
基于联合仿真的智能车辆路径跟踪控制研究的中期报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于联合仿真的智能车辆路径跟踪控制研究的中期报告.docx
基于联合仿真的智能车辆路径跟踪控制研究的中期报告一、研究背景和意义随着智能交通技术的不断发展,汽车驾驶技术也在不断地提高。智能车辆是指能够通过车联网、传感器、控制算法等技术手段,实现自主驾驶的汽车,具有高效、安全、环保的特点。智能车辆路径跟踪控制是智能车辆自主驾驶技术中的一个重要环节,是智能车辆实现自动化驾驶的基础。本研究旨在基于联合仿真的方法,探索智能车辆路径跟踪控制的关键技术,并通过仿真实验验证算法的可行性和有效性。研究成果对于智能车辆的自主驾驶技术和智能交通系统的发展具有重要意义。二、研究内容和进展

基于RRT与MPC的智能车辆路径规划与跟踪控制研究.docx
基于RRT与MPC的智能车辆路径规划与跟踪控制研究基于RRT与MPC的智能车辆路径规划与跟踪控制研究摘要:智能车辆的路径规划与跟踪控制是自动驾驶领域的核心问题之一。本文以基于RRT(Rapidly-ExploringRandomTree)和MPC(ModelPredictiveControl)的智能车辆路径规划与跟踪控制为研究对象,提出了一种综合应用该两种方法的路径规划与控制策略,并在车辆仿真平台上进行实验验证。结果表明,该方法在确保车辆运行的安全性和稳定性的同时,提高了路径规划的效率和控制的准确性。关键
基于反馈纯跟踪的智能车辆路径跟随控制方法.pdf
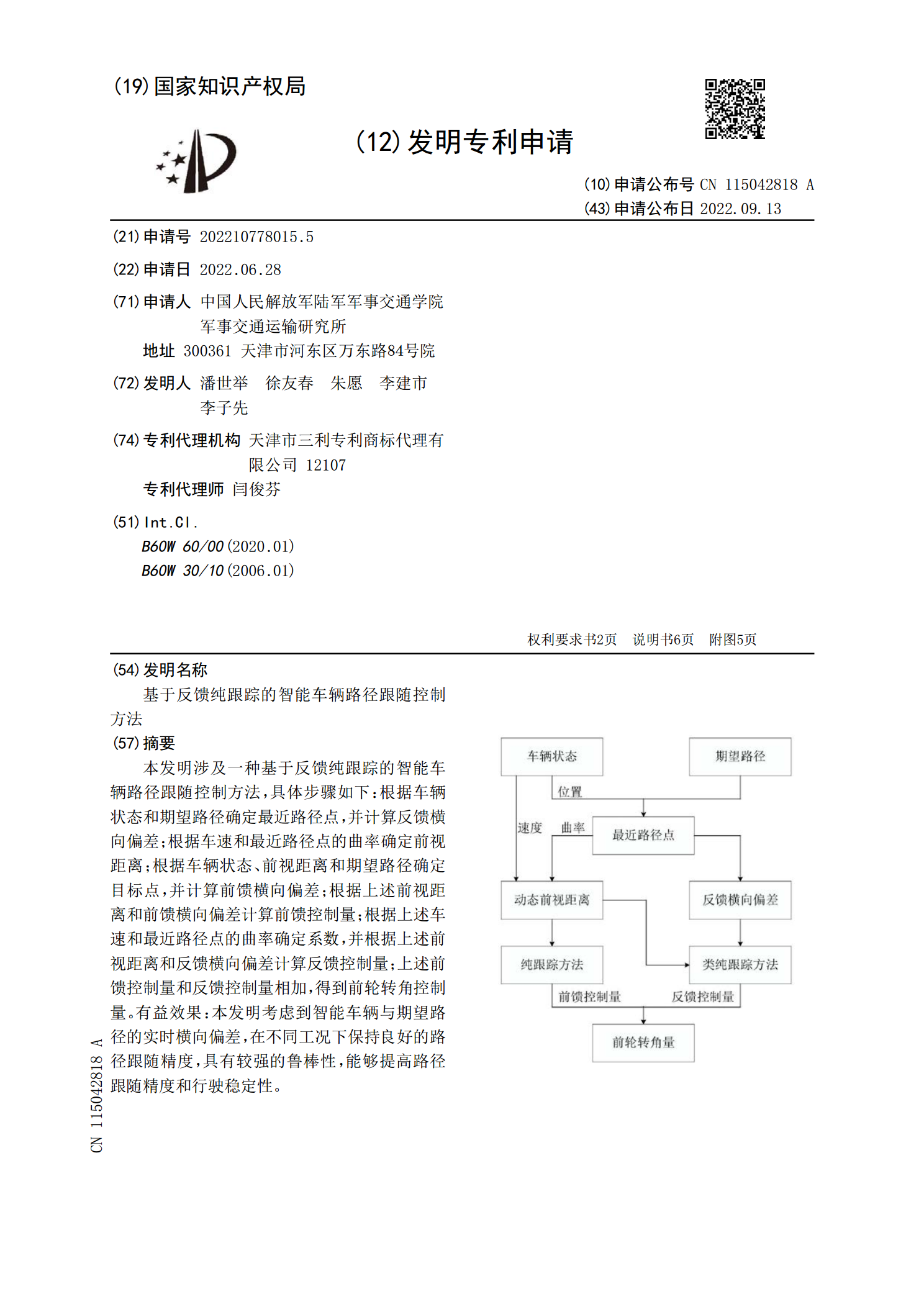
本发明涉及一种基于反馈纯跟踪的智能车辆路径跟随控制方法,具体步骤如下:根据车辆状态和期望路径确定最近路径点,并计算反馈横向偏差;根据车速和最近路径点的曲率确定前视距离;根据车辆状态、前视距离和期望路径确定目标点,并计算前馈横向偏差;根据上述前视距离和前馈横向偏差计算前馈控制量;根据上述车速和最近路径点的曲率确定系数,并根据上述前视距离和反馈横向偏差计算反馈控制量;上述前馈控制量和反馈控制量相加,得到前轮转角控制量。有益效果:本发明考虑到智能车辆与期望路径的实时横向偏差,在不同工况下保持良好的路径跟随精度,

考虑路面影响的智能车辆路径跟踪控制研究.pptx
汇报人:目录PARTONEPARTTWO不同路面类型对车辆行驶性能的影响路面特征对车辆动力学模型的影响路面条件对车辆控制系统设计的要求PARTTHREE基于神经网络的路径跟踪控制算法考虑路面附着系数的路径跟踪控制算法基于模糊逻辑的路径跟踪控制算法算法比较与优化PARTFOUR路面信息感知技术路面信息融合处理方法实时路面状况评估路面信息数据库的建立与更新PARTFIVE实验场景设计与搭建实验过程与数据采集性能评估指标与方法实验结果分析与讨论PARTSIX智能车辆在复杂路面条件下的应用前景技术挑战与解决方案未

基于双目视觉的智能车辆路径识别方法研究的中期报告.docx
基于双目视觉的智能车辆路径识别方法研究的中期报告1.研究背景随着智能交通系统的不断发展,自动驾驶技术成为了智能交通系统的重要组成部分之一。而自动驾驶技术的基础在于车辆的路径识别。因此,研究基于双目视觉的智能车辆路径识别方法具有重要的应用价值。2.研究目的本研究旨在探究基于双目视觉的智能车辆路径识别方法。通过采用双目视觉、图像处理和机器学习等技术,实现车辆在复杂环境下的路径识别,为智能交通系统的自动驾驶技术提供技术支持。3.研究方法(1)采集双目视觉数据使用一对双目相机对车辆行驶的路径进行捕捉。该相机对的基