
基于容错空间的冗余机械臂构型及尺度综合的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于容错空间的冗余机械臂构型及尺度综合的开题报告.docx
基于容错空间的冗余机械臂构型及尺度综合的开题报告1.研究背景随着社会的发展和科技的进步,机械臂在生产制造、医疗、环保等各个领域中得到了广泛的应用。机械臂的工作环境更多的趋向于危险、高温、高压等不适合人工操作的情况下,机械臂能够发挥巨大的优势。但是,机械臂作业环境的复杂性和难以进行维护给机械臂的稳定性和可靠性带来了极大的挑战,因此在机械臂上加入冗余器是提高机械臂稳定性和可靠性的一种有效方式,能够有效解决机械臂在作业过程中存在的失效问题。2.研究内容本文研究基于容错空间的冗余机械臂构型及尺度综合,以提高机械臂

基于容错空间的冗余机械臂构型及尺度综合.docx
基于容错空间的冗余机械臂构型及尺度综合摘要随着工业自动化的不断发展,机械臂作为重要的工业机器人,越来越广泛地应用于各个领域。然而,由于机械臂复杂的工作环境和工作负载,故障率较高,这给生产带来了巨大的问题。因此,如何提高机械臂的容错性能是一个紧迫的问题。本文提出了一种基于容错空间的冗余机械臂构型及尺度综合方法,该方法能够减少机械臂在故障情况下的损失,并提高机械臂的生产效率和安全性。关键词:机械臂,容错性能,冗余机械臂,构型及尺度综合AbstractWiththecontinuousdevelopmentof

基于容错指标的机械臂结构综合的开题报告.docx
基于容错指标的机械臂结构综合的开题报告一、研究背景机械臂结构在工业生产中扮演着重要的角色,一些工业领域的自动化生产离不开机械臂的支持。由于机械臂具有较高的精度和速度,因此在某些需要高精度和高速度的工作场合中,机械臂结构比人工操作更具优势。然而,在机械臂运行过程中,机械臂结构所受到的载荷和外界干扰等因素都会影响机械臂的运行稳定性和设备寿命,因此需要对机械臂结构进行优化改进以提高机械臂的容错性能。二、研究目的本研究旨在基于容错指标对机械臂结构进行综合优化,提高机械臂的容错性能和设备可靠性,降低途中故障的概率,

冗余空间机械臂的运动规划方法研究的开题报告.docx
冗余空间机械臂的运动规划方法研究的开题报告一、研究背景和意义随着机器人技术的不断发展,机械臂已经成为现代工业生产中的重要工具。机械臂也逐渐在其他领域得到广泛运用,如医疗护理、家庭服务、军事安全等。由于机械臂高效准确的运动功能,在实际应用中具有非常广泛的应用前景。而冗余空间机械臂是一种非常特殊的机械臂类型,它拥有超过身体自由度的特殊构造,可以执行更加复杂、灵活的任务。但是,冗余空间机械臂的运动规划比较困难,并且目前的冗余空间机械臂运动规划方法大都无法满足实际应用需要。因此,对于冗余空间机械臂的运动规划方法进
基于筛选最优目标构型的冗余机械臂路径规划方法及系统.pdf
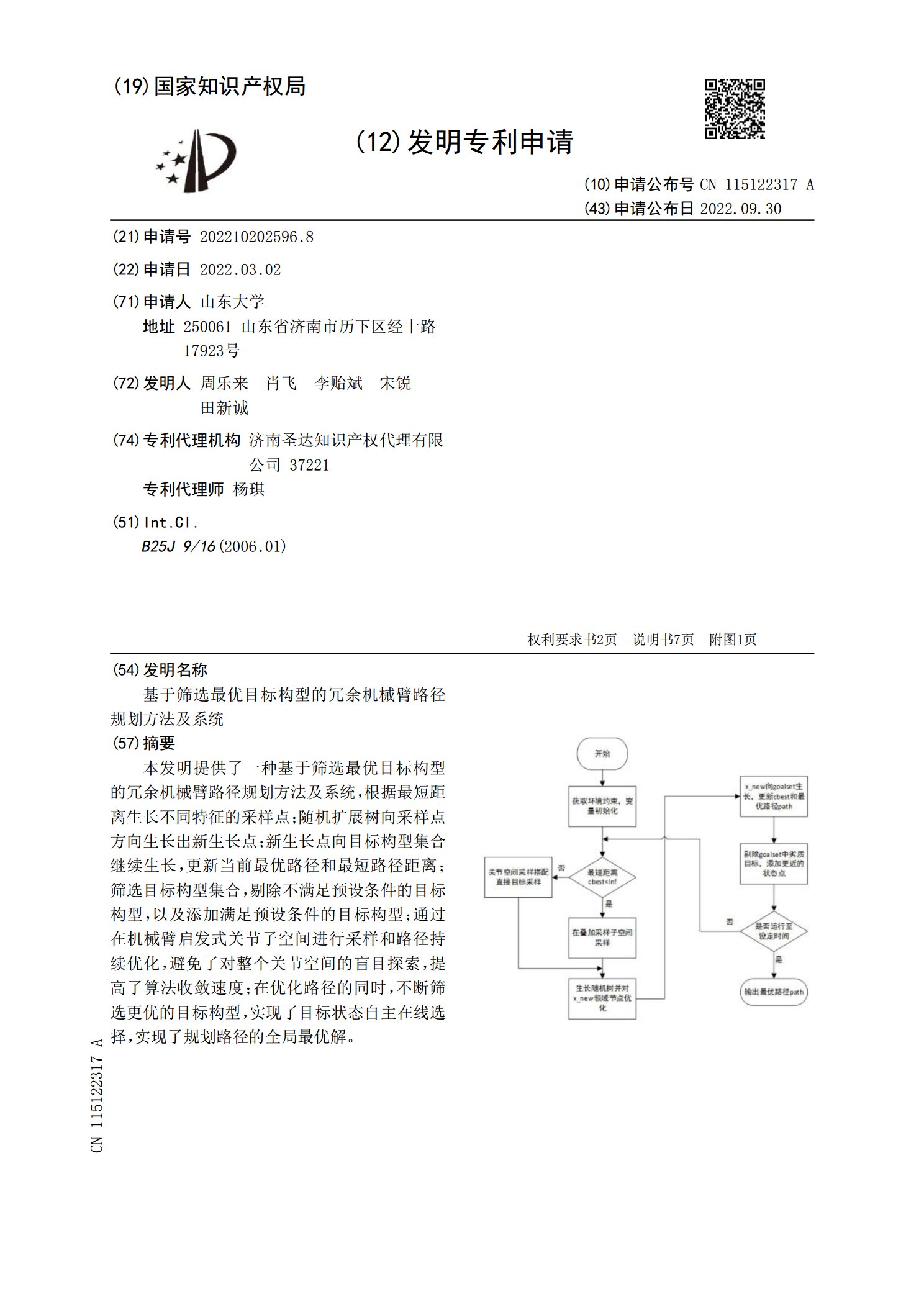
本发明提供了一种基于筛选最优目标构型的冗余机械臂路径规划方法及系统,根据最短距离生长不同特征的采样点;随机扩展树向采样点方向生长出新生长点;新生长点向目标构型集合继续生长,更新当前最优路径和最短路径距离;筛选目标构型集合,剔除不满足预设条件的目标构型,以及添加满足预设条件的目标构型;通过在机械臂启发式关节子空间进行采样和路径持续优化,避免了对整个关节空间的盲目探索,提高了算法收敛速度;在优化路径的同时,不断筛选更优的目标构型,实现了目标状态自主在线选择,实现了规划路径的全局最优解。