
多视角沙姆成像的高精度结构光三维测量方法.pptx

快乐****蜜蜂


1/10
2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

多视角沙姆成像的高精度结构光三维测量方法.pptx
添加副标题目录PART01PART02沙姆成像原理简介多视角沙姆成像的优势结构光三维测量的应用场景PART03结构光投影技术三维重建算法测量精度提升策略实验验证与结果分析PART04相机标定与优化图像拼接与融合算法实时数据处理与传输实验结果与性能评估PART05工业检测中的难点与需求多视角沙姆成像在工业检测中的优势实际应用案例与效果分析对工业检测领域的贡献与前景展望PART06算法优化与改进硬件升级与性能提升应用领域的拓展与跨界融合对未来科技发展的影响与价值感谢您的观看
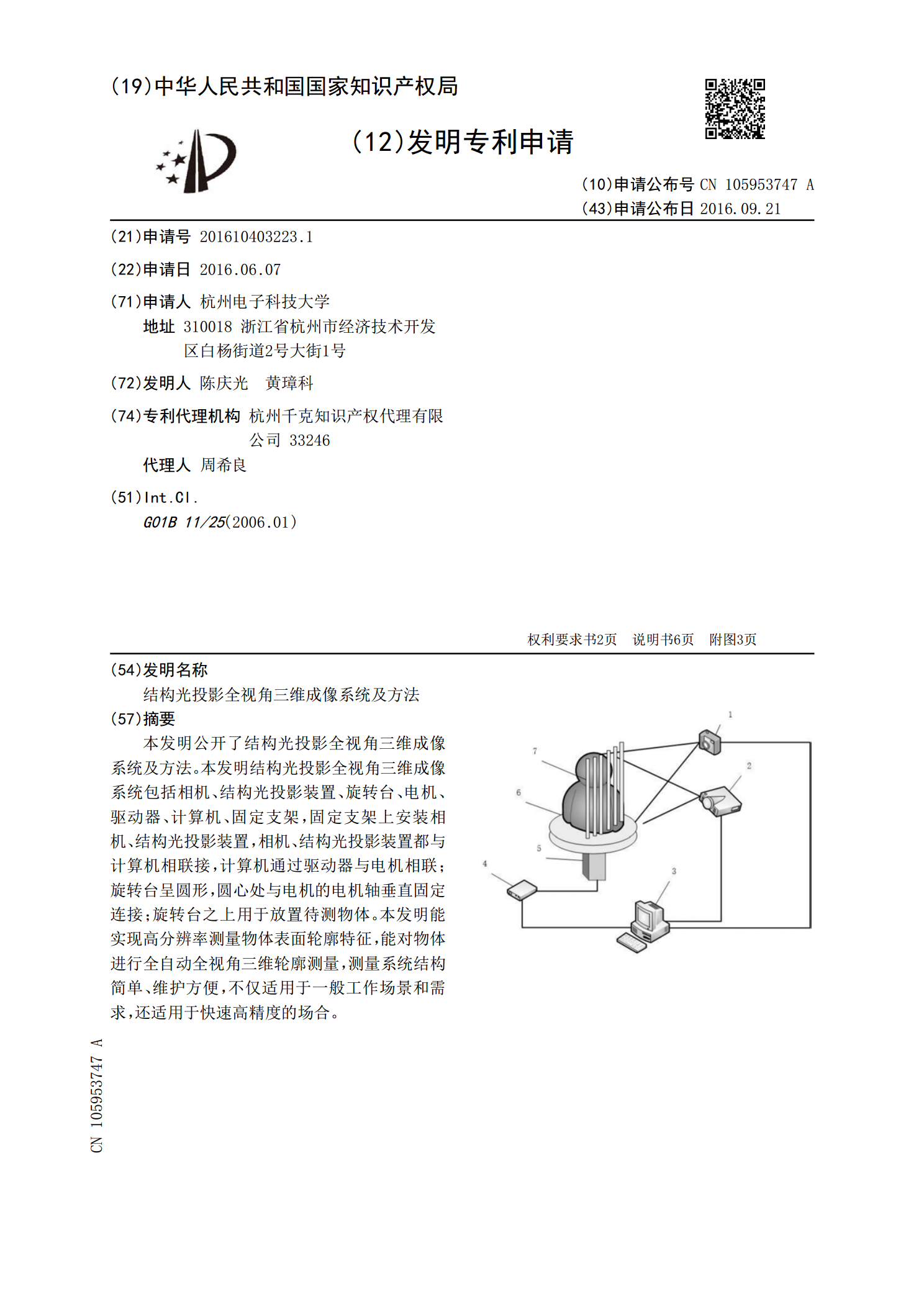
结构光投影全视角三维成像系统及方法.pdf
本发明公开了结构光投影全视角三维成像系统及方法。本发明结构光投影全视角三维成像系统包括相机、结构光投影装置、旋转台、电机、驱动器、计算机、固定支架,固定支架上安装相机、结构光投影装置,相机、结构光投影装置都与计算机相联接,计算机通过驱动器与电机相联;旋转台呈圆形,圆心处与电机的电机轴垂直固定连接;旋转台之上用于放置待测物体。本发明能实现高分辨率测量物体表面轮廓特征,能对物体进行全自动全视角三维轮廓测量,测量系统结构简单、维护方便,不仅适用于一般工作场景和需求,还适用于快速高精度的场合。
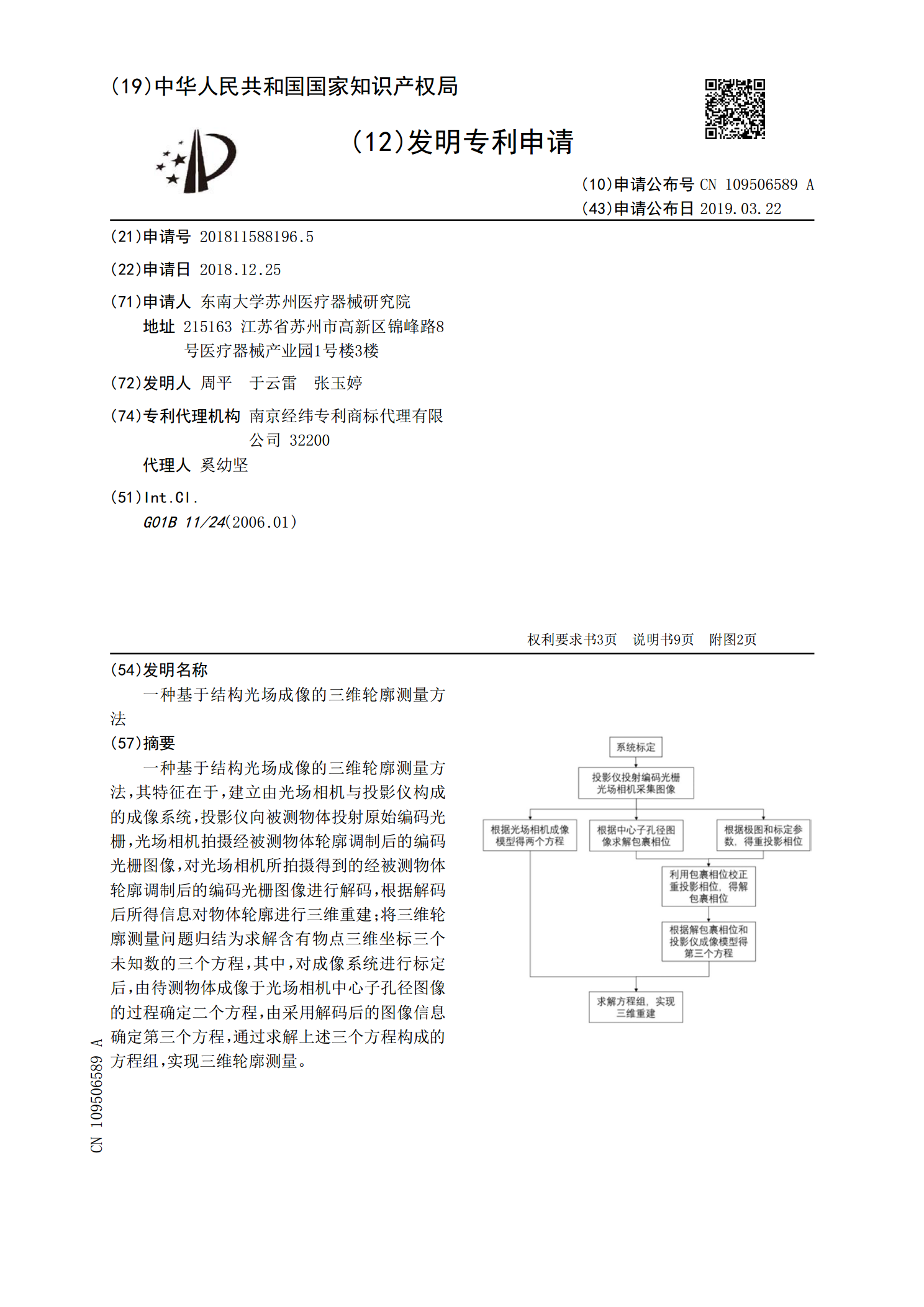
一种基于结构光场成像的三维轮廓测量方法.pdf
一种基于结构光场成像的三维轮廓测量方法,其特征在于,建立由光场相机与投影仪构成的成像系统,投影仪向被测物体投射原始编码光栅,光场相机拍摄经被测物体轮廓调制后的编码光栅图像,对光场相机所拍摄得到的经被测物体轮廓调制后的编码光栅图像进行解码,根据解码后所得信息对物体轮廓进行三维重建;将三维轮廓测量问题归结为求解含有物点三维坐标三个未知数的三个方程,其中,对成像系统进行标定后,由待测物体成像于光场相机中心子孔径图像的过程确定二个方程,由采用解码后的图像信息确定第三个方程,通过求解上述三个方程构成的方程组,实现三

多线结构光自适应三维测量方法及重构研究.pptx
汇报人:目录PARTONEPARTTWO研究背景研究意义研究目的与问题PARTTHREE结构光测量原理多线结构光测量方法自适应控制算法实验结果与分析PARTFOUR三维重构基本原理三维重建算法实验结果与分析算法性能评估PARTFIVE在工业检测领域的应用在机器人视觉领域的应用在虚拟现实与游戏开发领域的应用在医学影像处理领域的应用PARTSIX研究结论研究不足与展望THANKYOU

多视角结构光三维扫描系统标定及配准方法研究.docx
多视角结构光三维扫描系统标定及配准方法研究标题:多视角结构光三维扫描系统标定及配准方法研究摘要:随着三维重建技术在各个领域的广泛应用,结构光三维扫描系统作为一种常用的三维重建技术逐渐受到关注。然而,结构光三维扫描系统在实际应用中存在标定不准确和配准不精确的问题。为了解决这些问题,本文研究了多视角结构光三维扫描系统的标定和配准方法,通过对系统内外参数的准确估计,实现了高精度的三维重建。关键词:多视角结构光、三维重建、标定、配准1.引言三维重建技术在现实生活中有着广泛的应用,如工业检测、医疗影像、文物保护等领