
一种基于结构光场成像的三维轮廓测量方法.pdf

宏硕****mo

1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于结构光场成像的三维轮廓测量方法.pdf
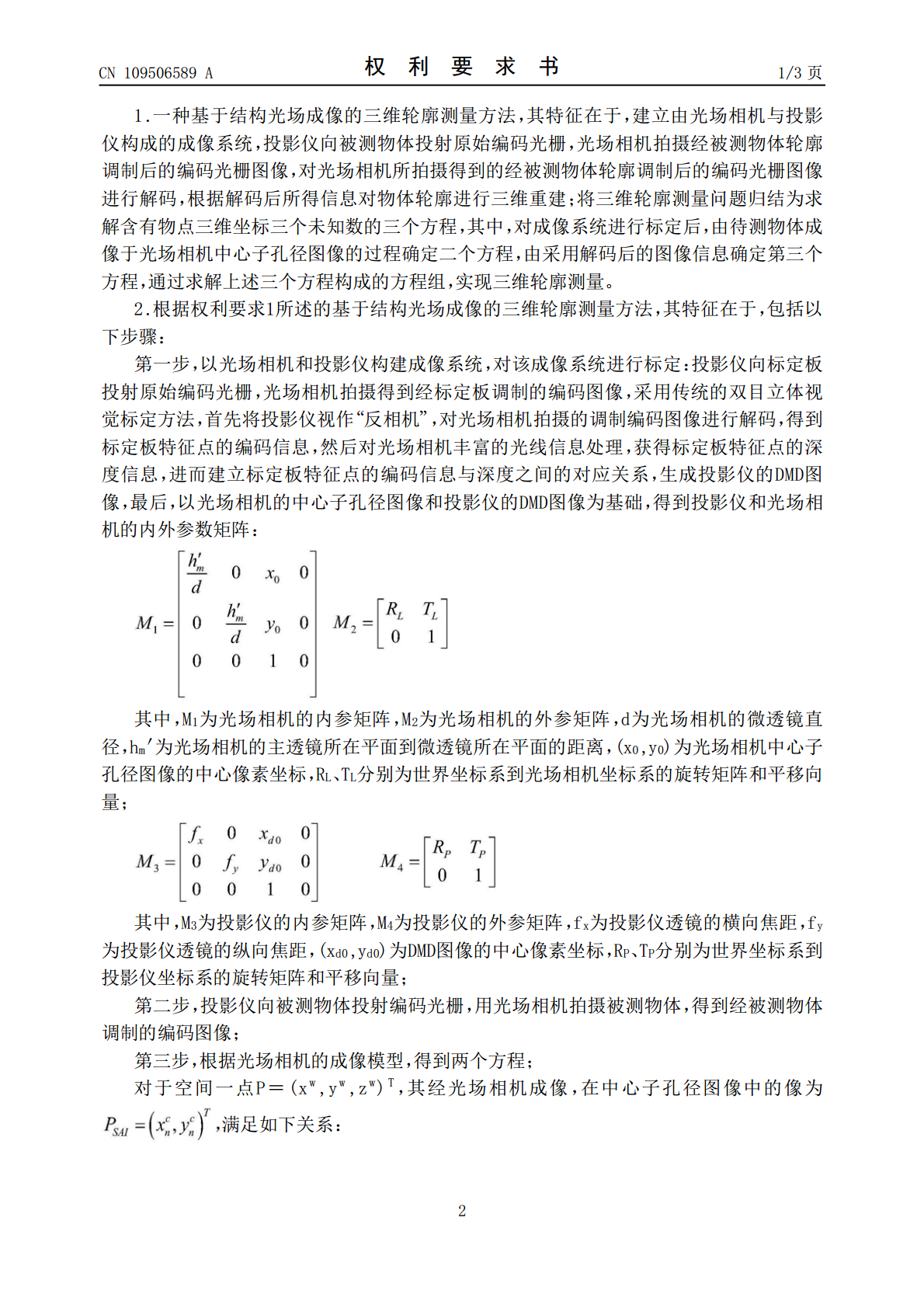
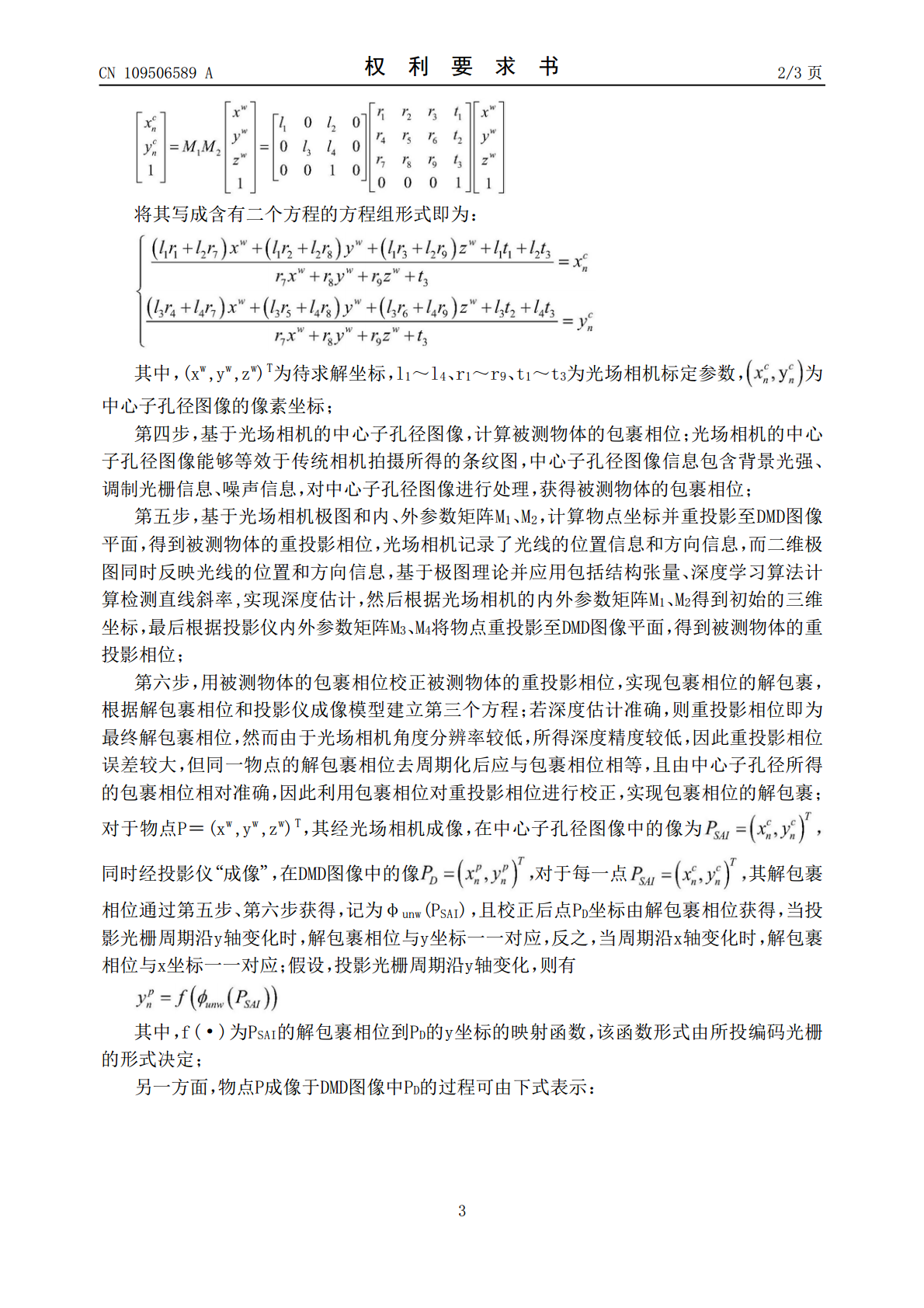
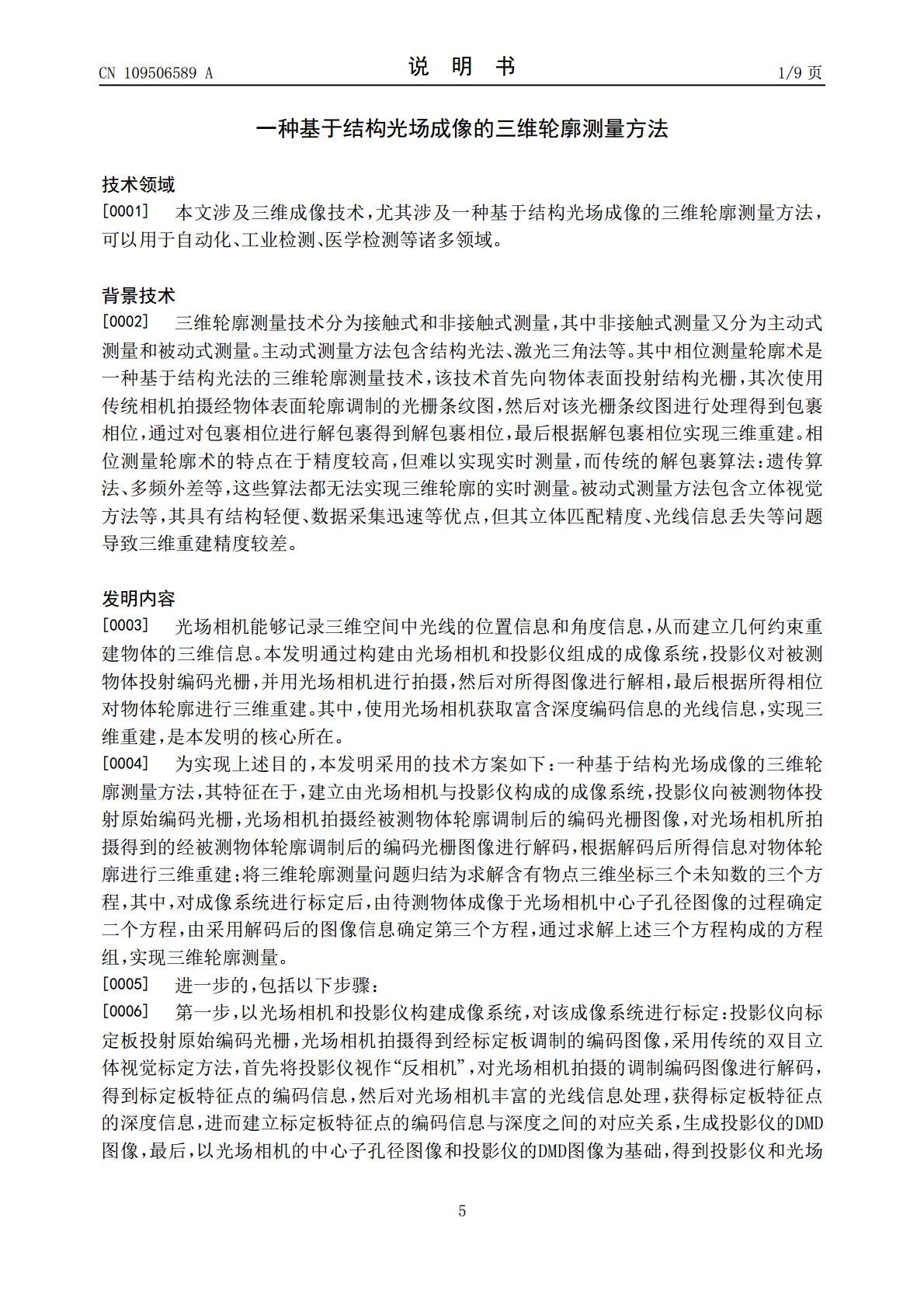
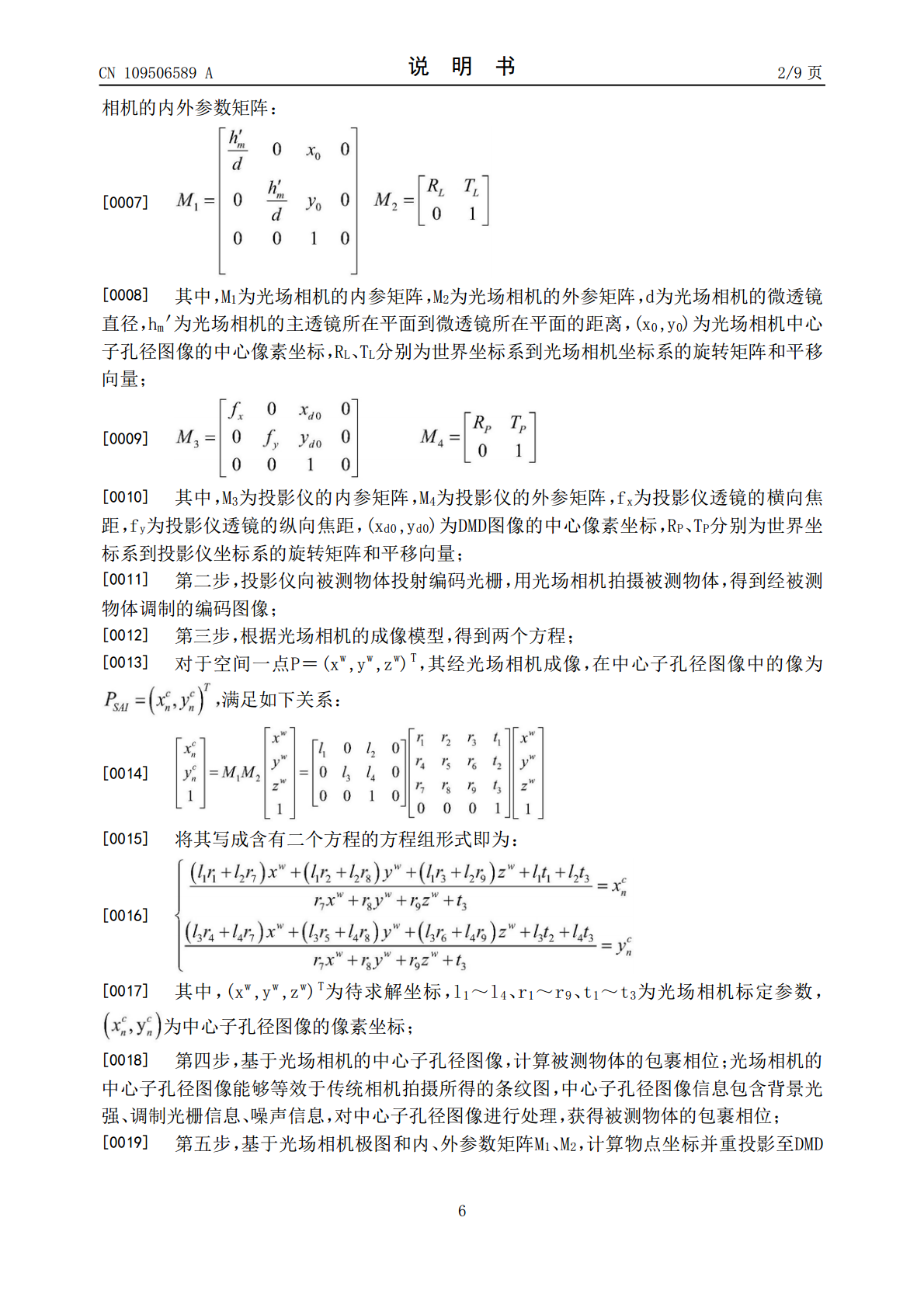
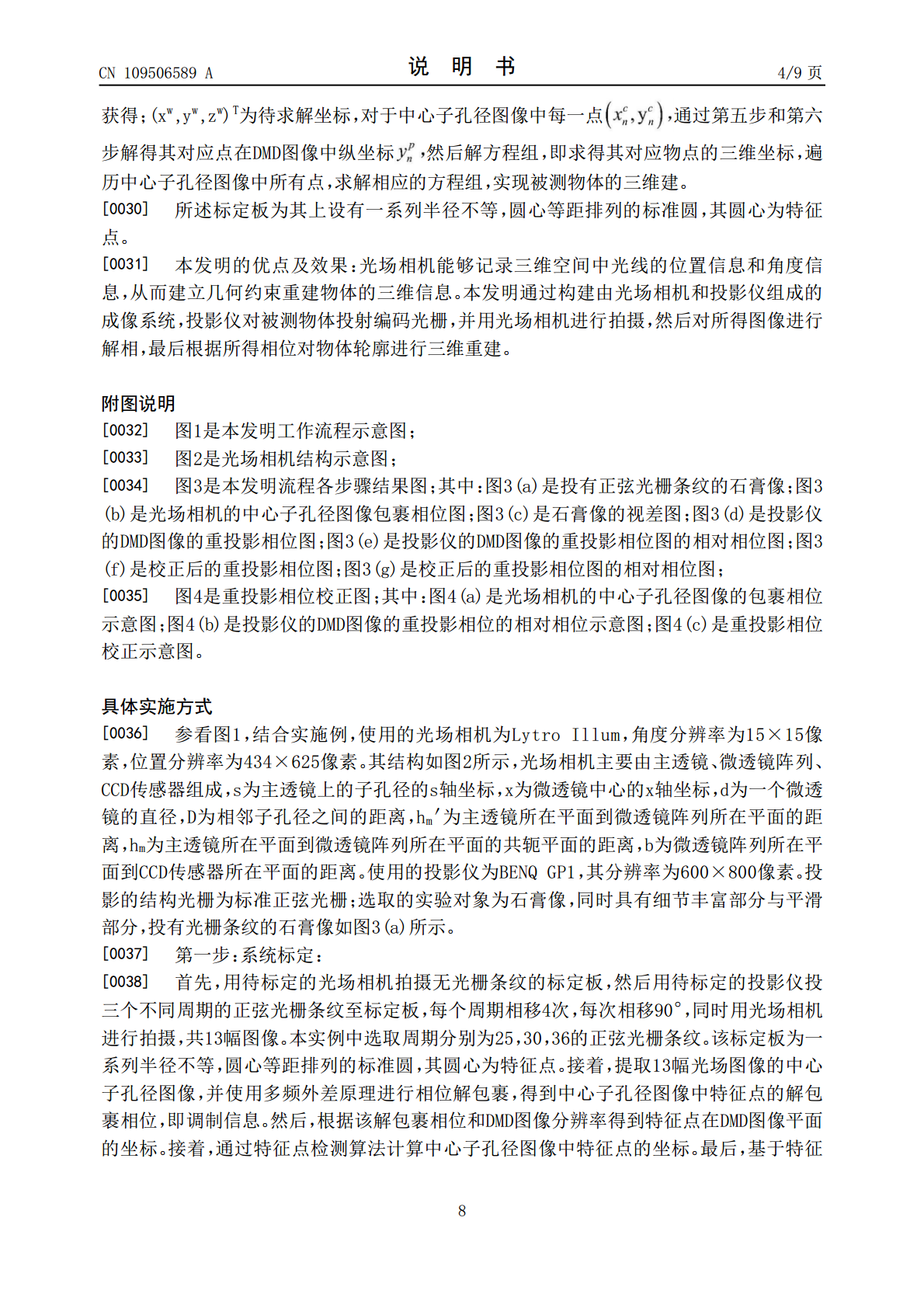
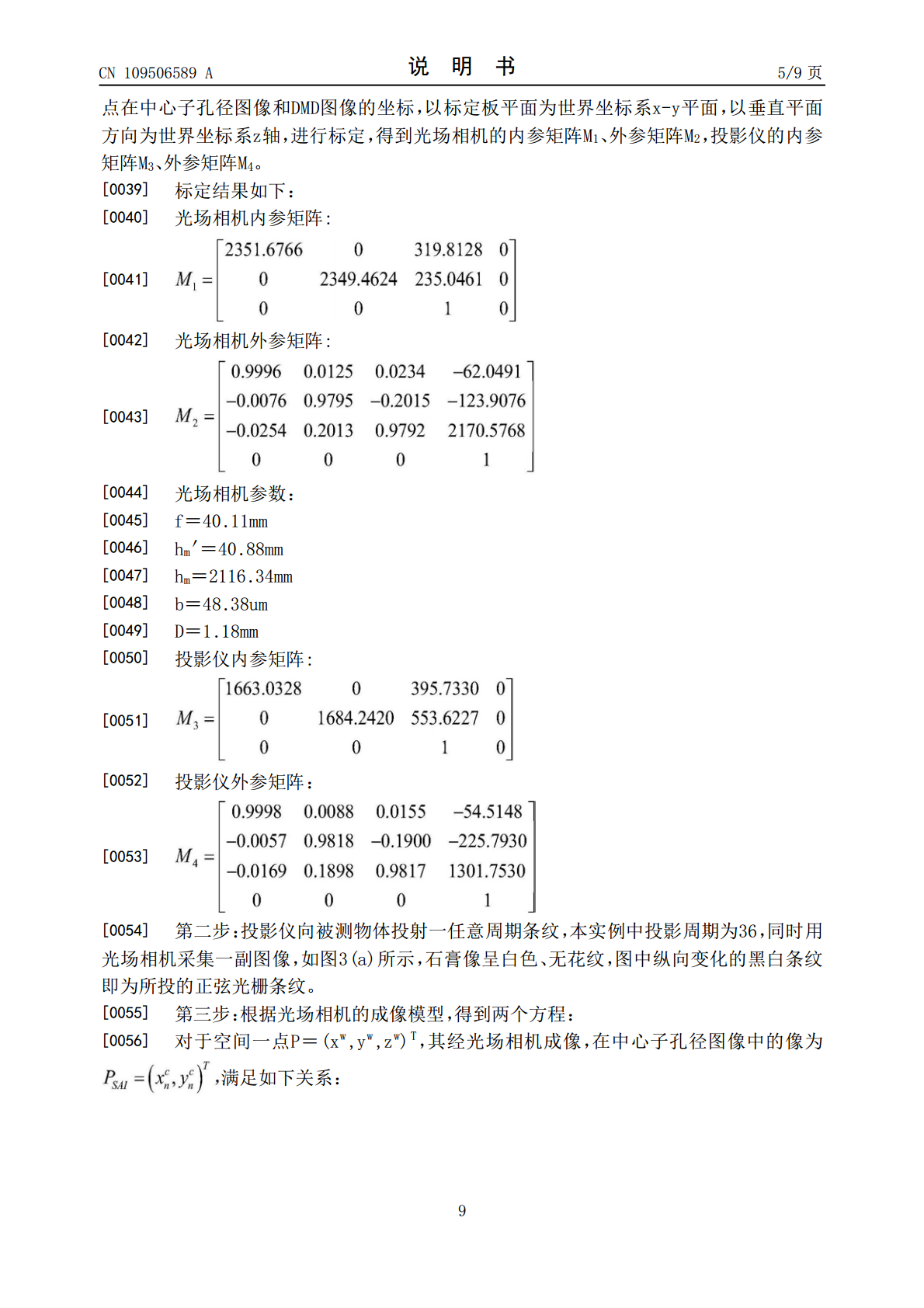
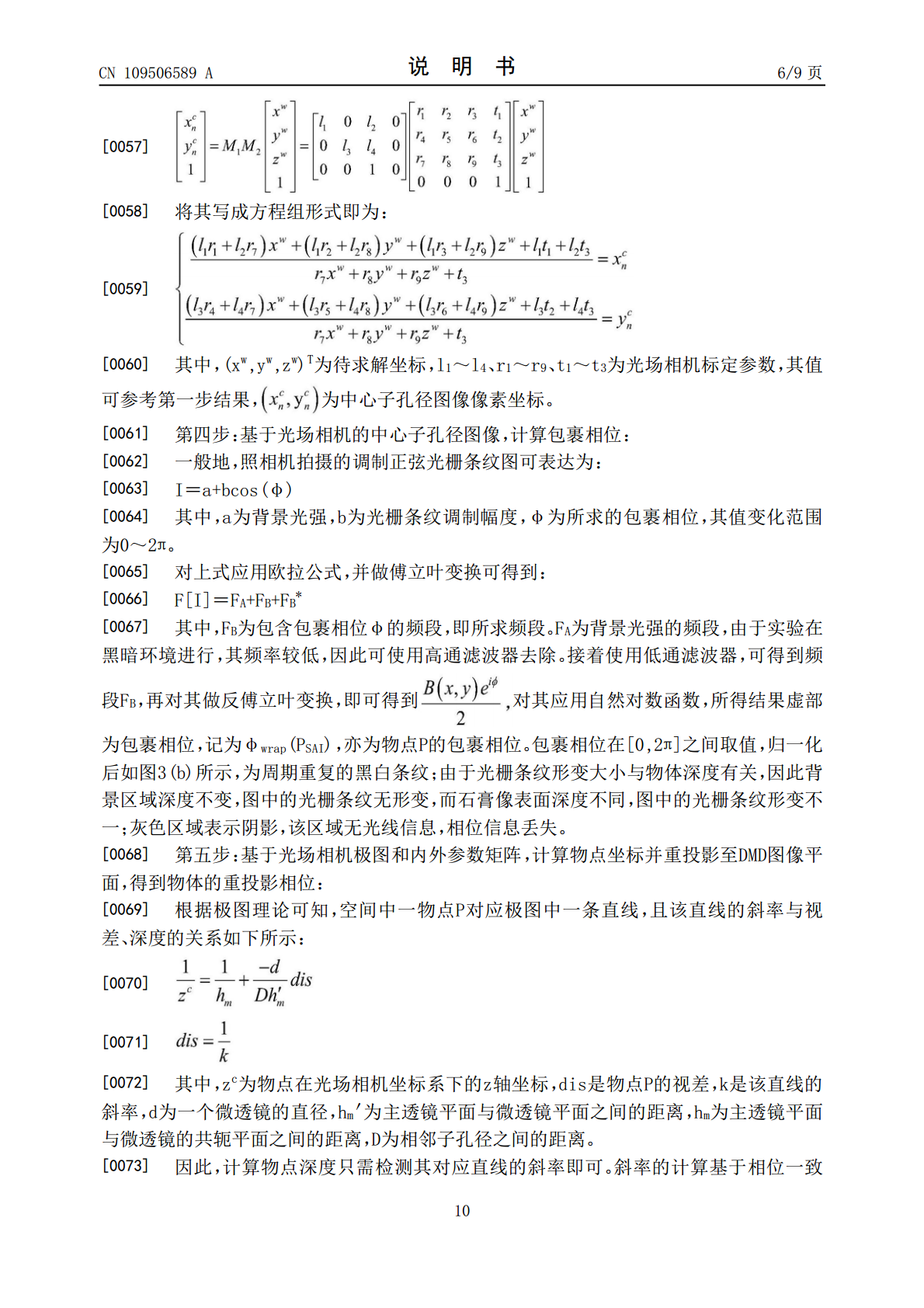
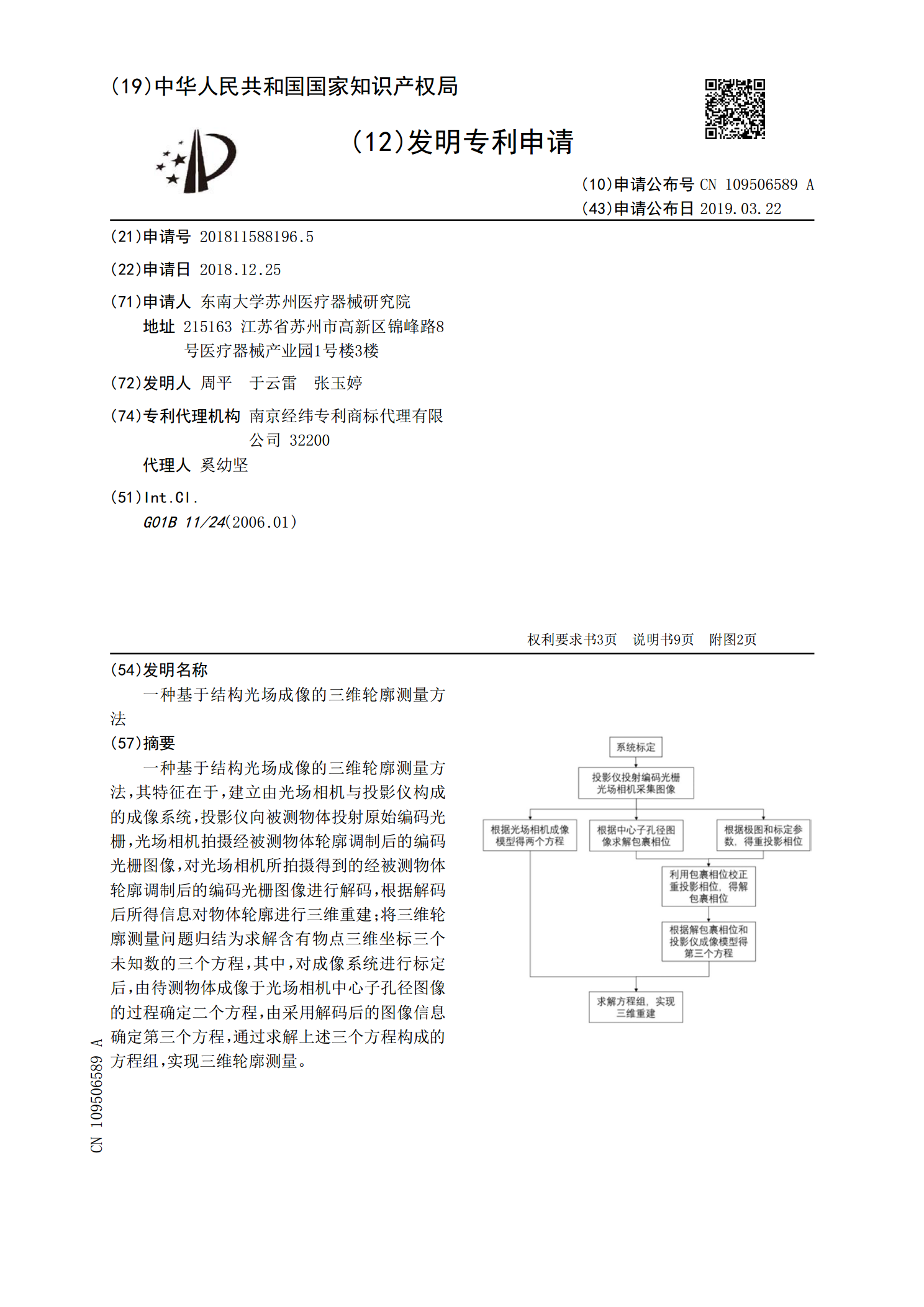
一种基于结构光场成像的三维轮廓测量方法,其特征在于,建立由光场相机与投影仪构成的成像系统,投影仪向被测物体投射原始编码光栅,光场相机拍摄经被测物体轮廓调制后的编码光栅图像,对光场相机所拍摄得到的经被测物体轮廓调制后的编码光栅图像进行解码,根据解码后所得信息对物体轮廓进行三维重建;将三维轮廓测量问题归结为求解含有物点三维坐标三个未知数的三个方程,其中,对成像系统进行标定后,由待测物体成像于光场相机中心子孔径图像的过程确定二个方程,由采用解码后的图像信息确定第三个方程,通过求解上述三个方程构成的方程组,实现三
一种基于光场的物体表面轮廓三维成像方法.pdf
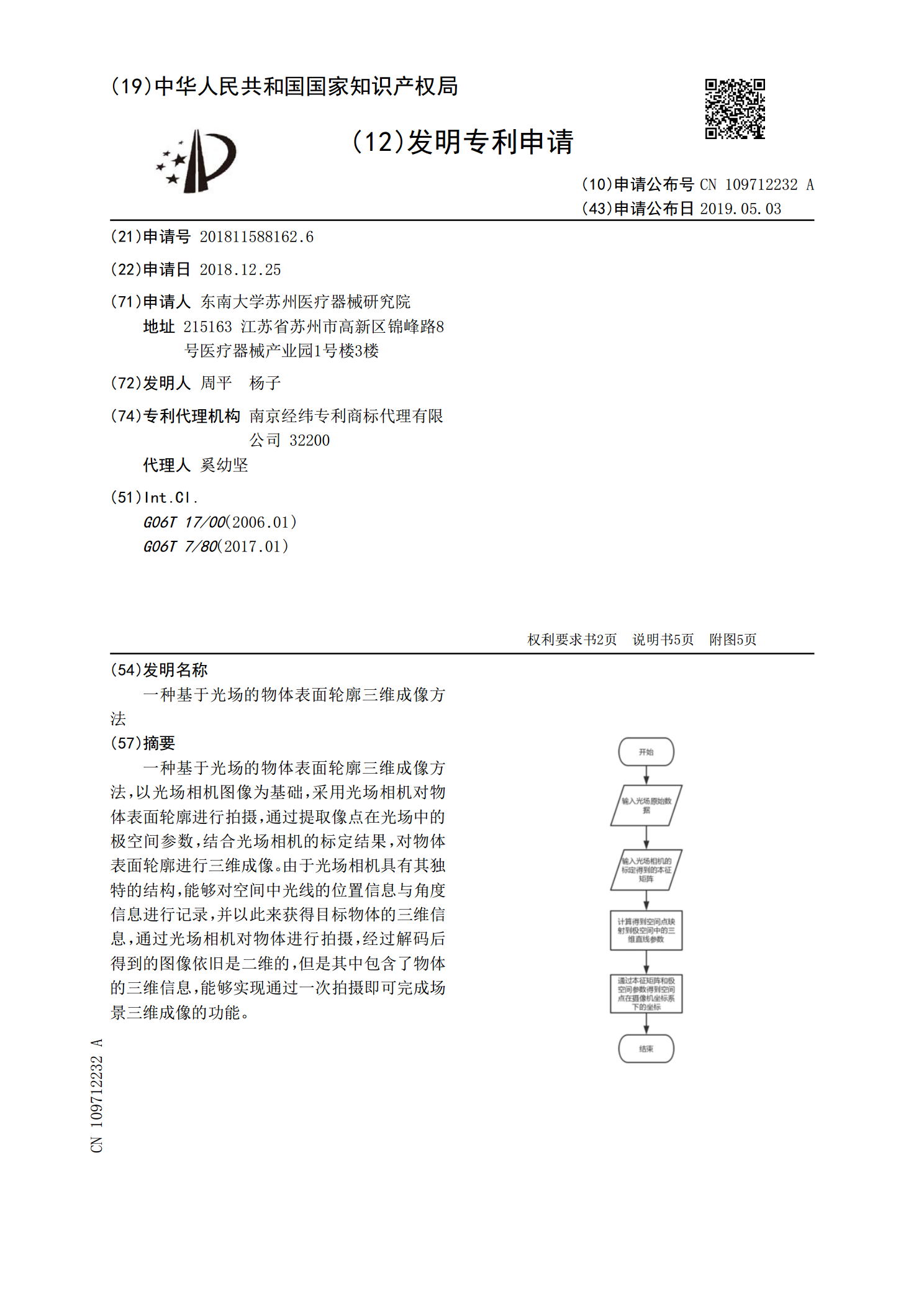
一种基于光场的物体表面轮廓三维成像方法,以光场相机图像为基础,采用光场相机对物体表面轮廓进行拍摄,通过提取像点在光场中的极空间参数,结合光场相机的标定结果,对物体表面轮廓进行三维成像。由于光场相机具有其独特的结构,能够对空间中光线的位置信息与角度信息进行记录,并以此来获得目标物体的三维信息,通过光场相机对物体进行拍摄,经过解码后得到的图像依旧是二维的,但是其中包含了物体的三维信息,能够实现通过一次拍摄即可完成场景三维成像的功能。

基于线结构光的复杂深孔内轮廓三维测量方法.docx
基于线结构光的复杂深孔内轮廓三维测量方法摘要本文介绍了基于线结构光的复杂深孔内轮廓三维测量方法。该方法通过使用线结构光的光条,对复杂的深孔内轮廓进行了高精度的三维测量。本文提出了一种新的采集和处理技术,能够有效地减少噪声和提高测量精度。通过实验对测量结果进行了验证,证明了该方法的可行性和优越性。关键词:线结构光,深孔内轮廓,三维测量,采集,处理技术引言三维测量技术在制造业、汽车、航空航天等领域得到了广泛的应用。而对于内腔等复杂形态的轮廓,传统的三维测量方法往往难以实现高精度的测量。基于线结构光的三维测量方

光场层析成像三维流场测量方法研究.docx
光场层析成像三维流场测量方法研究光场层析成像是一种非接触、快速、高精度、三维测量的新型光学测量装备,可广泛应用于流场等领域的实时观测与分析。本文旨在探究应用光场层析成像技术进行三维流场测量的方法与原理,并对其在实际工程应用中的优缺点进行探讨。一、光场层析成像原理光场层析成像是一种基于干涉测量原理的三维测量方法,其基本原理是通过对透明物体的透过光场进行成像测量,使用不同角度的光束在物体上测量出的干涉图像,经过计算后可以得到物体的三维形态。该技术具有抗干扰性强、分辨率高、测量精度高等优点。二、光场层析成像流场

基于光谱匹配滤波的线结构光扫描人脸轮廓三维成像系统.docx
基于光谱匹配滤波的线结构光扫描人脸轮廓三维成像系统基于光谱匹配滤波的线结构光扫描人脸轮廓三维成像系统摘要:随着人脸识别技术的发展,越来越多的应用场景需要获取精准、高质量的人脸轮廓三维成像。本文提出了一种基于光谱匹配滤波的线结构光扫描人脸轮廓三维成像系统。该系统结合线结构光投射和光谱匹配滤波技术,能够实现高精度的人脸轮廓三维成像。在硬件方面,系统由光源、相机、线结构光投射器和滤光片组成;在算法方面,系统采用光谱匹配滤波算法对扫描得到的图像进行处理,提取出准确的人脸轮廓。实验证明,该系统能够实现准确、快速、高