
伸缩臂式高空作业车的关键控制技术研究的任务书.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

伸缩臂式高空作业车的关键控制技术研究的任务书.docx
伸缩臂式高空作业车的关键控制技术研究的任务书一、研究的背景随着经济社会的快速发展,城市和建筑物高度不断增加,高空作业需求日益增长。高空作业车作为一种常用的高空作业设备,能够在高空进行维修、清洁、安装和搬运等工作。为了提高高空作业效率和安全性,采用伸缩臂式高空作业车是一种良好的选择。然而,伸缩臂式高空作业车在工作过程中需要进行精准的控制和操作,以确保高空工作安全、高效。二、研究的目的和意义伸缩臂式高空作业车以其优秀的工作能力,被广泛用于电力、通信、建筑和维护等领域。然而,由于高空作业车的高度和复杂性,一旦出

高空作业车伸缩式作业臂.pdf
本发明公开了一种高空作业车伸缩式作业臂,包括带空腔的大臂、弹性绳一和弹性绳二,所述大臂的空腔内部设置有带空腔的二臂,所述二臂的空腔内部设置有小臂,所述大臂空腔底部与所述二臂之间设置有伸缩液压缸,所述弹性绳一的一端固定在大臂空腔底部,所述弹性绳一的另一端绕过安装在所述二臂上端的滑轮一固定在所述小臂底端,所述弹性绳二的一端固定在大臂上端,所述弹性绳二的另一端绕过安装在所述大臂空腔底部的滑轮二固定在所述小臂底端。本发明具有以下特点:设计合理,动作平稳,无刚性冲击,作业高度大,伸缩速度高,缩回后体积小,适用范围广
一种多级臂伸缩式高空作业车臂架伸缩系统.pdf
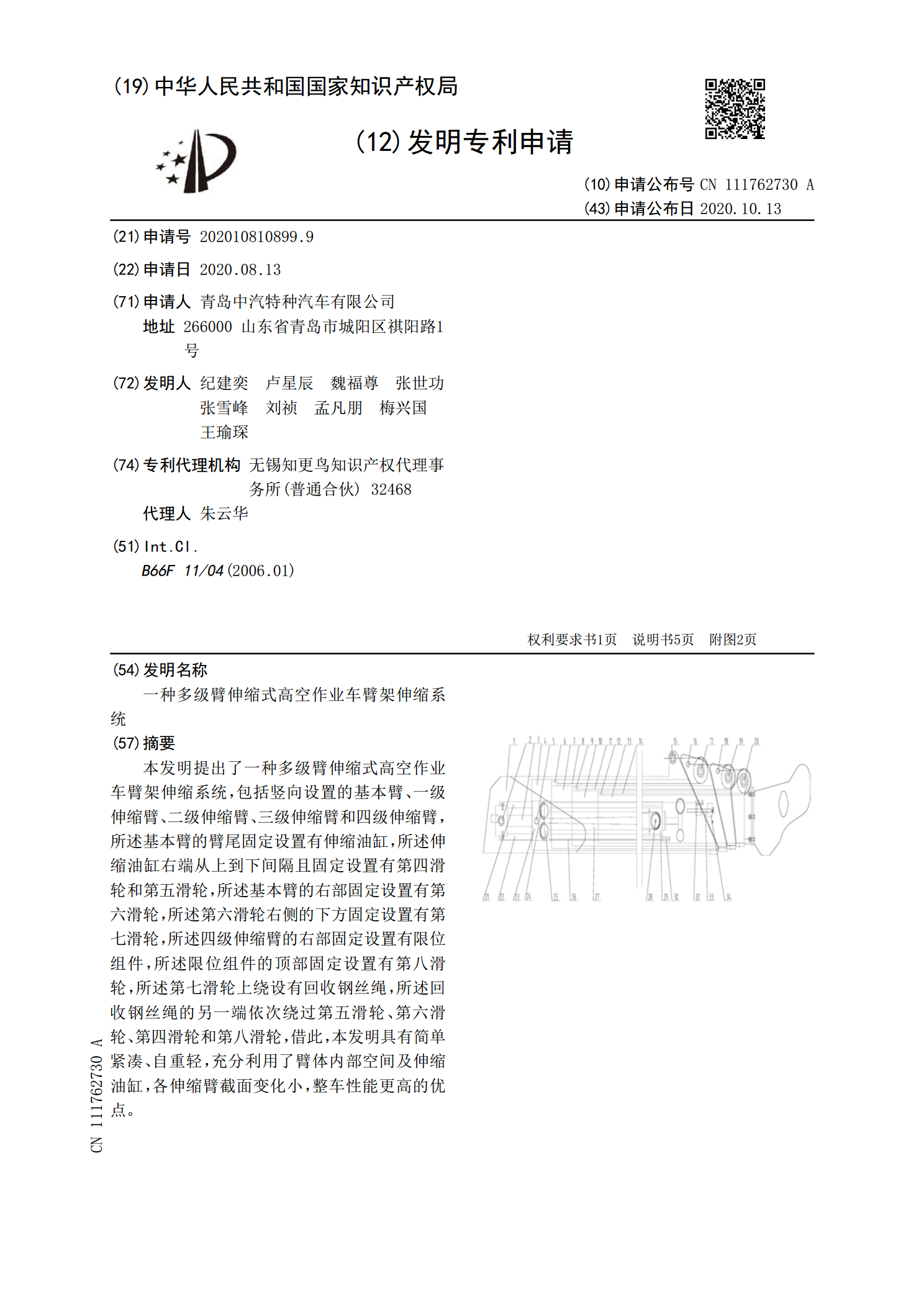
本发明提出了一种多级臂伸缩式高空作业车臂架伸缩系统,包括竖向设置的基本臂、一级伸缩臂、二级伸缩臂、三级伸缩臂和四级伸缩臂,所述基本臂的臂尾固定设置有伸缩油缸,所述伸缩油缸右端从上到下间隔且固定设置有第四滑轮和第五滑轮,所述基本臂的右部固定设置有第六滑轮,所述第六滑轮右侧的下方固定设置有第七滑轮,所述四级伸缩臂的右部固定设置有限位组件,所述限位组件的顶部固定设置有第八滑轮,所述第七滑轮上绕设有回收钢丝绳,所述回收钢丝绳的另一端依次绕过第五滑轮、第六滑轮、第四滑轮和第八滑轮,借此,本发明具有简单紧凑、自重轻,

伸缩臂高空作业车臂架振动主动控制方法研究.doc
伸缩臂高空作业车臂架振动主动控制方法研究高空作业车作为一种运送人员到指定位置作业、营救被困伤员的设备,是现代城市消防中的必要装备。考虑到高空作业车载人为主的工作特点,对其作业过程中的振动进行主动控制以保证平稳性和安全性具有重要意义。本文以伸缩臂高空作业车为研究对象,通过对变幅液压系统的稳定性和臂架系统振动特性展开研究,基于自适应控制理论构建闭环系统,实现对臂架振动的主动控制。主要研究内容如下:首先,研究了伸缩臂高空作业车变幅系统中变幅液压缸的伸缩与变幅角的关系,针对伸缩臂高空作业车变幅液压系统,建立了变幅

伸缩臂高空作业车臂架变幅振动抑制研究的任务书.docx
伸缩臂高空作业车臂架变幅振动抑制研究的任务书任务书一、任务背景和目的伸缩臂高空作业车是一种常见的用于高空作业的特种设备。其具有灵活性高、作业范围广等优点,广泛应用于建筑、电力等行业。然而,在作业过程中,臂架的变幅振动问题成为制约作业效率和安全的重要因素。因此,为了提高作业效率和减少事故发生的风险,对伸缩臂高空作业车臂架变幅振动进行抑制研究具有重要意义。本次研究的目的在于通过分析伸缩臂高空作业车臂架变幅振动的原因,设计有效的抑制方法,减少振动对作业效果和安全的影响。具体任务如下:二、任务内容1.收集伸缩臂高