
一种结合TCP标定的深度相机手眼标定方法.pptx

快乐****蜜蜂


1/10

2/10

3/10

4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种结合TCP标定的深度相机手眼标定方法.pptx
一种结合TCP标定的深度相机手眼标定方法目录添加章节标题TCP标定TCP标定方法介绍TCP标定在深度相机手眼标定中的作用TCP标定的实施步骤TCP标定结果的验证深度相机手眼标定深度相机手眼标定方法介绍深度相机手眼标定的原理深度相机手眼标定的实施步骤深度相机手眼标定结果的验证结合TCP标定的深度相机手眼标定方法结合TCP标定的深度相机手眼标定方法的原理结合TCP标定的深度相机手眼标定的实施步骤结合TCP标定的深度相机手眼标定结果的验证结合TCP标定的深度相机手眼标定方法的优势与局限性实验与分析实验设置与数据
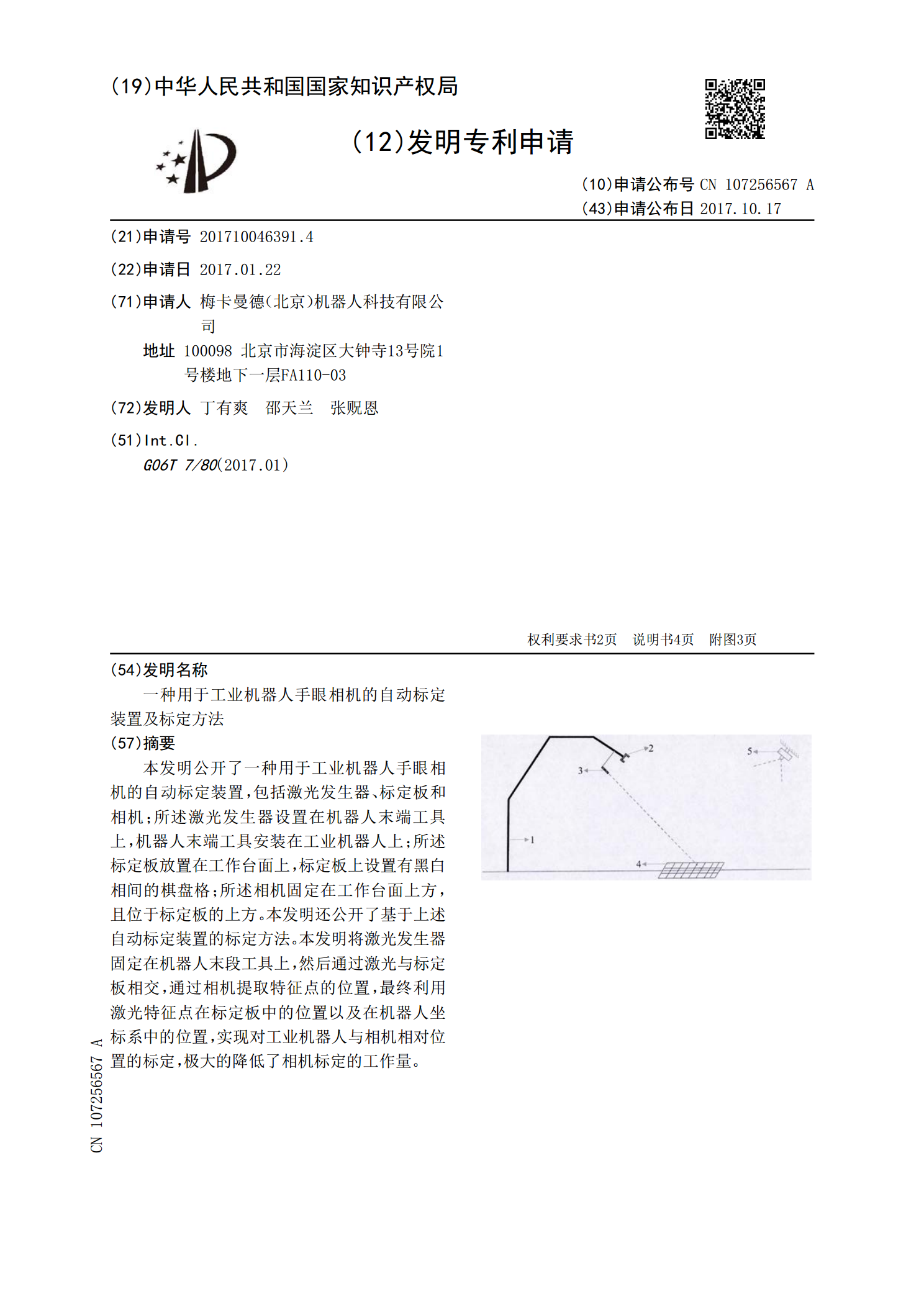
一种用于工业机器人手眼相机的自动标定装置及标定方法.pdf
本发明公开了一种用于工业机器人手眼相机的自动标定装置,包括激光发生器、标定板和相机;所述激光发生器设置在机器人末端工具上,机器人末端工具安装在工业机器人上;所述标定板放置在工作台面上,标定板上设置有黑白相间的棋盘格;所述相机固定在工作台面上方,且位于标定板的上方。本发明还公开了基于上述自动标定装置的标定方法。本发明将激光发生器固定在机器人末段工具上,然后通过激光与标定板相交,通过相机提取特征点的位置,最终利用激光特征点在标定板中的位置以及在机器人坐标系中的位置,实现对工业机器人与相机相对位置的标定,极大的

基于手眼关系的机器人TCP自标定方法.pptx
基于手眼关系的机器人TCP自标定方法目录添加章节标题手眼关系概述手眼关系的定义手眼关系的类型手眼关系在机器人领域的应用TCP自标定方法介绍TCP自标定的定义TCP自标定方法的原理TCP自标定方法的优势基于手眼关系的TCP自标定方法手眼关系在TCP自标定中的应用基于手眼关系的TCP自标定方法流程基于手眼关系的TCP自标定方法的特点与优势实验验证与结果分析实验设置与实验环境实验过程与实验数据实验结果分析实验结论总结与展望基于手眼关系的机器人TCP自标定方法的总结基于手眼关系的机器人TCP自标定方法的展望THA

一种基于线扫描相机的手眼标定技术.docx
一种基于线扫描相机的手眼标定技术1.引言手眼标定技术是机器人学中的常见问题之一,其主要目标是准确地计算机器人基座与末端执行器之间的相对运动关系。可以使用不同的传感器和算法进行手眼标定,其中基于线扫描相机的技术已经被广泛地应用于磨损测试、精密测量及工业制造等领域。在本文中,我们将详细介绍基于线扫描相机的手眼标定技术。2.基于线扫描相机的手眼标定原理基于线扫描相机的手眼标定技术通过测量机器人的运动,计算机器人基座与末端执行器之间的相对运动关系。线扫描相机在机器人末端执行器上安装,其测量原理基于扫描相机的成像机

深度相机自动标定方法研究.docx
深度相机自动标定方法研究标题:深度相机自动标定方法的研究摘要:深度相机是一种能够提供精确深度信息的传感器,广泛应用于计算机视觉、机器人、虚拟现实等领域。在使用深度相机之前,需要对其进行标定,以保证测量的准确性和稳定性。然而,传统的手动标定方法需要耗费大量的时间和精力,且存在人为误差可能。因此,自动标定方法逐渐被研究和开发,以提高标定的效率和准确性。本论文将重点研究深度相机的自动标定方法,包括特征提取、标定算法和优化方法等方面,并提出一种基于XYZ轴平面标定板的自动标定方法来解决传统标定方法存在的问题。1.