
预置刚度精密升降调节装置.pdf

增梅****主啊


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
预置刚度精密升降调节装置.pdf
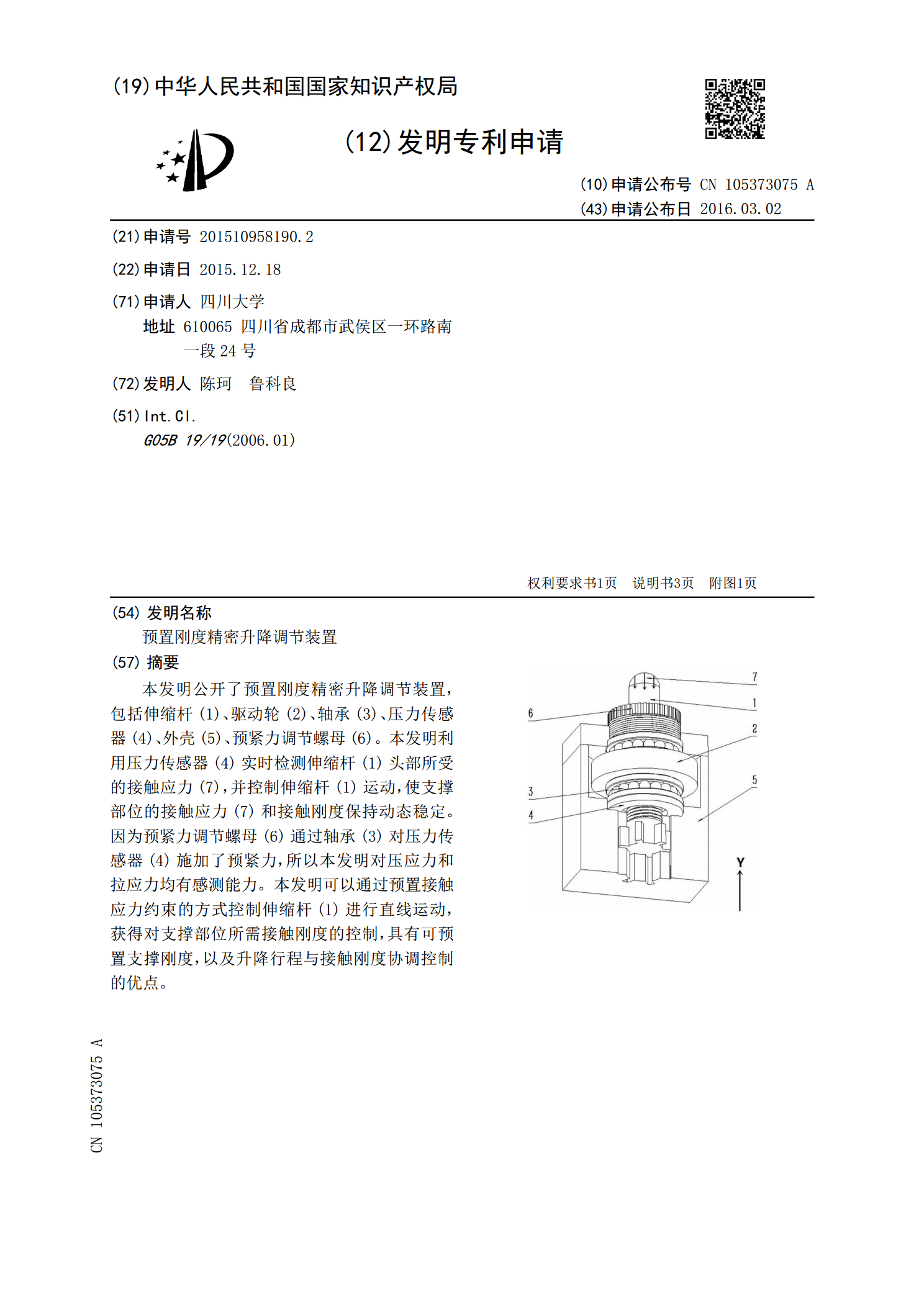
本发明公开了预置刚度精密升降调节装置,包括伸缩杆(1)、驱动轮(2)、轴承(3)、压力传感器(4)、外壳(5)、预紧力调节螺母(6)。本发明利用压力传感器(4)实时检测伸缩杆(1)头部所受的接触应力(7),并控制伸缩杆(1)运动,使支撑部位的接触应力(7)和接触刚度保持动态稳定。因为预紧力调节螺母(6)通过轴承(3)对压力传感器(4)施加了预紧力,所以本发明对压应力和拉应力均有感测能力。本发明可以通过预置接触应力约束的方式控制伸缩杆(1)进行直线运动,获得对支撑部位所需接触刚度的控制,具有可预置支撑刚度,

精密自锁升降调节装置.pdf
本发明装置包括机座及其内部的蜗轮蜗杆传动、螺纹螺旋传动、花键周向固定导向和预紧螺母套的预紧。其特征在于:蜗杆与蜗轮啮合转动,蜗轮和螺杆形成螺旋传动副,并通花键或导向滑键限制螺杆的周向运动,使蜗轮转动变为螺杆的直线运动,同时具有良好的对中导向性。本发明的有益效果是:螺杆在键的导向和定心作用下做高精度的单自由度直线运动,同时螺杆顶端球面与圆锥套形成自定心铰接,改善了顶升接触处的偏置影响;螺杆不做周向转动,确保单自由度直线运动的精度;调节到位后,螺纹连接、蜗轮蜗杆传动都可具有反向自锁功能,增加了装置的稳定可靠性
一种升降装置以及可精密调节物料的压片机.pdf
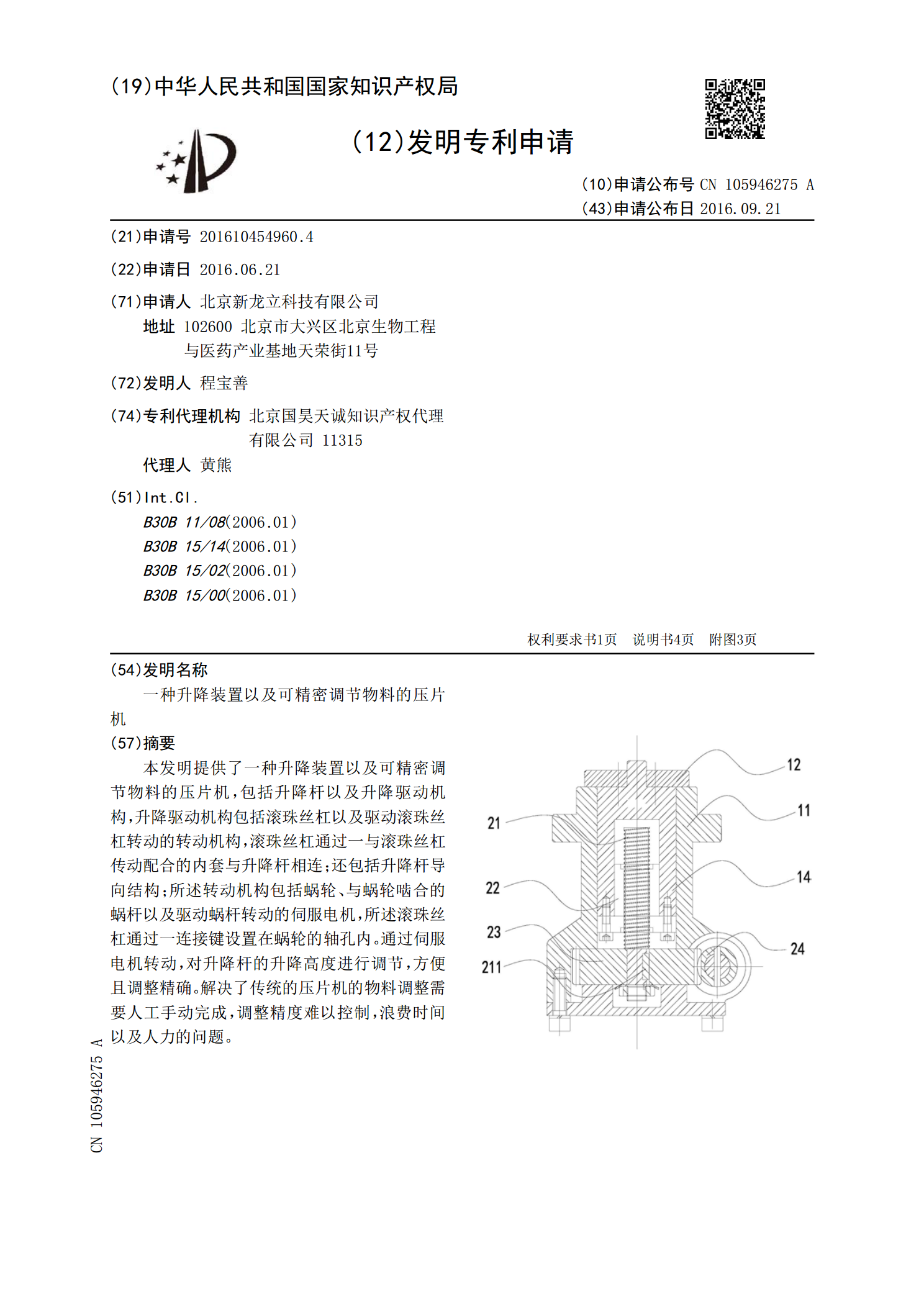
本发明提供了一种升降装置以及可精密调节物料的压片机,包括升降杆以及升降驱动机构,升降驱动机构包括滚珠丝杠以及驱动滚珠丝杠转动的转动机构,滚珠丝杠通过一与滚珠丝杠传动配合的内套与升降杆相连;还包括升降杆导向结构;所述转动机构包括蜗轮、与蜗轮啮合的蜗杆以及驱动蜗杆转动的伺服电机,所述滚珠丝杠通过一连接键设置在蜗轮的轴孔内。通过伺服电机转动,对升降杆的升降高度进行调节,方便且调整精确。解决了传统的压片机的物料调整需要人工手动完成,调整精度难以控制,浪费时间以及人力的问题。
一种汽车刚度可调节的台架实验装置及其刚度调节方法.pdf
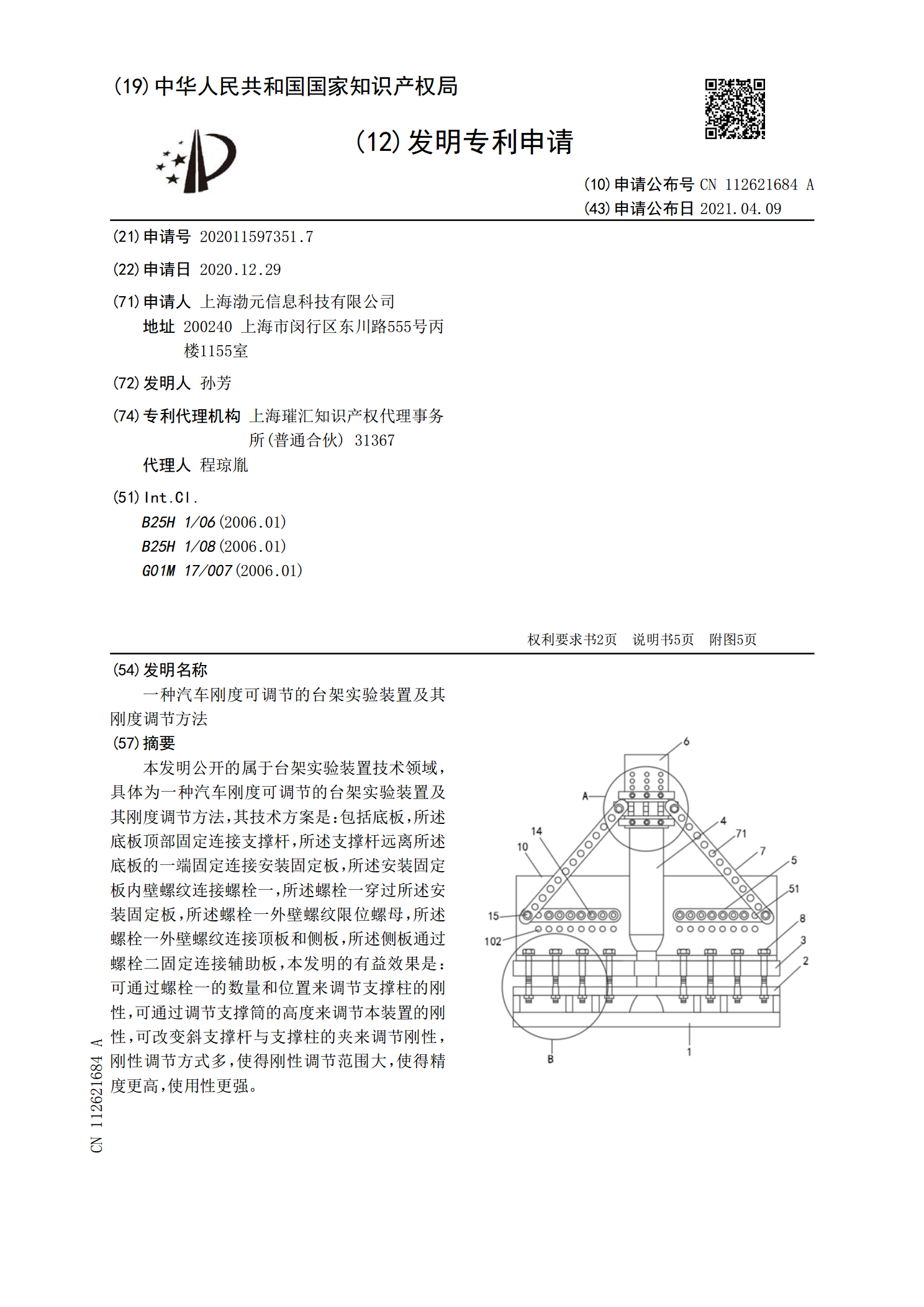
本发明公开的属于台架实验装置技术领域,具体为一种汽车刚度可调节的台架实验装置及其刚度调节方法,其技术方案是:包括底板,所述底板顶部固定连接支撑杆,所述支撑杆远离所述底板的一端固定连接安装固定板,所述安装固定板内壁螺纹连接螺栓一,所述螺栓一穿过所述安装固定板,所述螺栓一外壁螺纹限位螺母,所述螺栓一外壁螺纹连接顶板和侧板,所述侧板通过螺栓二固定连接辅助板,本发明的有益效果是:可通过螺栓一的数量和位置来调节支撑柱的刚性,可通过调节支撑筒的高度来调节本装置的刚性,可改变斜支撑杆与支撑柱的夹来调节刚性,刚性调节方式

电机升降调节装置.pdf
本发明涉及一种电机升降调节装置,包括机台,机台上活动设置有垫板,垫板中设置有竖向长腰孔,长腰孔中穿透设置有横向螺栓,横向螺栓的前端与机台相螺纹连接,机台中设置有竖向孔,竖向孔中穿透设置有竖向螺栓,竖向螺栓的顶端与垫板下部相接触,竖向螺栓上设置有上螺母和下螺母,上螺母位于竖向孔的上方,下螺母位于竖向孔的下方。本发明无需重新卸装电机就能实现张紧皮带轮的目的。