
四轮转向智能车辆路径跟踪控制策略研究.pptx

快乐****蜜蜂

1/10
2/10

3/10

4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
四轮转向智能车辆路径跟踪控制策略研究.pptx
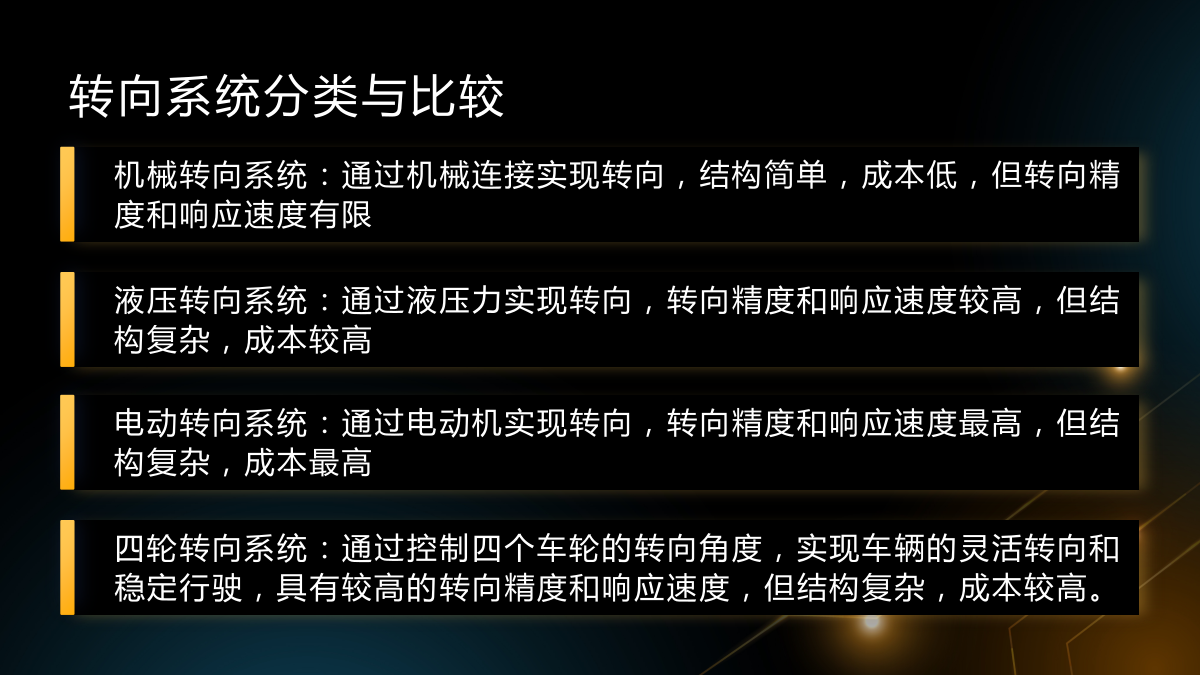
,目录PartOnePartTwo车辆结构与特点转向系统分类与比较四轮转向技术的优势与挑战PartThree路径跟踪控制策略原理传统控制策略及其优缺点现代控制策略及其优缺点控制策略比较与选择PartFour算法设计思路与原则算法框架与流程算法关键技术实现算法性能评估与优化PartFive实验平台搭建与测试环境实验方案设计与实施实验结果分析结果对比与讨论PartSix研究成果总结对未来研究的建议与展望THANKS

基于LQR的智能车辆路径跟踪控制研究.docx
基于LQR的智能车辆路径跟踪控制研究智能车辆路径跟踪控制是智能交通系统研究的重要领域之一。在现代交通系统中,路径跟踪控制的效果直接影响着车辆的安全性、稳定性和舒适性。本文将以基于线性二次调节器(LQR)的智能车辆路径跟踪控制研究为题,探讨该控制方法在路径跟踪中的应用。首先,我们需要明确路径跟踪控制的目标。路径跟踪控制的主要目标是使车辆能够按照给定的路径精确地行驶,同时保持良好的稳定性和舒适性。为了实现这一目标,研究者们提出了众多的路径跟踪控制方法,其中LQR是其中一种常用的方法。LQR是一种优化控制方法,

基于LQR的智能车辆路径跟踪控制研究.docx
基于LQR的智能车辆路径跟踪控制研究引言车辆是人类交通工具的重要组成部分之一,它的安全性、效率和智能化水平,直接关系到交通运输的发展和进步。智能车辆是近年来交通领域发展的热点和重点,其引领着行业的技术革新和发展。其中,路径跟踪控制技术是智能车辆关键技术之一,在完善车辆自动驾驶功能和提高车辆行驶安全性上具有重要作用。本文旨在探讨基于LQR的智能车辆路径跟踪控制,并结合实际案例进行论述。一、智能车辆路径跟踪控制技术研究1.1路径规划智能车辆需要进行路径规划,才能确定前进方向和选择行驶路线。路径规划是通过车辆传

智能车线控主动转向与路径跟踪控制研究.docx
智能车线控主动转向与路径跟踪控制研究智能车线控主动转向与路径跟踪控制研究引言:随着科技的不断发展,智能车技术正在逐渐成为研究和应用的热点领域。智能车的线控主动转向和路径跟踪控制是智能车技术中的重要组成部分,对于实现智能车的安全、高效驾驶具有重要的意义。1.智能车线控主动转向1.1线控主动转向的概念和原理智能车的线控主动转向是指通过车辆内的传感器和控制系统,对车辆转向过程进行实时监测和控制,实现转向的快速、准确和平稳。1.2线控主动转向的技术方法线控主动转向技术可以通过多种方式实现,包括使用电动助力转向系统

考虑路面影响的智能车辆路径跟踪控制研究.pptx
汇报人:目录PARTONEPARTTWO不同路面类型对车辆行驶性能的影响路面特征对车辆动力学模型的影响路面条件对车辆控制系统设计的要求PARTTHREE基于神经网络的路径跟踪控制算法考虑路面附着系数的路径跟踪控制算法基于模糊逻辑的路径跟踪控制算法算法比较与优化PARTFOUR路面信息感知技术路面信息融合处理方法实时路面状况评估路面信息数据库的建立与更新PARTFIVE实验场景设计与搭建实验过程与数据采集性能评估指标与方法实验结果分析与讨论PARTSIX智能车辆在复杂路面条件下的应用前景技术挑战与解决方案未