
基于脑电控制的智能机械臂控制系统研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于脑电控制的智能机械臂控制系统研究.docx
基于脑电控制的智能机械臂控制系统研究基于脑电控制的智能机械臂控制系统研究摘要:脑电控制技术是一种非常有前景且具有广泛应用领域的技术,它可以将人脑的电信号转化为控制指令,实现对外部设备的控制。本文以探讨基于脑电控制技术的智能机械臂控制系统为主题,介绍了该系统的基本原理和关键技术,以及面临的挑战和发展方向。1.引言机械臂作为一种重要的工业自动化设备,广泛应用于生产线上的加工和装配等任务。传统的机械臂控制方式主要是通过预先编程或者通过遥控器进行控制,用户面临着复杂的操作步骤和技术难题。而脑电控制技术的出现,为实

基于脑电控制的智能机械臂控制系统的研究.docx
基于脑电控制的智能机械臂控制系统的研究基于脑电控制的智能机械臂控制系统的研究摘要:随着神经科学和机器人技术的发展,基于脑电控制的智能机械臂控制系统成为了研究的热点。本论文首先介绍了脑电控制的基本原理,然后介绍了智能机械臂控制系统的发展和应用领域。接着,论文详细介绍了基于脑电控制的智能机械臂控制系统的原理和构成,包括信号采集、信号处理和控制方法。最后,论文讨论了该系统的应用前景和存在的挑战,并给出了未来的发展方向。关键词:脑电控制、智能机械臂、信号采集、信号处理、控制方法一、引言机器人技术的快速发展为社会带

基于三视点标定的机械臂智能控制.docx
基于三视点标定的机械臂智能控制基于三视点标定的机械臂智能控制摘要:随着智能机械臂技术的发展,机械臂在各个领域得到越来越广泛的应用。其中,基于三视点标定的机械臂智能控制成为研究的热点。本文介绍了三视点标定技术在机械臂控制中的应用以及相应的算法。通过三视点标定,能够实现机械臂在复杂环境下的精确定位和运动控制。本文分析了三视点标定的原理和方法,并介绍了利用三视点标定进行机械臂轨迹规划和控制的具体步骤。最后,通过实验验证了基于三视点标定的机械臂智能控制的有效性和鲁棒性。关键词:机械臂、智能控制、三视点标定、精确定
智能机械臂末端高精度控制的交互系统研究.pptx
汇报人:CONTENTSPARTONEPARTTWO技术原理技术优势技术应用场景技术发展趋势PARTTHREE交互系统概述交互方式及实现原理交互系统应用场景交互系统发展趋势PARTFOUR结合方式及实现原理结合的优势及应用场景结合的挑战与解决方案结合的发展趋势PARTFIVE应用案例一:智能机械臂在工业制造中的应用应用案例二:智能机械臂在医疗领域的应用应用案例三:智能机械臂在航空航天领域的应用应用案例四:智能机械臂在服务领域的应用PARTSIX未来展望研究方向一:提高控制精度与稳定性的技术研究研究方向二:
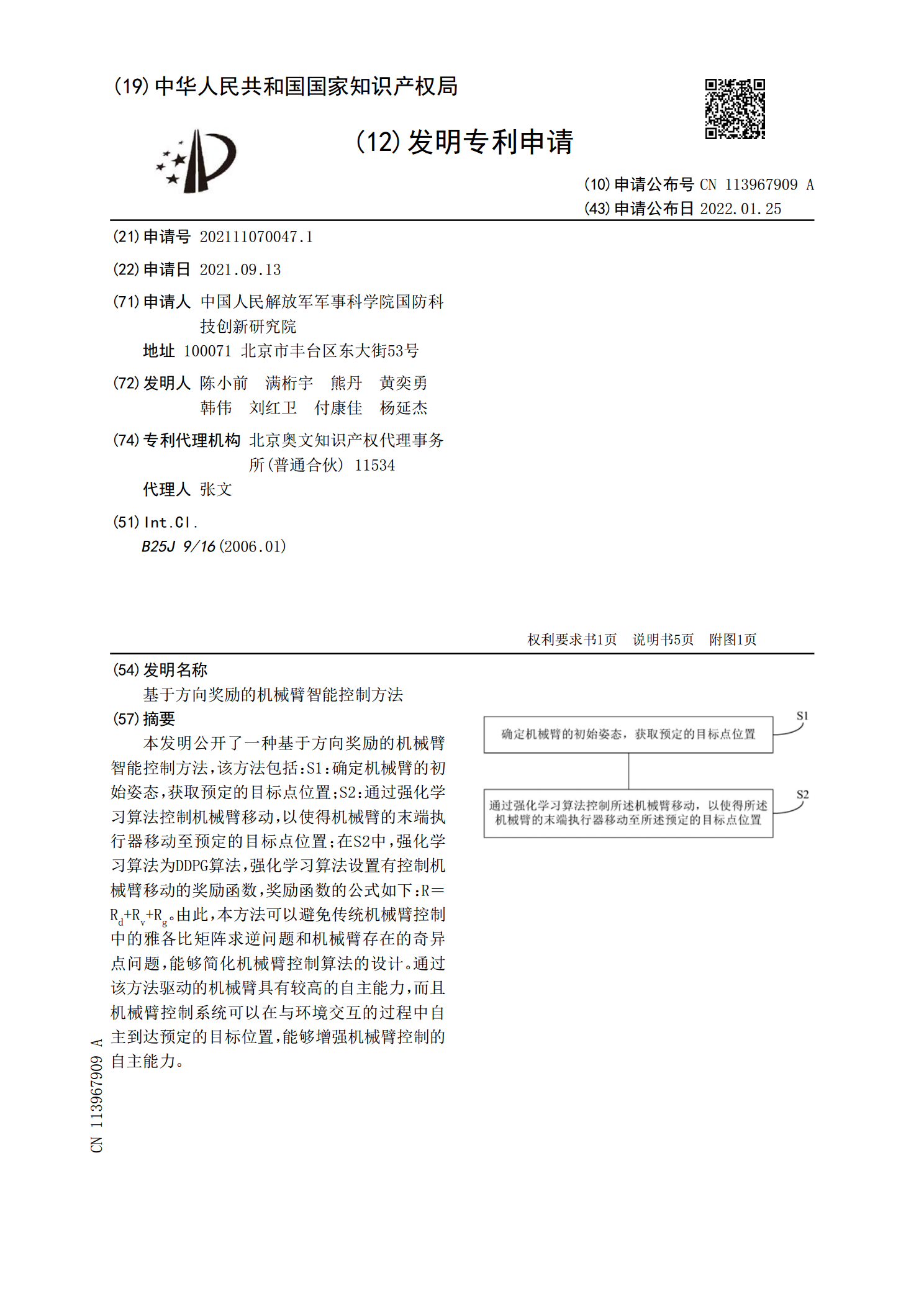
基于方向奖励的机械臂智能控制方法.pdf
本发明公开了一种基于方向奖励的机械臂智能控制方法,该方法包括:S1:确定机械臂的初始姿态,获取预定的目标点位置;S2:通过强化学习算法控制机械臂移动,以使得机械臂的末端执行器移动至预定的目标点位置;在S2中,强化学习算法为DDPG算法,强化学习算法设置有控制机械臂移动的奖励函数,奖励函数的公式如下:R=R