
结构光投影全视角三维成像系统及方法.pdf

是你****韵呀

1/10

2/10

3/10
4/10

5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
结构光投影全视角三维成像系统及方法.pdf
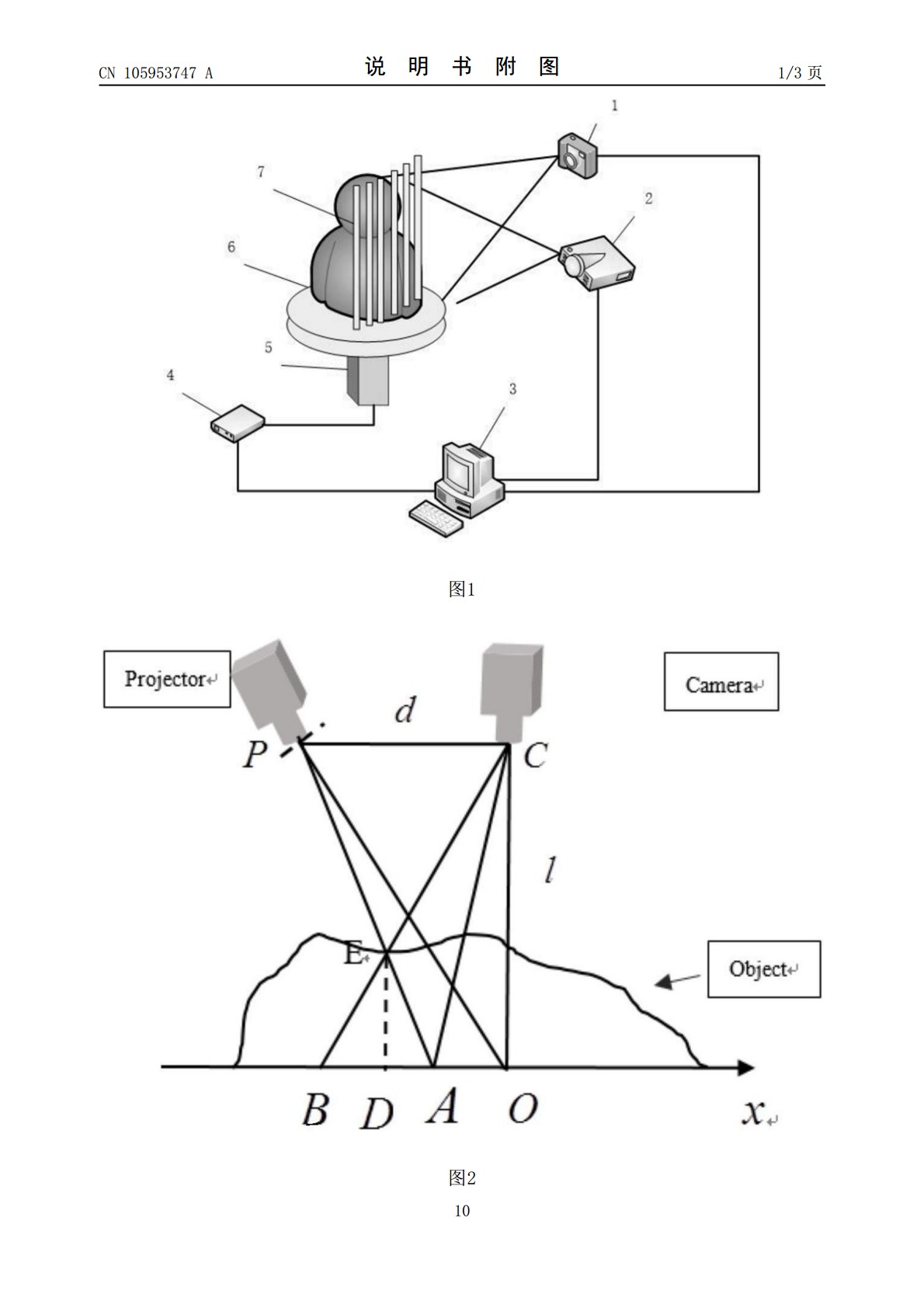
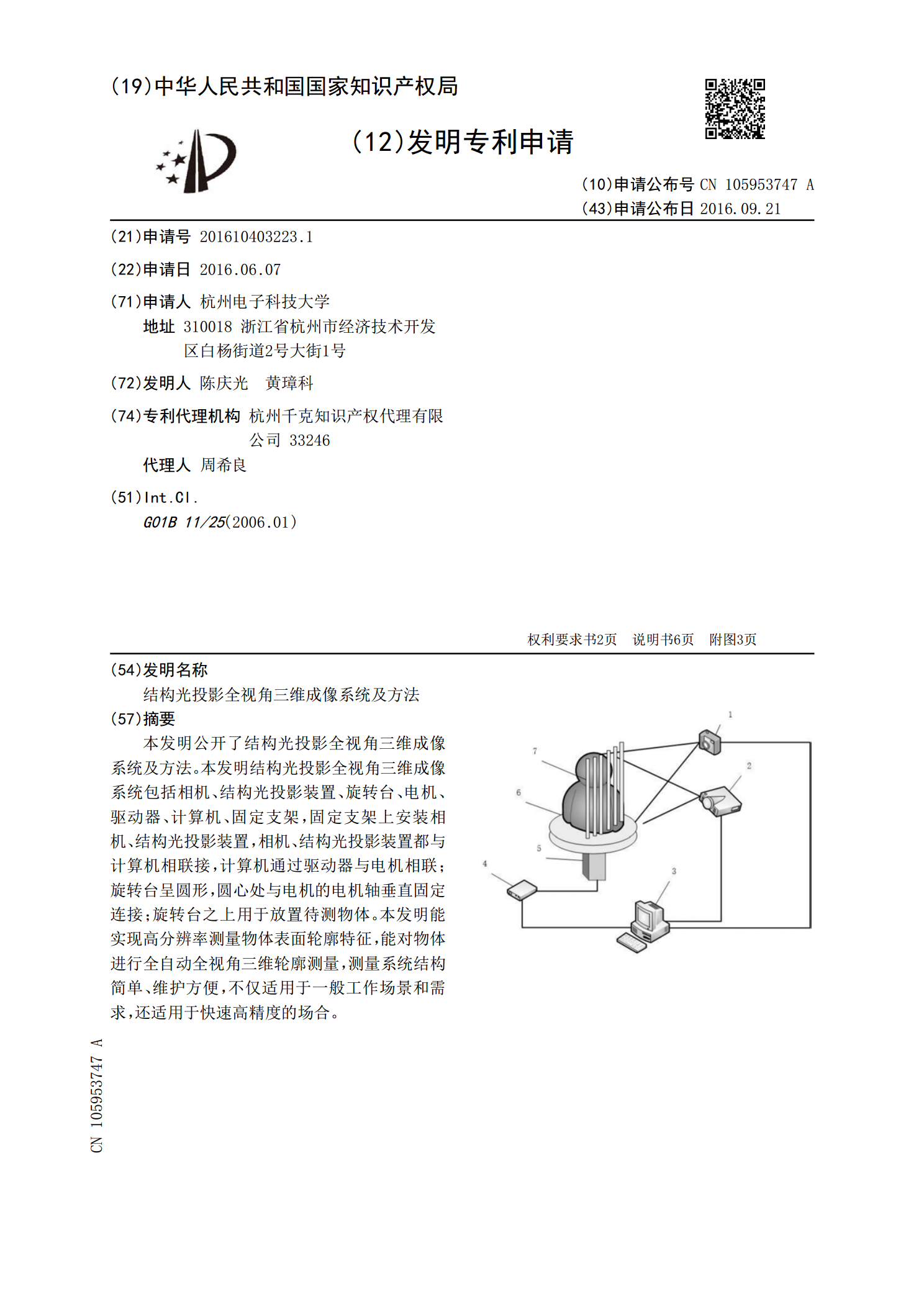
本发明公开了结构光投影全视角三维成像系统及方法。本发明结构光投影全视角三维成像系统包括相机、结构光投影装置、旋转台、电机、驱动器、计算机、固定支架,固定支架上安装相机、结构光投影装置,相机、结构光投影装置都与计算机相联接,计算机通过驱动器与电机相联;旋转台呈圆形,圆心处与电机的电机轴垂直固定连接;旋转台之上用于放置待测物体。本发明能实现高分辨率测量物体表面轮廓特征,能对物体进行全自动全视角三维轮廓测量,测量系统结构简单、维护方便,不仅适用于一般工作场景和需求,还适用于快速高精度的场合。
结构光三维测量系统的投影成像镜头组调焦方法.pdf
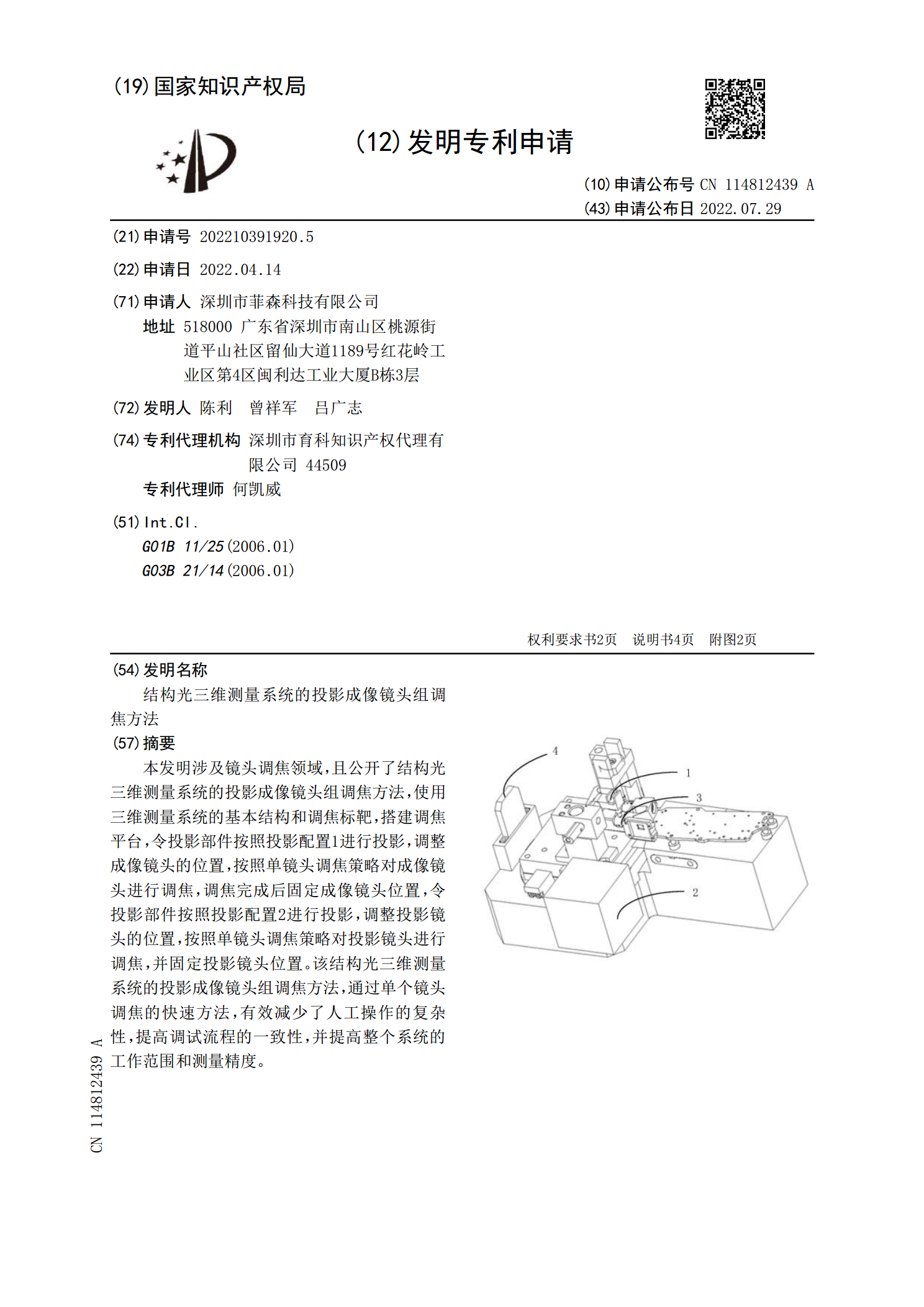
本发明涉及镜头调焦领域,且公开了结构光三维测量系统的投影成像镜头组调焦方法,使用三维测量系统的基本结构和调焦标靶,搭建调焦平台,令投影部件按照投影配置1进行投影,调整成像镜头的位置,按照单镜头调焦策略对成像镜头进行调焦,调焦完成后固定成像镜头位置,令投影部件按照投影配置2进行投影,调整投影镜头的位置,按照单镜头调焦策略对投影镜头进行调焦,并固定投影镜头位置。该结构光三维测量系统的投影成像镜头组调焦方法,通过单个镜头调焦的快速方法,有效减少了人工操作的复杂性,提高调试流程的一致性,并提高整个系统的工作范围和

旋转光投影成像结构.pdf
本发明公开了一种旋转光投影成像结构,包括基板散热器,发光芯片组,聚光结构,图像屏和镜头。发光芯片组发出的光经聚光结构汇聚到图像屏再经镜头投影出图案。还包括电机,电机使得发光芯片组和聚光结构发生旋转移动,进而使射到图像屏上光线能够产生移动的轨迹变化。利用视觉暂留原理,在视觉上增加其发光面积和亮度。节能高效的提高了投出光斑或图案的亮度和均匀度。同时又降低发光芯片组的散热要求。
投影成像装置、投影成像装置的使用方法及液晶光阀系统.pdf
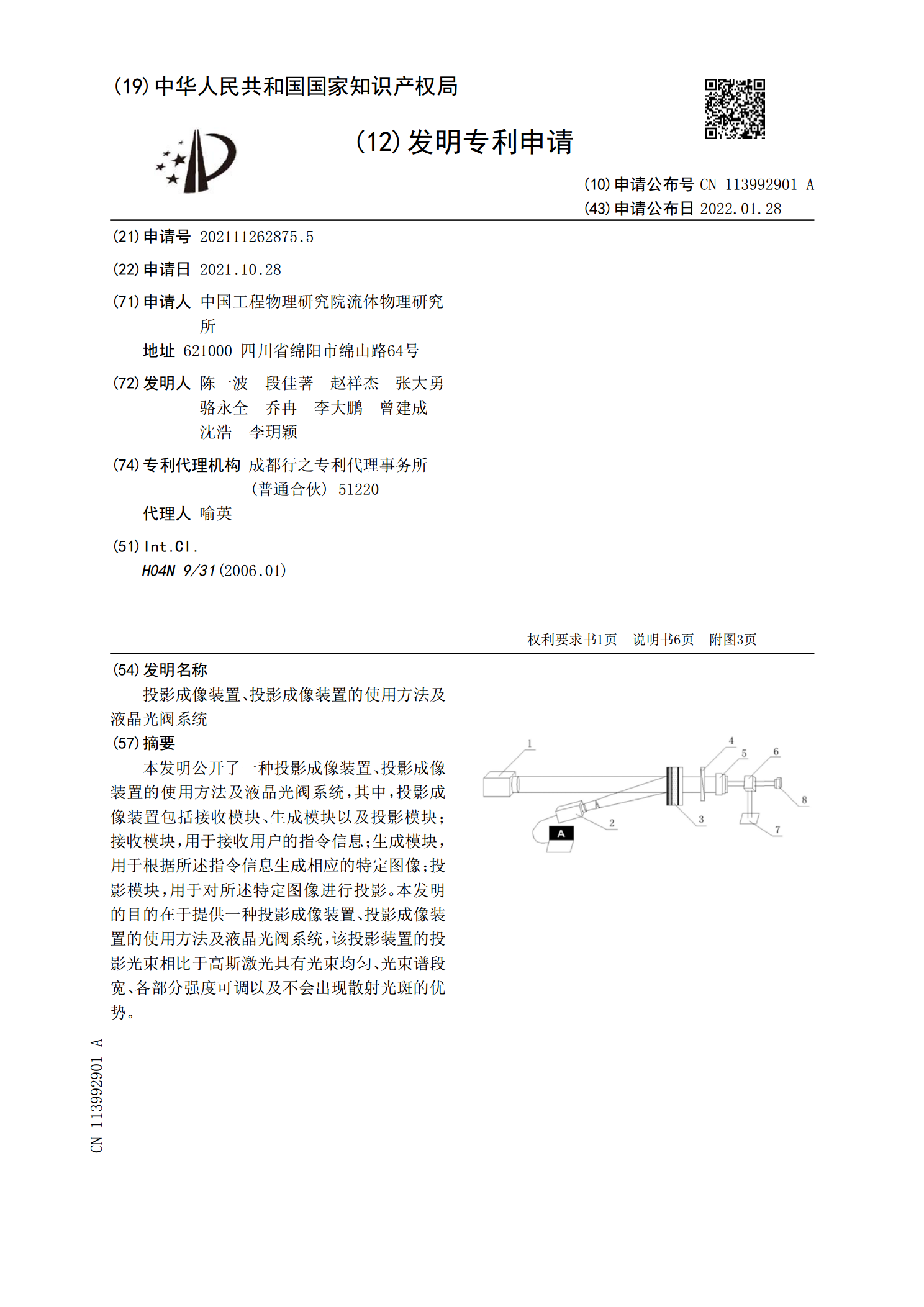
本发明公开了一种投影成像装置、投影成像装置的使用方法及液晶光阀系统,其中,投影成像装置包括接收模块、生成模块以及投影模块;接收模块,用于接收用户的指令信息;生成模块,用于根据所述指令信息生成相应的特定图像;投影模块,用于对所述特定图像进行投影。本发明的目的在于提供一种投影成像装置、投影成像装置的使用方法及液晶光阀系统,该投影装置的投影光束相比于高斯激光具有光束均匀、光束谱段宽、各部分强度可调以及不会出现散射光斑的优势。

多视角沙姆成像的高精度结构光三维测量方法.pptx
添加副标题目录PART01PART02沙姆成像原理简介多视角沙姆成像的优势结构光三维测量的应用场景PART03结构光投影技术三维重建算法测量精度提升策略实验验证与结果分析PART04相机标定与优化图像拼接与融合算法实时数据处理与传输实验结果与性能评估PART05工业检测中的难点与需求多视角沙姆成像在工业检测中的优势实际应用案例与效果分析对工业检测领域的贡献与前景展望PART06算法优化与改进硬件升级与性能提升应用领域的拓展与跨界融合对未来科技发展的影响与价值感谢您的观看