
基于参数描述的换道场景自动驾驶精确决策学习(英文).pptx

快乐****蜜蜂


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共33页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于参数描述的换道场景自动驾驶精确决策学习(英文).pptx
汇报人:CONTENTS添加章节标题参数描述方法参数选择与确定参数描述的数学模型参数描述的精度与可靠性参数描述的应用场景换道场景分析换道场景的分类与定义换道场景的交通流特性换道场景的安全性评估换道场景的驾驶行为分析自动驾驶决策学习算法基于规则的决策算法基于机器学习的决策算法基于深度学习的决策算法决策算法的性能评估与比较精确决策学习框架精确决策学习的目标与任务精确决策学习的数据集构建精确决策学习的模型训练与优化精确决策学习的实际应用与验证实验与分析实验场景与实验条件实验结果与分析结果比较与讨论实验结论与建议

一种基于深度Q学习的自动驾驶换道决策方法.pdf
一种基于深度Q学习的自动驾驶换道决策方法,属于自动驾驶技术领域。解决了现有自动驾驶车辆基于强化学习进行换道决策,由于驾驶环境状态复杂,导致学习的效率很低的问题。本发明采集目标自动驾驶车辆前后和同向左和/或右车道车辆的相对位置及与相对速度;将相对位置及与相对速度作为环境向量,输入至经Q值函数训练的全连接神经网络,获得所有换道动作的Q值估计值;判断所有换道动作是否属于当前时刻安全动作集合,提取属于当前时刻安全动作集合的换道动作;采用Argmax函数,从所述属于当前时刻安全动作集合提取Q值估计值最大的换道动作,
一种基于博弈论的港口码头面自动驾驶换道决策方法.pdf
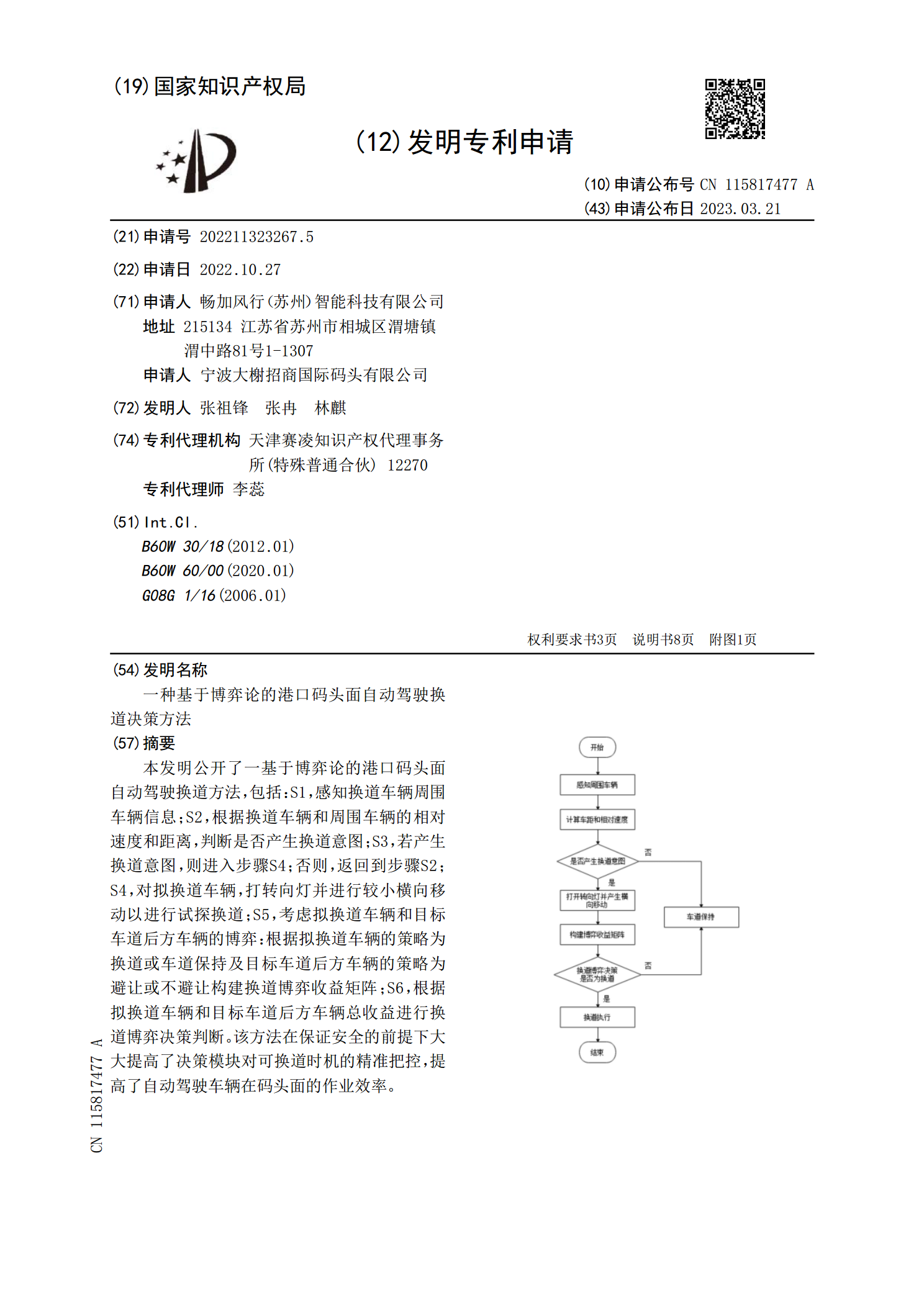
本发明公开了一基于博弈论的港口码头面自动驾驶换道方法,包括:S1,感知换道车辆周围车辆信息;S2,根据换道车辆和周围车辆的相对速度和距离,判断是否产生换道意图;S3,若产生换道意图,则进入步骤S4;否则,返回到步骤S2;S4,对拟换道车辆,打转向灯并进行较小横向移动以进行试探换道;S5,考虑拟换道车辆和目标车道后方车辆的博弈:根据拟换道车辆的策略为换道或车道保持及目标车道后方车辆的策略为避让或不避让构建换道博弈收益矩阵;S6,根据拟换道车辆和目标车道后方车辆总收益进行换道博弈决策判断。该方法在保证安全的前

基于深度残差学习的自动驾驶道路场景理解.pptx
汇报人:CONTENTS添加章节标题深度残差学习在自动驾驶中的应用深度残差学习原理自动驾驶中场景理解的重要性深度残差学习在道路场景理解中的应用案例深度残差学习在自动驾驶中的优势提高道路场景理解的准确性提升自动驾驶系统的安全性降低计算资源消耗增强模型的泛化能力深度残差学习在自动驾驶中的挑战与解决方案数据标注问题及解决方案模型训练问题及解决方案实时性要求及解决方案安全性问题及解决方案深度残差学习在自动驾驶中的未来展望结合其他先进技术提升道路场景理解能力实现更高级别的自动驾驶功能拓展到其他领域的应用面临的挑战与

基于前景理论的换道决策模型研究.docx
基于前景理论的换道决策模型研究标题:基于前景理论的换道决策模型研究摘要:前景理论是决策心理学的一个经典理论,其旨在解释人们在决策过程中的行为和决策结果。换道决策作为一种常见的交通行为,在交通安全和流畅性方面具有重要意义。本文旨在探索基于前景理论的换道决策模型,并分析其对交通流畅性和安全性的影响。1.引言交通换道决策是指在驾驶过程中,驾驶员根据交通情况选择是否进行换道行为的决策过程。换道决策的合理性直接关系到交通流畅性和安全性。前景理论为解释驾驶员在换道决策中的行为提供了新的视角。2.前景理论的基本假设前景