
上肢康复冗余机械臂系统研究的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

上肢康复冗余机械臂系统研究的开题报告.docx
上肢康复冗余机械臂系统研究的开题报告一、选题背景随着人口老龄化的加剧和工业自动化的发展,协助机器人系统在医疗康复和工业生产等领域得到了广泛的应用。特别是在康复医疗领域中,机器人辅助康复治疗已经成为常用的手段之一,尤其是在上肢康复方面。然而,现有的康复机器人往往缺乏动作冗余性,造成康复过程的不足和难度。因此,开发一种具备冗余的上肢康复机械臂系统至关重要。二、选题意义1.提高康复治疗效果上肢康复机械臂系统是一种先进的治疗手段,可以有效地帮助瘫痪或肌肉萎缩的患者进行康复训练。而有了冗余设计后,机械臂可以根据实际

冗余机械臂运动避障与路径规划的开题报告.docx
冗余机械臂运动避障与路径规划的开题报告一、研究背景机械臂在工业、医疗、服务和家庭等领域中得到了广泛的应用。在这些应用场景中,机械臂需要完成各种不同的任务,例如装配、喷涂、拾取和送货等。机械臂的运动必须精确而高效,否则会影响任务的完成质量和效率。然而,在机器人运动过程中,通常会面临障碍物的问题。机械臂需要能够避开障碍物,同时保证路径的规划和运动的连续性。因此,如何实现机械臂的避障和路径规划成为了当前机器人领域中的一个重点研究方向。二、研究目的本研究的目的是设计一种冗余机械臂的运动避障与路径规划方法。该方法能
中央驱动式上肢康复训练机械臂.pdf
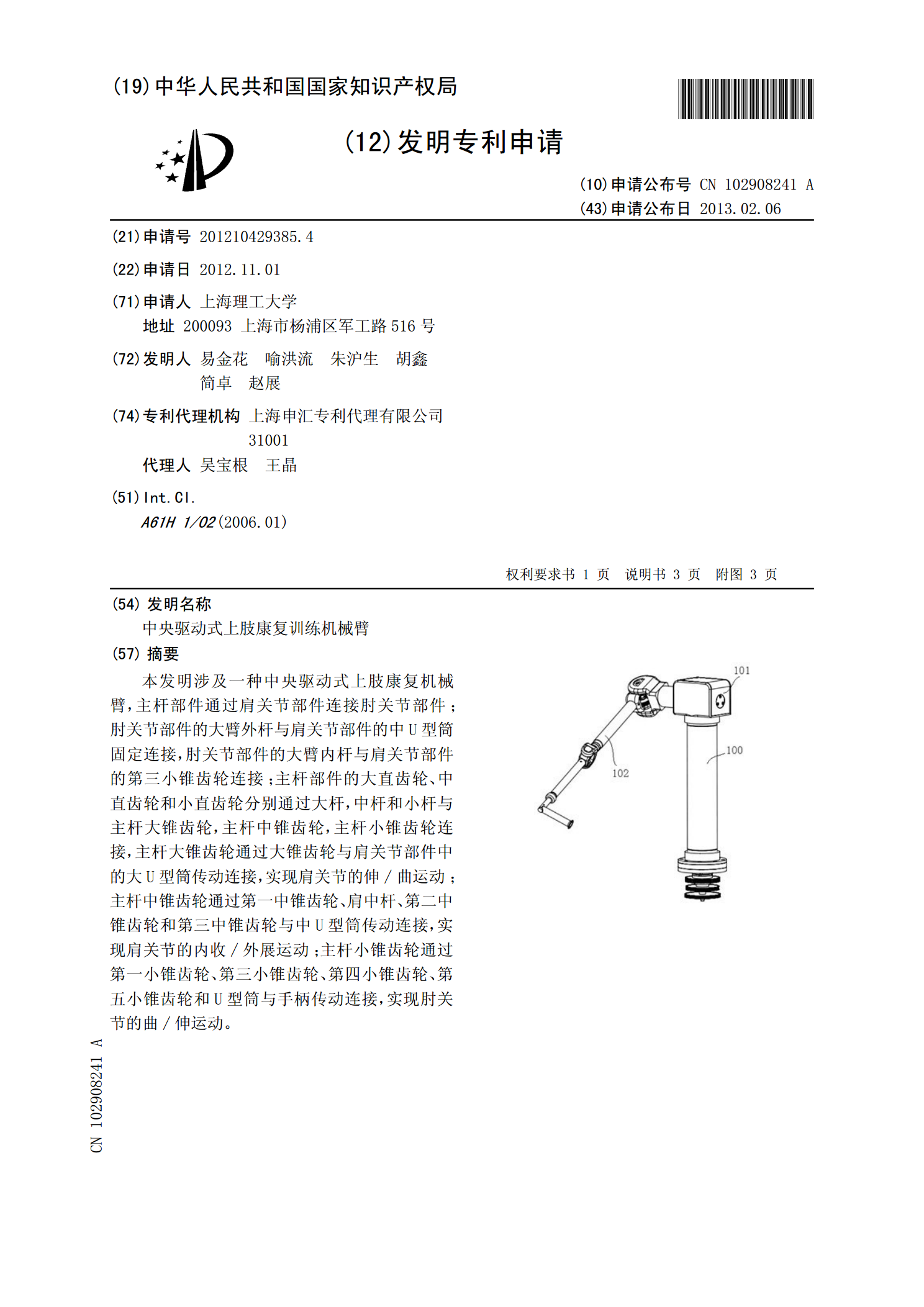
本发明涉及一种中央驱动式上肢康复机械臂,主杆部件通过肩关节部件连接肘关节部件;肘关节部件的大臂外杆与肩关节部件的中U型筒固定连接,肘关节部件的大臂内杆与肩关节部件的第三小锥齿轮连接;主杆部件的大直齿轮、中直齿轮和小直齿轮分别通过大杆,中杆和小杆与主杆大锥齿轮,主杆中锥齿轮,主杆小锥齿轮连接,主杆大锥齿轮通过大锥齿轮与肩关节部件中的大U型筒传动连接,实现肩关节的伸/曲运动;主杆中锥齿轮通过第一中锥齿轮、肩中杆、第二中锥齿轮和第三中锥齿轮与中U型筒传动连接,实现肩关节的内收/外展运动;主杆小锥齿轮通过第一小锥

基于轨迹跟踪的上肢康复交互训练系统研究的开题报告.docx
基于轨迹跟踪的上肢康复交互训练系统研究的开题报告一、研究背景及意义随着现代医学技术的不断提升,康复医学的发展越来越受到人们的重视。而上肢康复是康复医学的重点之一,其对于缓解疾病病情,恢复患者日常生活和工作的能力具有重要作用。传统的上肢康复训练方式主要依赖于医生和康复师的手动操控,存在刺激不足、操作难度大、效果难以保证等问题。因此,通过应用新技术,研发出一种精准、方便、有效的上肢康复训练系统,将对于康复患者的状态维护和康复治疗产生重大意义。轨迹跟踪技术作为一种重要的计算机视觉技术,可以对人体姿态、运动轨迹等

基于容错空间的冗余机械臂构型及尺度综合的开题报告.docx
基于容错空间的冗余机械臂构型及尺度综合的开题报告1.研究背景随着社会的发展和科技的进步,机械臂在生产制造、医疗、环保等各个领域中得到了广泛的应用。机械臂的工作环境更多的趋向于危险、高温、高压等不适合人工操作的情况下,机械臂能够发挥巨大的优势。但是,机械臂作业环境的复杂性和难以进行维护给机械臂的稳定性和可靠性带来了极大的挑战,因此在机械臂上加入冗余器是提高机械臂稳定性和可靠性的一种有效方式,能够有效解决机械臂在作业过程中存在的失效问题。2.研究内容本文研究基于容错空间的冗余机械臂构型及尺度综合,以提高机械臂