
铰链四杆机构.ppt

15****92


1/10
2/10
3/10

4/10

5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共35页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

铰链四杆机构.ppt
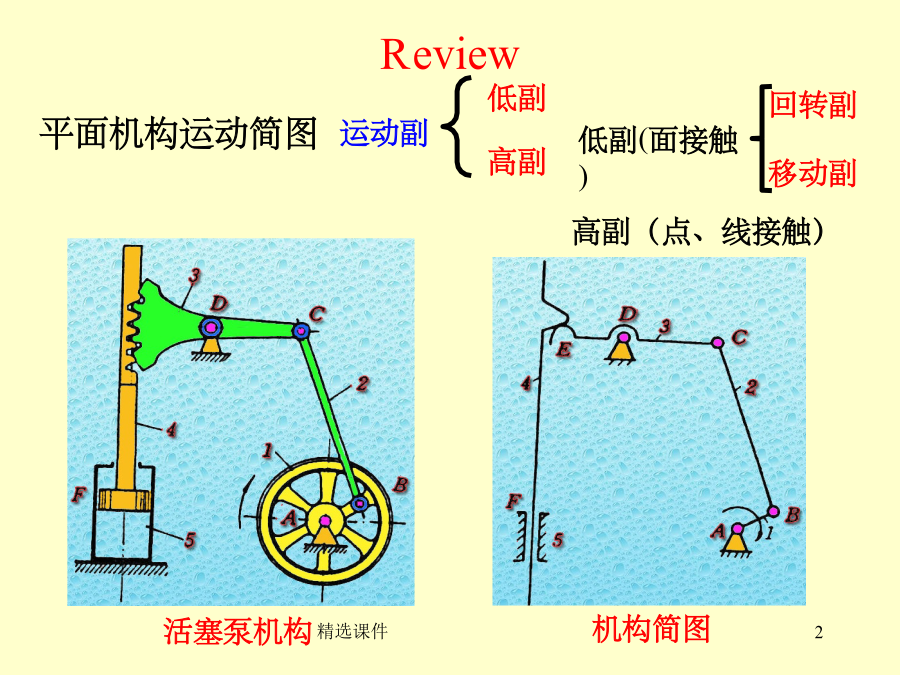
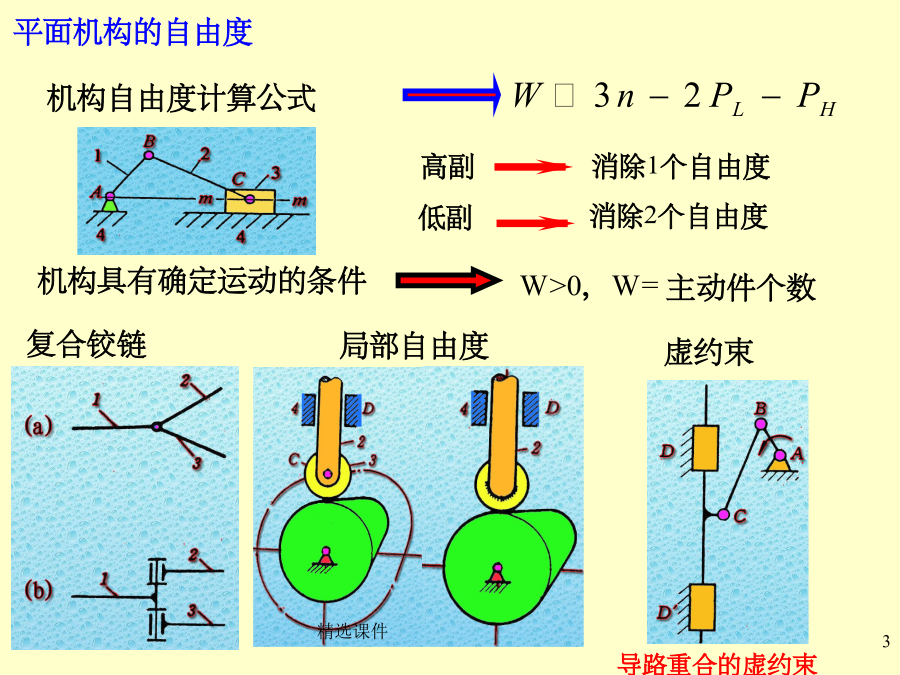
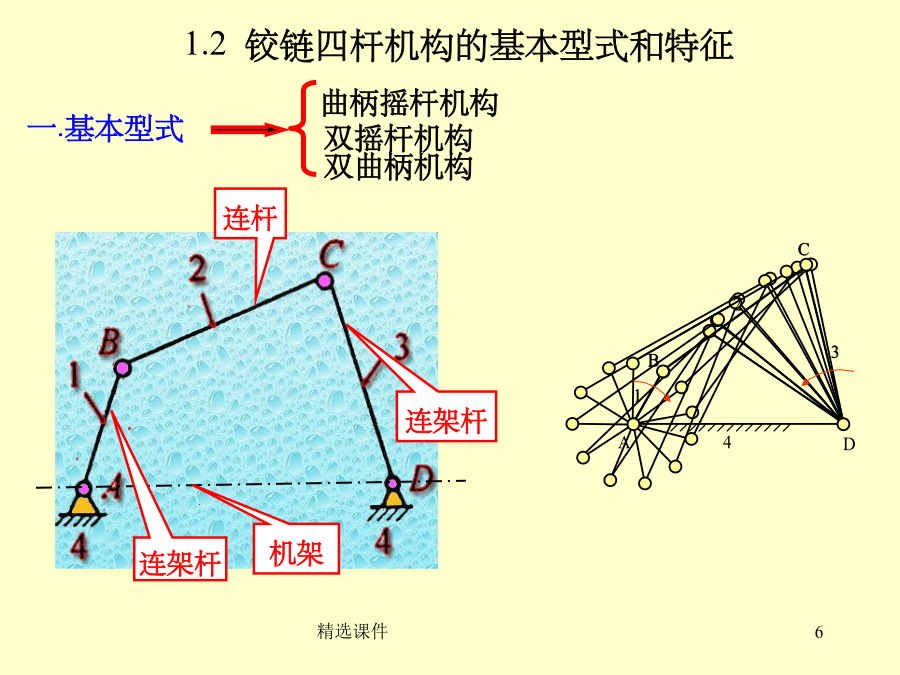
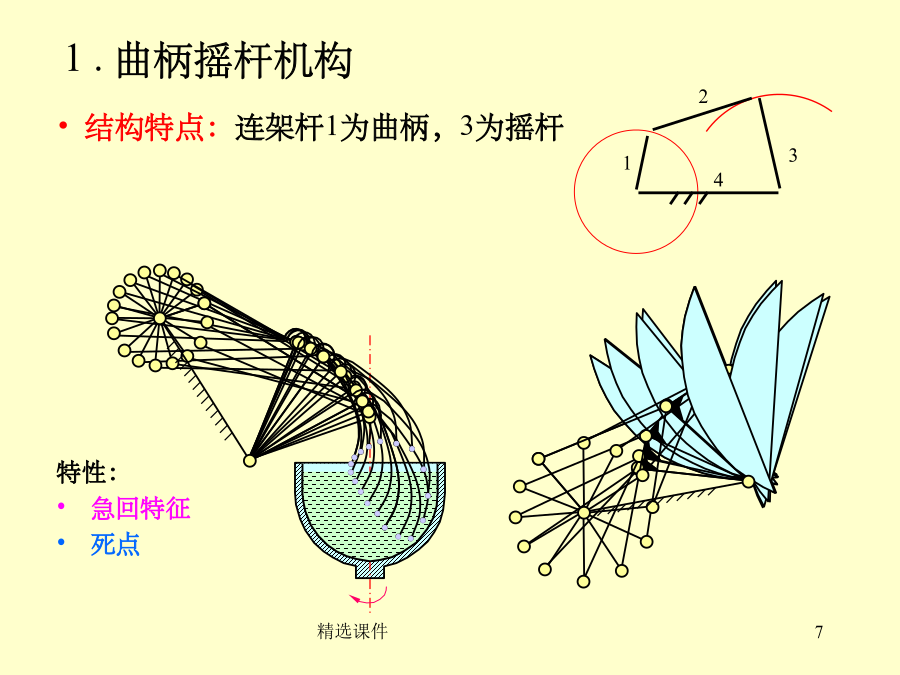
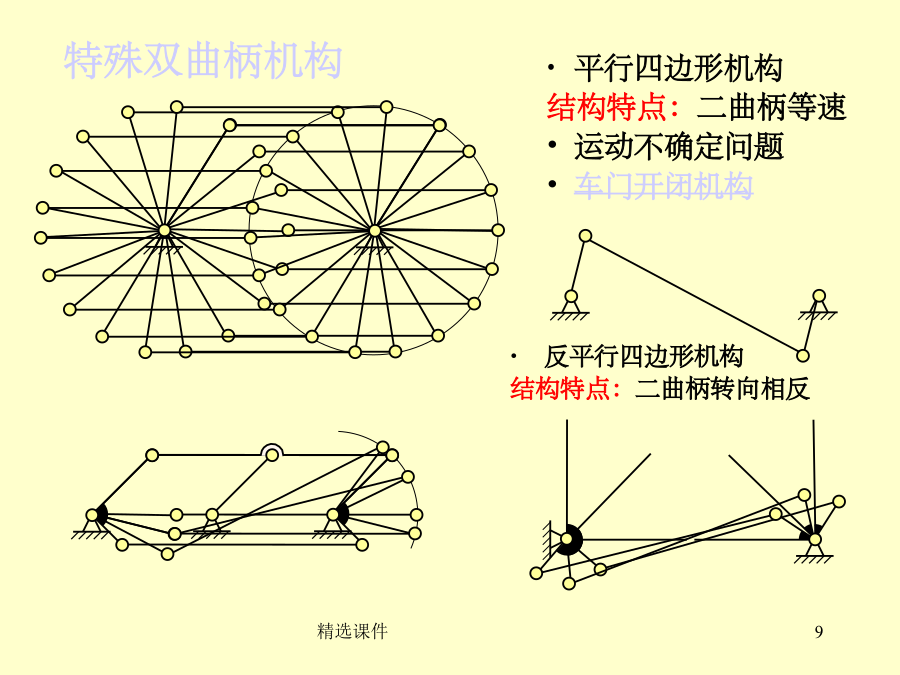
机械学基础课程电子教案Review平面机构的自由度习题1:计算机构的自由度平面连杆机构的基本型式是铰链四杆机构其余四杆机构均是由铰链四杆机构演化而成的1.2铰链四杆机构的基本型式和特征特殊双曲柄机构(3)双摇杆机构2.双曲柄机构二.铰链四杆机构曲柄存在条件变更机架后机构的演化推论1:当Lmax+LminL(其余两杆长度之和)时最短杆是连架杆之一——曲柄摇杆机构最短杆是机架——双曲柄机构最短杆是连杆——双摇杆机构推论2:当Lmax+Lmin>L(其余两杆长度之和)时——双摇杆机构三.铰链四杆机构的特性死点
铰链四杆机构.ppt
平面连杆机构与分类平面连机构的组成连架杆分类曲柄摇杆机构曲柄摇杆机构实例应用实例双曲柄机构常见的双曲柄机构平行双曲柄机构平行双曲柄机构应用实例反向双曲柄机构应用实例小结双摇杆机构应用实例习题急回特性急回特性应用特点应用铰链四杆机构的演化及应用曲柄滑块机构示意图四杆机构演化定义曲柄滑块机构应用实例偏心轮机构偏心轮极位应用实例应用实例:颚式破碎机导杆机构转动导杆机应用摆动导杆机构应用:牛头刨床移动导杆机构应用:压力水井曲柄摇块机构应用习题
铰链四杆机构.ppt
铰链四杆机构铰链四杆机构的组成起重机铰链四杆机构类型的判断例题已知四杆机构各杆的长度为45、70、100、120,当以最短杆相邻的杆为机架时,则该机构属于什么类型的机构?判断图示四杆机构是什么机构?(单项选择题)(1)A曲柄摇杆机构B双曲柄机构C双摇杆机构(2)A曲柄摇杆机构B双曲柄机构C双摇杆机构(3)A曲柄摇杆机构B双曲柄机构C双摇杆机构(4)A曲柄摇杆机构B双曲柄机构C双摇杆机构如图所示,设已知四杆机构各构件的长度为a=240mm,b=600mm,c=400mm,d=500mm。试问:当取杆4为机架

铰链四杆机构.ppt
知识回顾铰链四杆机构的组成与分类新知传递新知传递知识链接新知传递知识链接知识链接新知传递知识链接动画演示新知传递新知传递新知传递归纳总结知识链接知识链接知识链接知识链接知识链接知识链接课堂小结组成课堂小结连架杆与机架中必有一个是最短杆Yes

铰链四杆机构.doc
学科《机械基础》教者孙铭课题7.4铰链四杆机构的演化班级08102课型新授课教具投影仪授课日期12月22日学习目标1、曲柄滑块机构的原理及演化形式2、导杆机构教学重点曲柄滑块机构和导杆机构的演化教学难点曲柄滑块机构教学方法讲解、讨论、练习教学程序教学内容教学活动教师活动学生活动复习铰链四杆机构的判断提问个别回答新课引入在生产实际中,除了应用铰链四杆机构的三种形式之外,还广泛地采用其它形式的四杆机构,可以认为是通过改变某些结构形式、相对长度,或不同的构件作为机架等方法,来的到铰链四杆机构的一些其他形式的演化