
智能机械臂末端高精度控制的交互系统研究.pptx

快乐****蜜蜂

1/10
2/10

3/10
4/10
5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
智能机械臂末端高精度控制的交互系统研究.pptx
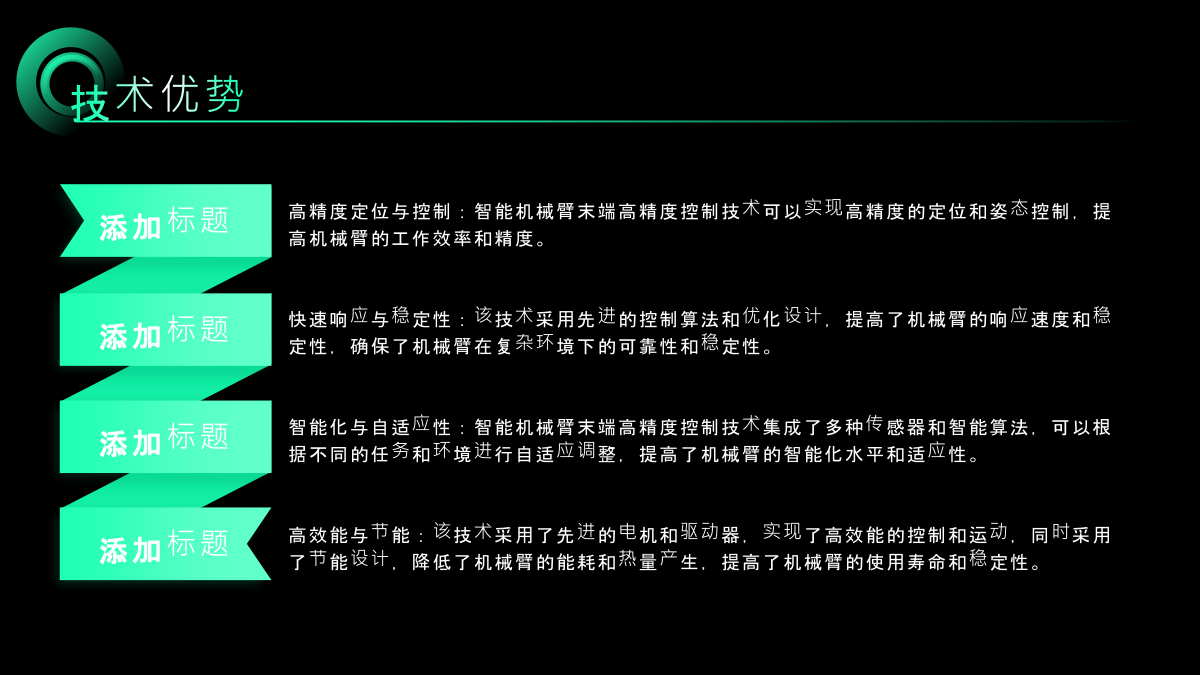
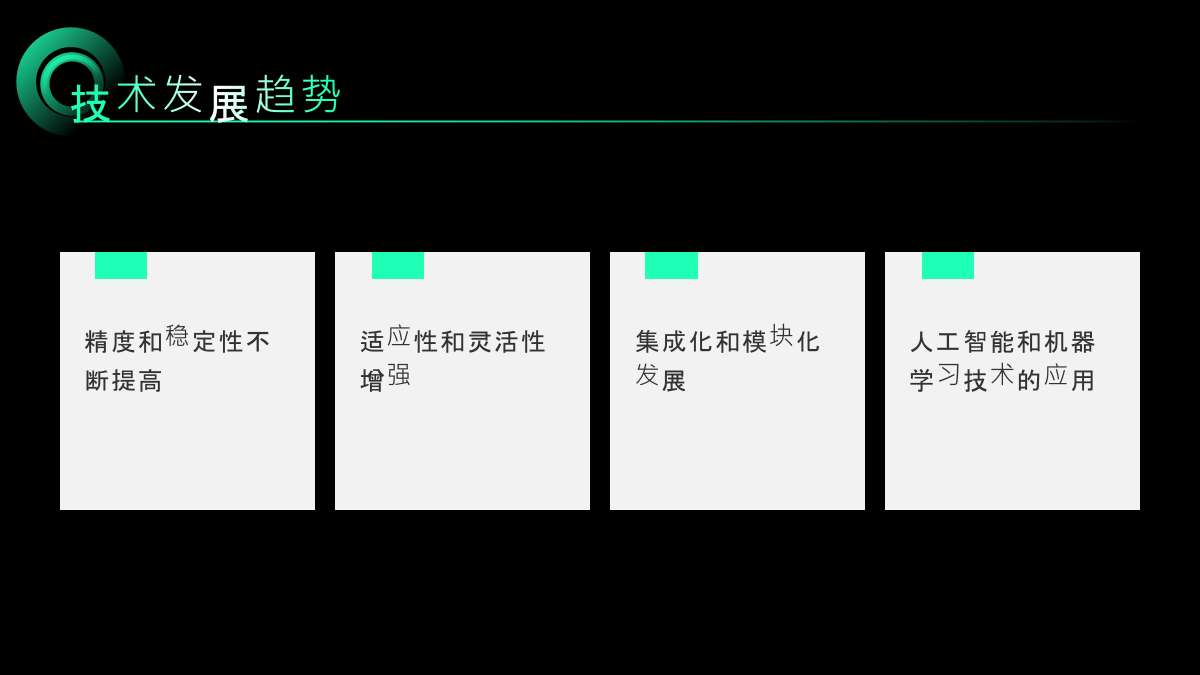
汇报人:CONTENTSPARTONEPARTTWO技术原理技术优势技术应用场景技术发展趋势PARTTHREE交互系统概述交互方式及实现原理交互系统应用场景交互系统发展趋势PARTFOUR结合方式及实现原理结合的优势及应用场景结合的挑战与解决方案结合的发展趋势PARTFIVE应用案例一:智能机械臂在工业制造中的应用应用案例二:智能机械臂在医疗领域的应用应用案例三:智能机械臂在航空航天领域的应用应用案例四:智能机械臂在服务领域的应用PARTSIX未来展望研究方向一:提高控制精度与稳定性的技术研究研究方向二:

基于脑电控制的智能机械臂控制系统研究.docx
基于脑电控制的智能机械臂控制系统研究基于脑电控制的智能机械臂控制系统研究摘要:脑电控制技术是一种非常有前景且具有广泛应用领域的技术,它可以将人脑的电信号转化为控制指令,实现对外部设备的控制。本文以探讨基于脑电控制技术的智能机械臂控制系统为主题,介绍了该系统的基本原理和关键技术,以及面临的挑战和发展方向。1.引言机械臂作为一种重要的工业自动化设备,广泛应用于生产线上的加工和装配等任务。传统的机械臂控制方式主要是通过预先编程或者通过遥控器进行控制,用户面临着复杂的操作步骤和技术难题。而脑电控制技术的出现,为实

基于阻抗控制的机械臂末端工具的柔顺控制.docx
基于阻抗控制的机械臂末端工具的柔顺控制基于阻抗控制的机械臂末端工具的柔顺控制摘要:随着自动化技术的不断发展,机械臂在工业生产、医疗护理、服务行业等领域得到广泛应用。对于柔性工作环境中的机械臂应用来说,柔顺控制是一种重要的控制方式。本文主要介绍了基于阻抗控制的机械臂末端工具的柔顺控制方法,包括控制框架、控制算法以及实验验证,旨在提高机械臂在柔性工作环境中的控制精度和稳定性。关键词:机械臂;柔顺控制;阻抗控制;柔性工作环境引言:机械臂是一种重要的工业自动化设备,广泛应用于汽车制造、电子组装、物流仓储等领域。传
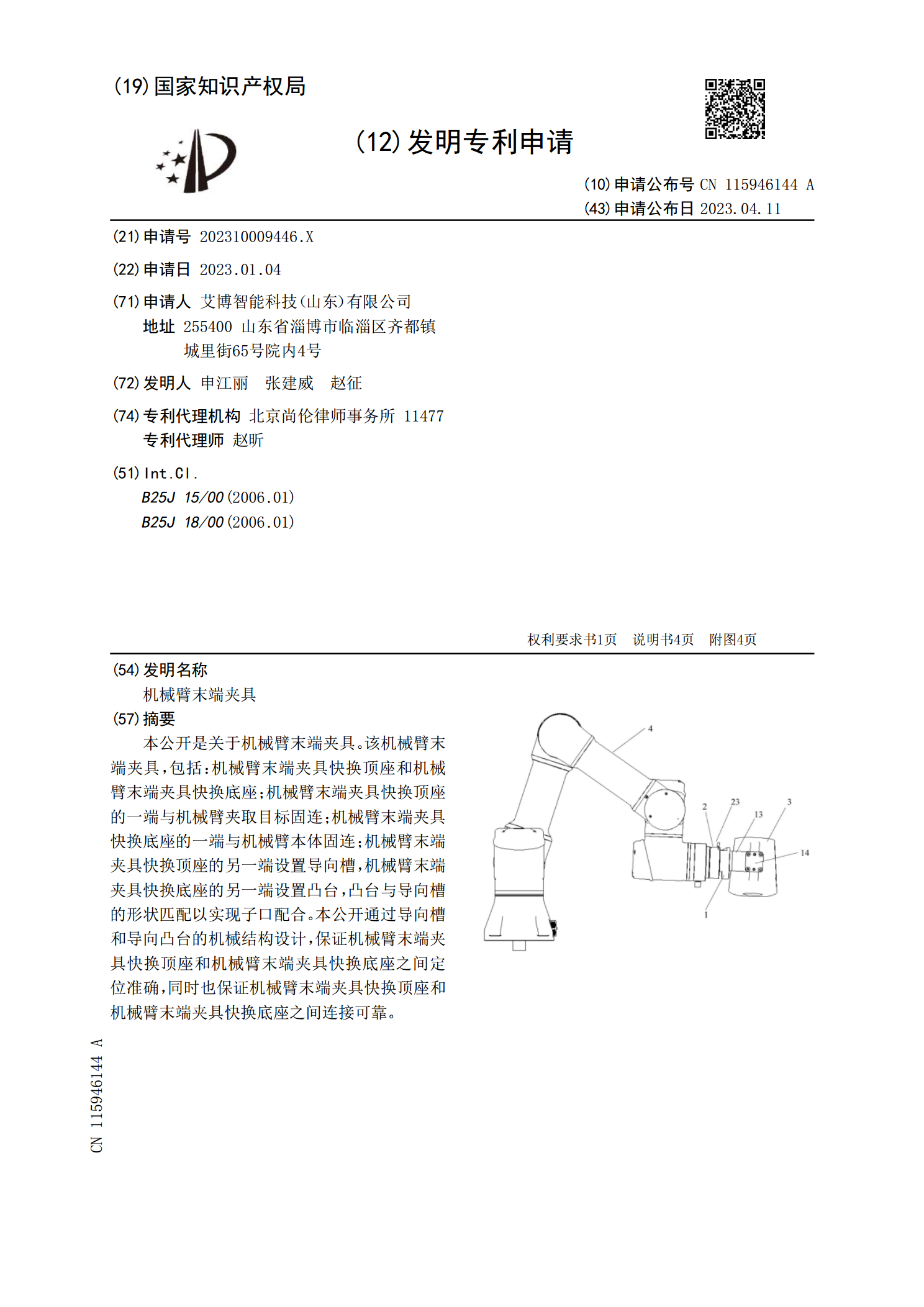
机械臂末端夹具.pdf
本公开是关于机械臂末端夹具。该机械臂末端夹具,包括:机械臂末端夹具快换顶座和机械臂末端夹具快换底座;机械臂末端夹具快换顶座的一端与机械臂夹取目标固连;机械臂末端夹具快换底座的一端与机械臂本体固连;机械臂末端夹具快换顶座的另一端设置导向槽,机械臂末端夹具快换底座的另一端设置凸台,凸台与导向槽的形状匹配以实现子口配合。本公开通过导向槽和导向凸台的机械结构设计,保证机械臂末端夹具快换顶座和机械臂末端夹具快换底座之间定位准确,同时也保证机械臂末端夹具快换顶座和机械臂末端夹具快换底座之间连接可靠。

机械臂臂杆刚度主动控制下的末端振动特性研究.docx
机械臂臂杆刚度主动控制下的末端振动特性研究摘要:机械臂在工业生产和服务领域中扮演着重要的角色,其精准控制和稳定性是影响其工作性能的关键因素之一。机械臂臂杆刚度是影响机械臂末端振动特性的重要参数之一。本文通过对机械臂臂杆刚度主动控制下的末端振动特性进行研究,探讨了机械臂工作中可能出现的振动问题,并提出了一种刚度控制策略来减少末端振动和提高机械臂的性能。关键词:机械臂,刚度主动控制,末端振动特性,刚度控制策略1.引言机械臂作为一种重要的工业机器人,广泛应用于制造业、装配线、物流、医疗等领域。机械臂的工作性能直