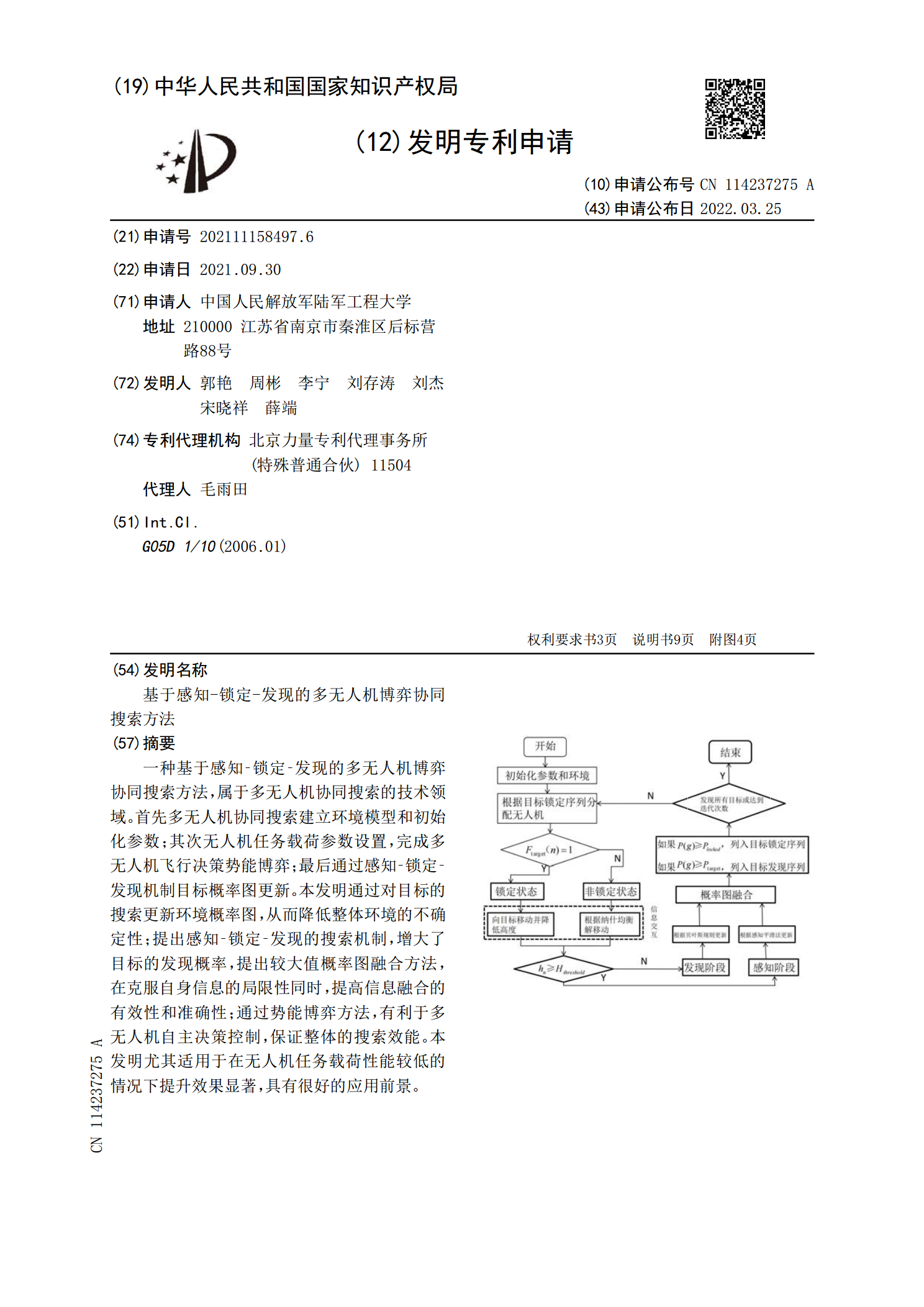
一种基于感知‑锁定‑发现的多无人机博弈协同搜索方法,属于多无人机协同搜索的技术领域。首先多无人机协同搜索建立环境模型和初始化参数;其次无人机任务载荷参数设置,完成多无人机飞行决策势能博弈;最后通过感知‑锁定‑发现机制目标概率图更新。本发明通过对目标的搜索更新环境概率图,从而降低整体环境的不确定性;提出感知‑锁定‑发现的搜索机制,增大了目标的发现概率,提出较大值概率图融合方法,在克服自身信息的局限性同时,提高信息融合的有效性和准确性;通过势能博弈方法,有利于多无人机自主决策控制,保证整体的搜索效能。本发明尤
基于多目标搜索的无人机协同轨迹智能规划.pptx
,目录PartOnePartTwo算法定义与原理算法优缺点分析适用场景与限制PartThree无人机轨迹规划的定义与分类无人机协同轨迹规划的原理与实现无人机协同轨迹规划的挑战与解决方案PartFour方法概述与流程多目标搜索算法在无人机协同轨迹规划中的应用智能优化算法的集成与实现实验验证与结果分析PartFive案例一:城市物流配送案例二:农业植保作业案例三:灾难救援行动应用前景与挑战PartSix研究结论研究不足与局限性未来研究方向与展望THANKS

无人机群协同目标搜索中的动态路径规划方法及系统.pdf
本发明公开了一种无人机群协同目标搜索中的动态路径规划方法及系统,包括:初始化搜索任务及优化算法相关参量;将搜索区域和路径进行离散化处理,基于滚动时域控制策略设计当前时刻的目标函数集合;使用麻雀算法优化当前时刻的各单目标函数,得到最优解/最劣解;基于TOPSIS法构造综合效能函数,进行目标函数集合的组合优化;以当前时刻的最优解作为下一时刻的搜索路径点,循环迭代优化直至达到终止条件,规划出无人机完整的搜索路径。本发明的无人机群协同目标搜索中的动态路径规划方法在求解质量上有着明显的优势,能够在动态环境中为无人机

基于神经网络和人工势场的协同博弈路径规划.docx
基于神经网络和人工势场的协同博弈路径规划基于神经网络和人工势场的协同博弈路径规划摘要:路径规划是无人系统领域中的核心问题之一。协同博弈路径规划能够实现多个无人系统之间的合作与竞争,并保障路径的安全与高效。本文将结合神经网络和人工势场方法,提出一种基于协同博弈的路径规划算法,用于解决多无人系统的路径规划问题。关键词:路径规划,协同博弈,神经网络,人工势场1.引言在无人系统领域中,路径规划是一项关键技术,它能够决定系统的运行效率和安全性。然而,单一无人系统的路径规划算法往往难以应对多个无人系统的协同合作与竞争