
基于感知-锁定-发现的多无人机博弈协同搜索方法.pdf

An****70

1/10

2/10
3/10
4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于感知-锁定-发现的多无人机博弈协同搜索方法.pdf
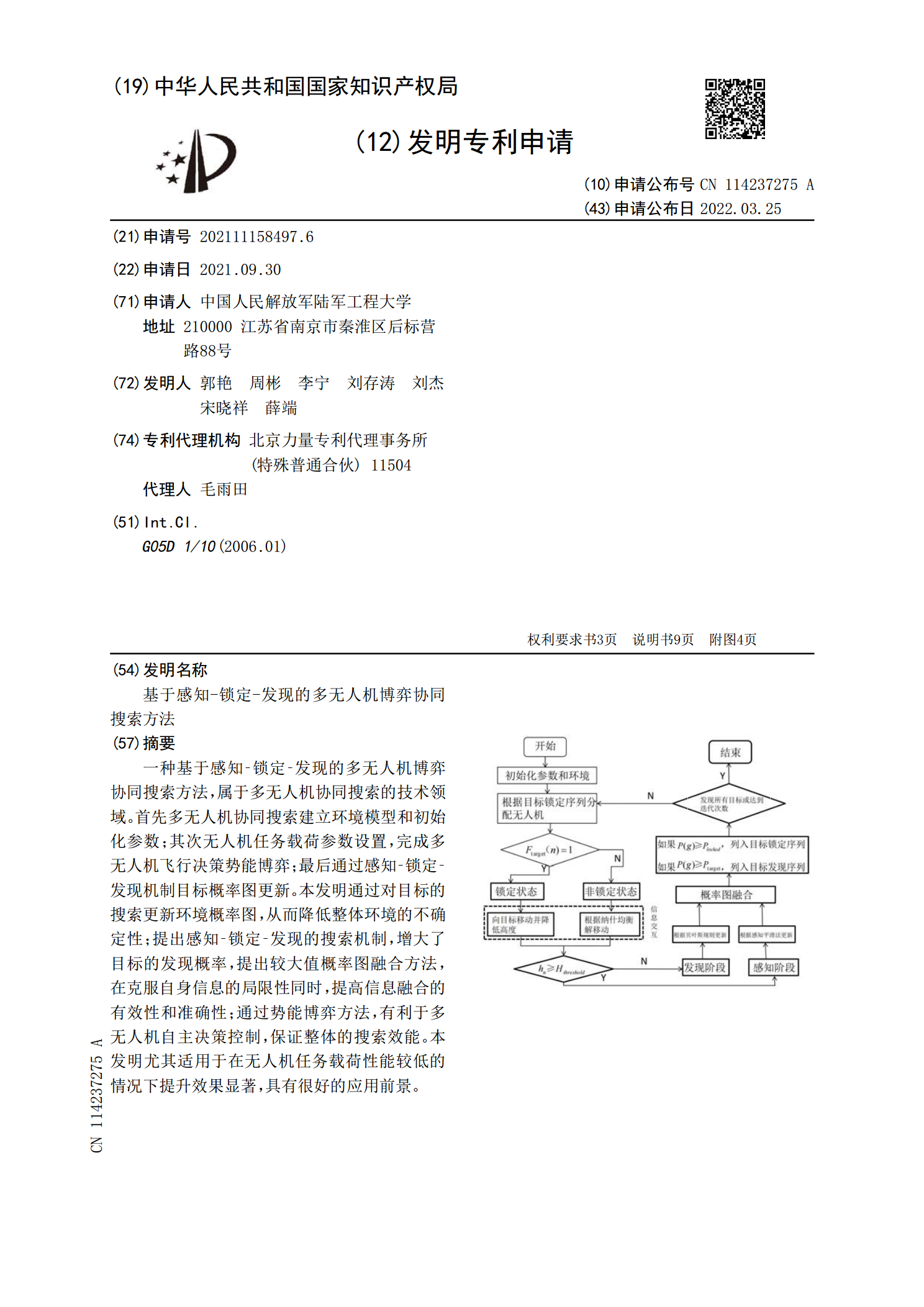
一种基于感知‑锁定‑发现的多无人机博弈协同搜索方法,属于多无人机协同搜索的技术领域。首先多无人机协同搜索建立环境模型和初始化参数;其次无人机任务载荷参数设置,完成多无人机飞行决策势能博弈;最后通过感知‑锁定‑发现机制目标概率图更新。本发明通过对目标的搜索更新环境概率图,从而降低整体环境的不确定性;提出感知‑锁定‑发现的搜索机制,增大了目标的发现概率,提出较大值概率图融合方法,在克服自身信息的局限性同时,提高信息融合的有效性和准确性;通过势能博弈方法,有利于多无人机自主决策控制,保证整体的搜索效能。本发明尤

基于随机目标的多无人机协同搜索方法研究的开题报告.docx
基于随机目标的多无人机协同搜索方法研究的开题报告一、选题背景近年来,随着无人机技术的不断发展和应用场景的扩大,无人机在搜救、灾后救援、监测等领域中得到了广泛应用。然而,当需要对一个较大的区域进行搜索时,由于无人机数量限制和搜索范围广大等问题,搜索效率较低,如何提高搜索效率成为了一个迫切需要解决的问题。因此,本课题主要研究基于随机目标的多无人机协同搜索方法,通过采用一定的随机化方法,将搜索任务分配给多架无人机,提高搜索效率和效果。二、研究内容及方法1.研究内容本课题的主要研究内容包括以下三个方面:(1)建立

面向动态目标的多无人机协同搜索方法研究.docx
面向动态目标的多无人机协同搜索方法研究随着无人机应用在多个领域的普及,无人机相关技术也在不断地发展。在无人机协同搜索领域,传统的多无人机搜索方法没有充分考虑到目标的动态性,而面向动态目标的多无人机协同搜索方法可以更加高效地完成搜索任务。一、传统多无人机搜索方法的缺陷传统的多无人机搜索方法通常采用固定模式的搜索方式,安排无人机在搜索范围内按照规定的路径进行搜索,或者对整个搜索区域进行网格化划分搜索。但这种做法存在以下问题:1.无法有效应对动态目标的搜索在一个飞行速度较慢的固定模式下进行搜索时,难以快速跟踪动

基于stackelberg多步博弈的无人机协同搜索路径规划.pptx
添加副标题目录PART01PART02Stackelberg博弈的基本概念Stackelberg博弈在无人机协同搜索路径规划中的应用Stackelberg博弈的优势和局限性PART03无人机协同搜索路径规划的必要性基于Stackelberg多步博弈的路径规划方法路径规划的优化目标和约束条件PART04算法流程与关键技术仿真实验环境与参数设置实验结果分析与比较PART05无人机协同搜索路径规划的应用场景基于Stackelberg多步博弈的路径规划优势分析对实际应用的价值和贡献PART06基于Stackelb

基于Voronoi图质心的多无人机协同区域搜索算法.docx
基于Voronoi图质心的多无人机协同区域搜索算法基于Voronoi图质心的多无人机协同区域搜索算法摘要:无人机领域的快速发展使得其在各个领域都得到广泛的应用,其中区域搜索是无人机应用的重要一环。针对多无人机协同区域搜索的问题,本文提出了一种基于Voronoi图质心的算法。该算法利用Voronoi图的性质,将区域划分为多个小区域,并利用质心的概念确定无人机的部署位置。通过计算各个小区域的质心,并根据目标密度确定无人机部署的数量和位置,实现了高效的区域搜索。关键词:无人机;区域搜索;Voronoi图;质心1