
基于单目相机的旋转对称目标视觉测量的任务书.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于单目相机的旋转对称目标视觉测量的任务书.docx
基于单目相机的旋转对称目标视觉测量的任务书一、任务背景随着现代工业的高速发展,对于复杂旋转对称目标的视觉测量需求逐渐增大,尤其是在航空航天、汽车制造、机器人等领域,旋转对称目标的测量已经成为了不可或缺的一部分。然而,在目前的实际工程中,采用传统测量方法,如手工测量或者三坐标测量等,由于存在测量复杂、工序繁琐、数据不准确等问题,无法满足工业界对测量效率、准确性、可靠性等方面的要求。因此,如何提高旋转对称目标视觉测量中的效率和准确度,是一个亟待解决的问题。二、任务目标本次任务的目标是基于单目相机完成对旋转对称

基于单目相机的空间非合作目标姿态测量(英文).docx
基于单目相机的空间非合作目标姿态测量(英文)IntroductionAttitudeestimationofspaceobjectsisanimportanttaskinthefieldofrobotics,spaceexploration,anddefense.Itisusedtodeterminetheorientationofatargetinspace,whichiscrucialinvariousapplicationssuchasdocking,landing,andreconnoiterin

基于单目相机的视觉伺服算法研究综述报告.pptx
添加副标题目录PART01PART02视觉伺服的定义和发展历程单目相机在视觉伺服中的应用综述的目的和意义PART03视觉伺服系统的组成视觉伺服的目标跟踪原理视觉伺服的相机标定原理视觉伺服的控制策略PART04图像预处理技术特征提取技术目标跟踪技术相机标定技术控制策略优化技术PART05实验平台的搭建与实验条件实验结果与分析算法性能的评估指标实验结论与改进方向PART06单目相机视觉伺服算法在机器人领域的应用案例单目相机视觉伺服算法在其他领域的应用前景单目相机视觉伺服算法的发展趋势与展望PART07本综述报
基于船载单目相机的视觉特征提取方法.pdf
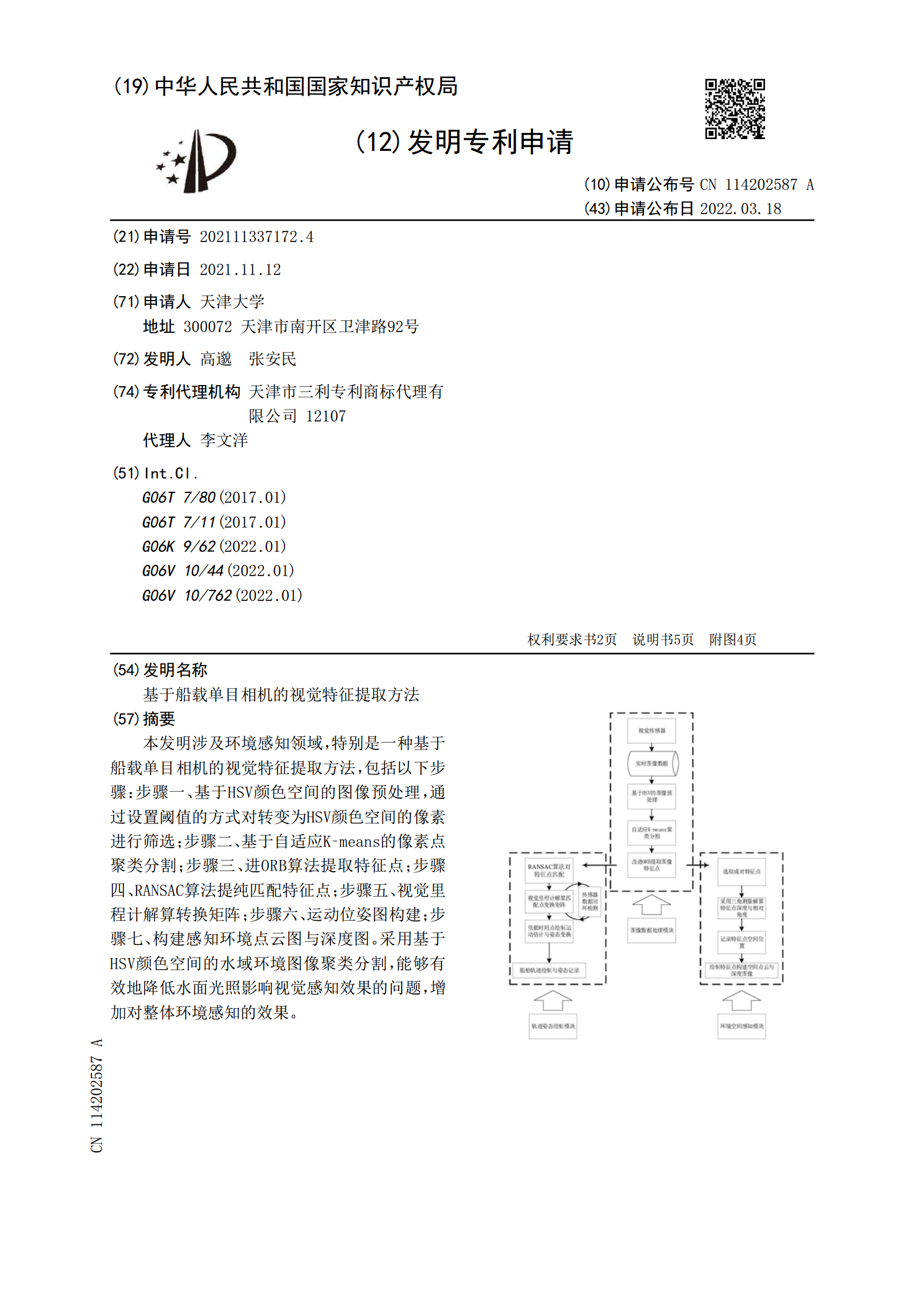
本发明涉及环境感知领域,特别是一种基于船载单目相机的视觉特征提取方法,包括以下步骤:步骤一、基于HSV颜色空间的图像预处理,通过设置阈值的方式对转变为HSV颜色空间的像素进行筛选;步骤二、基于自适应K‑means的像素点聚类分割;步骤三、进ORB算法提取特征点;步骤四、RANSAC算法提纯匹配特征点;步骤五、视觉里程计解算转换矩阵;步骤六、运动位姿图构建;步骤七、构建感知环境点云图与深度图。采用基于HSV颜色空间的水域环境图像聚类分割,能够有效地降低水面光照影响视觉感知效果的问题,增加对整体环境感知的效果

基于旋转对称模板的相机标定.docx
基于旋转对称模板的相机标定基于旋转对称模板的相机标定摘要:相机标定是计算机视觉领域中一个重要的任务,它在计算机视觉、图像处理、机器人等领域具有广泛的应用。本文提出了一种基于旋转对称模板的相机标定方法。该方法通过使用旋转对称模板,对相机进行标定,从而提高了标定的准确性和可靠性。实验结果表明,该方法在标定精度上具有较好的性能,并且具有较好的实用性。1.引言相机标定是计算机视觉领域中的一个重要问题,旨在确定相机内部参数(如焦距、畸变系数等)和外部参数(如旋转矩阵、平移向量等),从而使得相机能够准确地捕捉并处理图