
基于二维混合模型的静态输出反馈鲁棒重复控制的任务书.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于二维混合模型的静态输出反馈鲁棒重复控制的任务书.docx
基于二维混合模型的静态输出反馈鲁棒重复控制的任务书任务书:基于二维混合模型的静态输出反馈鲁棒重复控制1.背景概述随着现代控制技术的不断发展,机械系统的精度和稳定性要求越来越高。然而,由于系统自身的非线性以及外部环境的干扰等因素,机械系统的重复控制效果难以满足要求。为了克服这一问题,人们提出了重复控制算法,可以针对周期性运动进行控制,提高系统的重复精度和鲁棒性。然而,传统的重复控制算法往往受到参数扰动、模型不准确等因素的影响,导致控制效果不佳。为了解决这一问题,本课题提出了基于二维混合模型的静态输出反馈鲁棒
基于h∞静态输出反馈的结构模型amd控制试验研究.doc
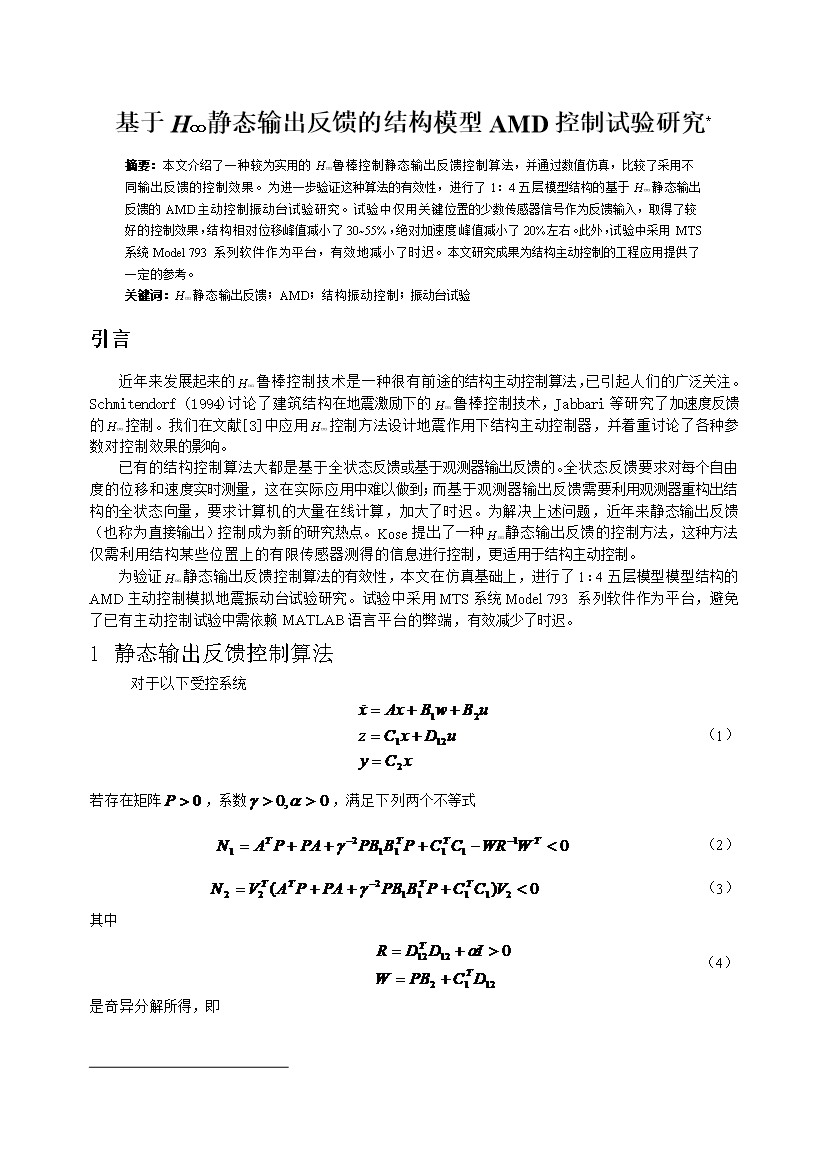
基于H∞静态输出反馈的结构模型AMD控制试验研究摘要:本文介绍了一种较为实用的H∞鲁棒控制静态输出反馈控制算法,并通过数值仿真,比较了采用不同输出反馈的控制效果。为进一步验证这种算法的有效性,进行了1:4五层模型结构的基于H∞静态输出反馈的AMD主动控制振动台试验研究。试验中仅用关键位置的少数传感器信号作为反馈输入,取得了较好的控制效果,结构相对位移峰值减小了30~55%,绝对加速度峰值减小了20%左右。此外,试验中采用MTS系统Model793系列软件作为平台,有效地减小了时迟。本文研究成果为结构主动控

基于连续--离散二维模型的周期系数线性系统鲁棒重复控制设计的任务书.docx
基于连续--离散二维模型的周期系数线性系统鲁棒重复控制设计的任务书任务书题目:基于连续--离散二维模型的周期系数线性系统鲁棒重复控制设计任务目的:了解并掌握周期系数线性系统的基本概念,掌握连续--离散二维模型的基本理论和方法,掌握鲁棒重复控制的基本原理和设计方法。任务内容:1.周期系数线性系统基本概念及特征分析:(1)周期系数线性系统的基本概念及表示方法。(2)周期信号及周期函数的基本概念。(3)周期系数线性系统的特征分析,包括相位响应、幅频响应、群延迟等。2.连续--离散二维模型基本理论:(1)复平面及

基于BMI方法的静态输出反馈控制设计的开题报告.docx
基于BMI方法的静态输出反馈控制设计的开题报告一、研究背景及意义提高人类健康水平和生活质量是当今社会的重要任务,在静态输出反馈控制技术中,基于BMI方法的控制算法已被广泛应用于肌肉麻痹患者康复治疗以及人机交互领域。其中,BMI技术通过解析人脑信号,实现将人脑与计算机系统进行有效连接,使残疾人群体能够用自身信号控制计算机,并实现肢体的运动,促进患者能够重新感知和控制肢体。而静态输出反馈控制技术则采用具有前瞻性的算法,通过反馈人类实际行为到计算机,再根据设定的目标输出相应的反馈信号,从而实现对人类行为的调节和

基于BMI方法的静态输出反馈控制设计的中期报告.docx
基于BMI方法的静态输出反馈控制设计的中期报告1.研究背景与意义随着社会经济的发展和人口结构的变化,肥胖症在全世界范围内愈演愈烈,已经成为全球性的公共卫生问题。肥胖症有着严重的健康风险,例如心血管疾病、糖尿病、高血压、癌症等。BMI(身体质量指数)是一种评估肥胖状况的重要指标,计算公式为BMI=体重(kg)/身高(m)的平方。在此背景下,设计一种基于BMI方法的反馈控制系统,可以更好地控制和预防肥胖症的发生,对于社会的健康和经济发展具有重要意义。2.研究目的和内容本文旨在建立一种基于BMI方法的静态输出反