
一种基于线扫描相机的手眼标定技术.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于线扫描相机的手眼标定技术.docx
一种基于线扫描相机的手眼标定技术1.引言手眼标定技术是机器人学中的常见问题之一,其主要目标是准确地计算机器人基座与末端执行器之间的相对运动关系。可以使用不同的传感器和算法进行手眼标定,其中基于线扫描相机的技术已经被广泛地应用于磨损测试、精密测量及工业制造等领域。在本文中,我们将详细介绍基于线扫描相机的手眼标定技术。2.基于线扫描相机的手眼标定原理基于线扫描相机的手眼标定技术通过测量机器人的运动,计算机器人基座与末端执行器之间的相对运动关系。线扫描相机在机器人末端执行器上安装,其测量原理基于扫描相机的成像机

一种结合TCP标定的深度相机手眼标定方法.pptx
一种结合TCP标定的深度相机手眼标定方法目录添加章节标题TCP标定TCP标定方法介绍TCP标定在深度相机手眼标定中的作用TCP标定的实施步骤TCP标定结果的验证深度相机手眼标定深度相机手眼标定方法介绍深度相机手眼标定的原理深度相机手眼标定的实施步骤深度相机手眼标定结果的验证结合TCP标定的深度相机手眼标定方法结合TCP标定的深度相机手眼标定方法的原理结合TCP标定的深度相机手眼标定的实施步骤结合TCP标定的深度相机手眼标定结果的验证结合TCP标定的深度相机手眼标定方法的优势与局限性实验与分析实验设置与数据

基于相机与手眼标定的机械手移载引导算法.docx
基于相机与手眼标定的机械手移载引导算法摘要本文介绍了一种基于相机与手眼标定的机械手移载引导算法。该算法使用相机测量物体的姿态和位置,并结合机械手的手眼标定结果进行运动控制,实现了机械手对物体的移载。具体来说,我们首先对机械手和相机进行参数标定,然后利用相机计算物体在三维空间中的位置和姿态信息。接着,我们通过机械手的手眼标定来计算机械手末端执行器的位置和姿态,从而确定移载目标的位置和姿态。最后,我们将机械手控制命令发送给控制器,实现机械手对物体的移载。本算法具有稳定性高、实时性强等优点,可应用于机械手的自动
基于激光扫描仪标定线阵相机的系统及方法.pdf
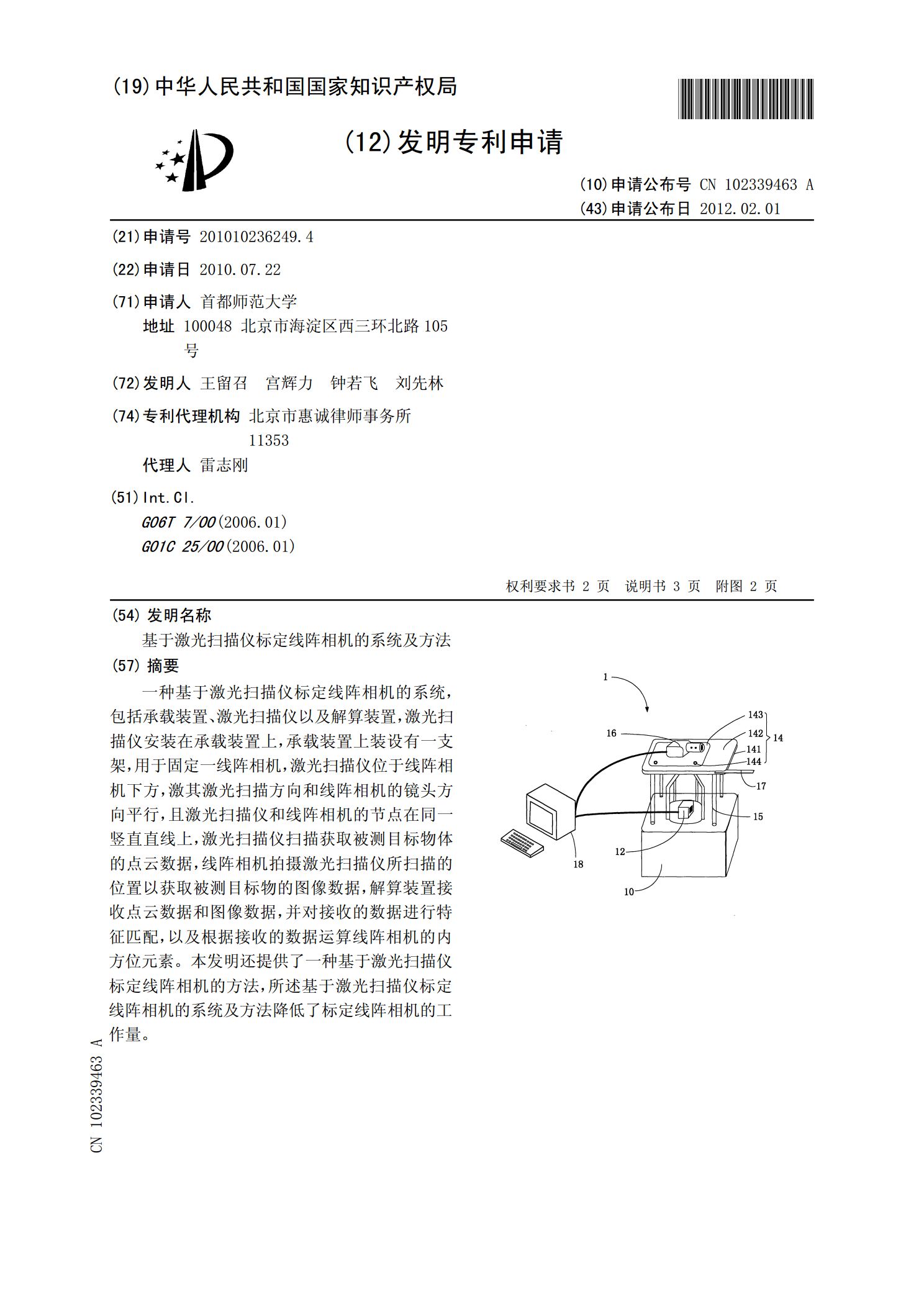
一种基于激光扫描仪标定线阵相机的系统,包括承载装置、激光扫描仪以及解算装置,激光扫描仪安装在承载装置上,承载装置上装设有一支架,用于固定一线阵相机,激光扫描仪位于线阵相机下方,激其激光扫描方向和线阵相机的镜头方向平行,且激光扫描仪和线阵相机的节点在同一竖直直线上,激光扫描仪扫描获取被测目标物体的点云数据,线阵相机拍摄激光扫描仪所扫描的位置以获取被测目标物的图像数据,解算装置接收点云数据和图像数据,并对接收的数据进行特征匹配,以及根据接收的数据运算线阵相机的内方位元素。本发明还提供了一种基于激光扫描仪标定线

基于投影变换的线阵旋转扫描相机标定方法.docx
基于投影变换的线阵旋转扫描相机标定方法基于投影变换的线阵旋转扫描相机标定方法摘要:线阵旋转扫描相机是一种常用于工业检测和三维测量的非接触式相机,精确的标定是确保其测量精度的关键。本文提出了一种基于投影变换的线阵旋转扫描相机标定方法。该方法通过利用线阵相机在不同旋转角度下观测到的校准板平面上的投影特征,计算出相机内外参数,从而实现相机的准确标定。实验证明,该方法能够有效地提高线阵旋转扫描相机的标定精度。关键词:线阵旋转扫描相机,标定,投影变换,内外参数1.引言线阵旋转扫描相机是一种通过旋转扫描来获取三维信息