
基于反馈纯跟踪的智能车辆路径跟随控制方法.pdf

努力****骞北

1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于反馈纯跟踪的智能车辆路径跟随控制方法.pdf
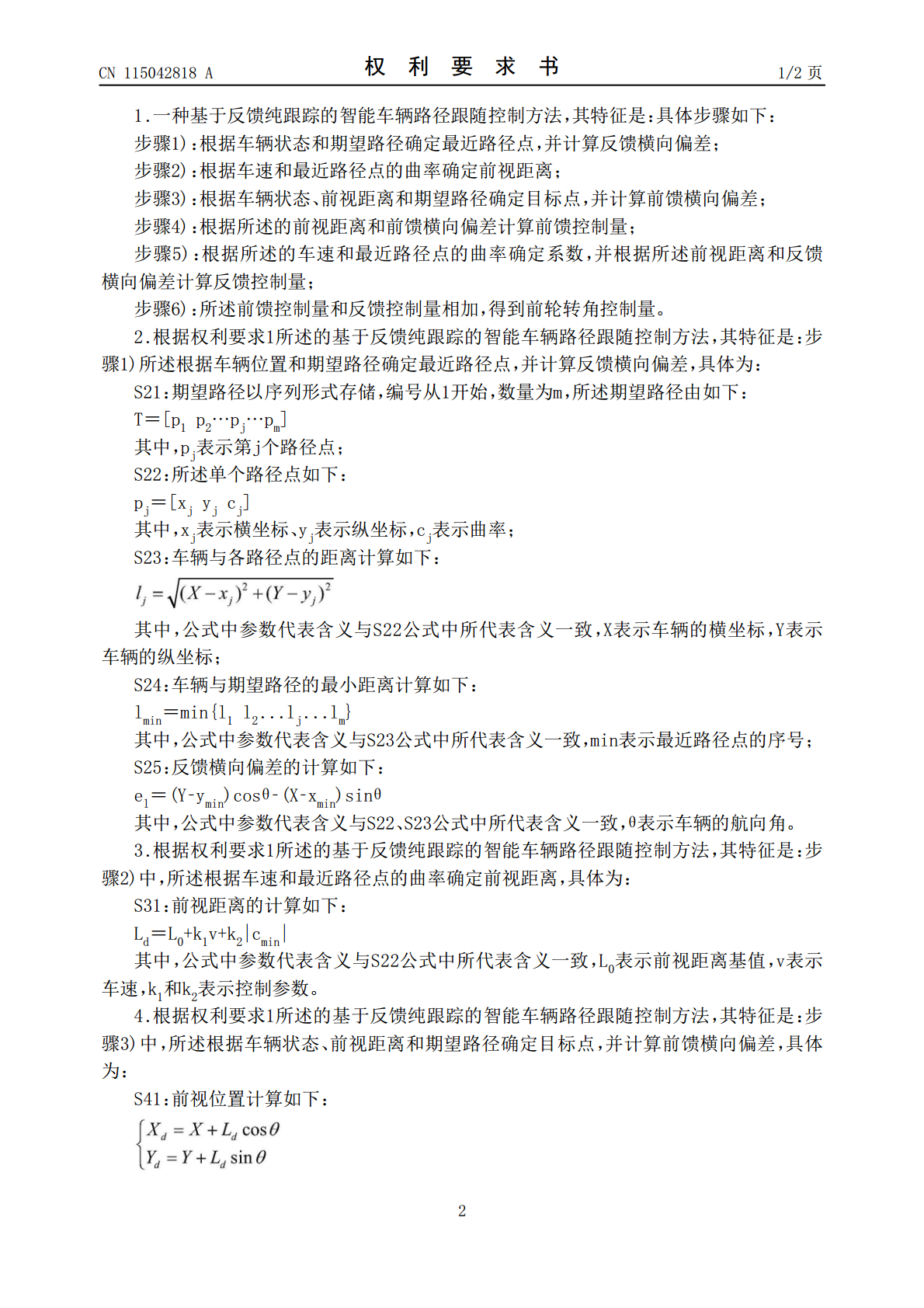
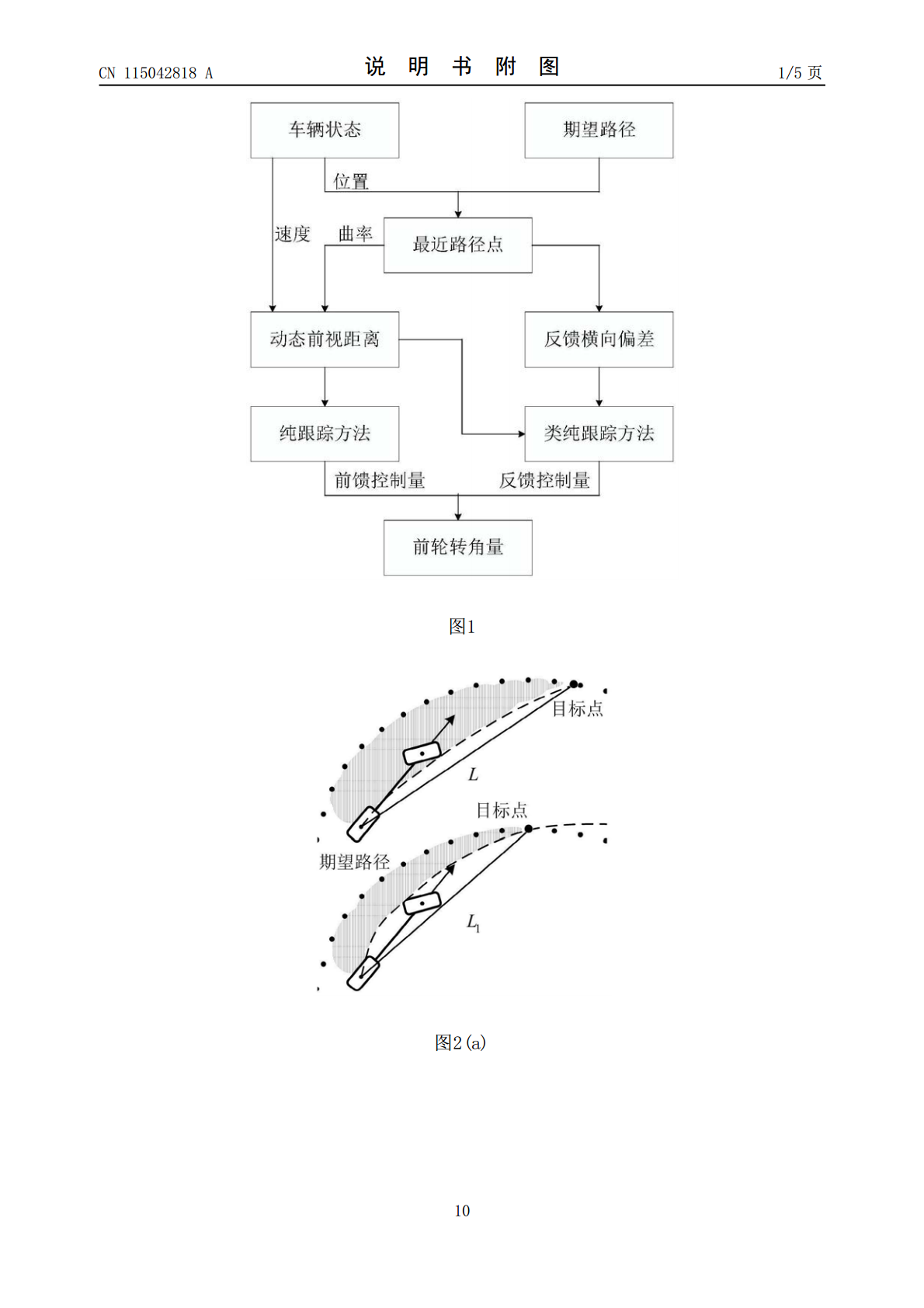
本发明涉及一种基于反馈纯跟踪的智能车辆路径跟随控制方法,具体步骤如下:根据车辆状态和期望路径确定最近路径点,并计算反馈横向偏差;根据车速和最近路径点的曲率确定前视距离;根据车辆状态、前视距离和期望路径确定目标点,并计算前馈横向偏差;根据上述前视距离和前馈横向偏差计算前馈控制量;根据上述车速和最近路径点的曲率确定系数,并根据上述前视距离和反馈横向偏差计算反馈控制量;上述前馈控制量和反馈控制量相加,得到前轮转角控制量。有益效果:本发明考虑到智能车辆与期望路径的实时横向偏差,在不同工况下保持良好的路径跟随精度,
一种纯跟踪智能车路径跟随控制方法.pdf
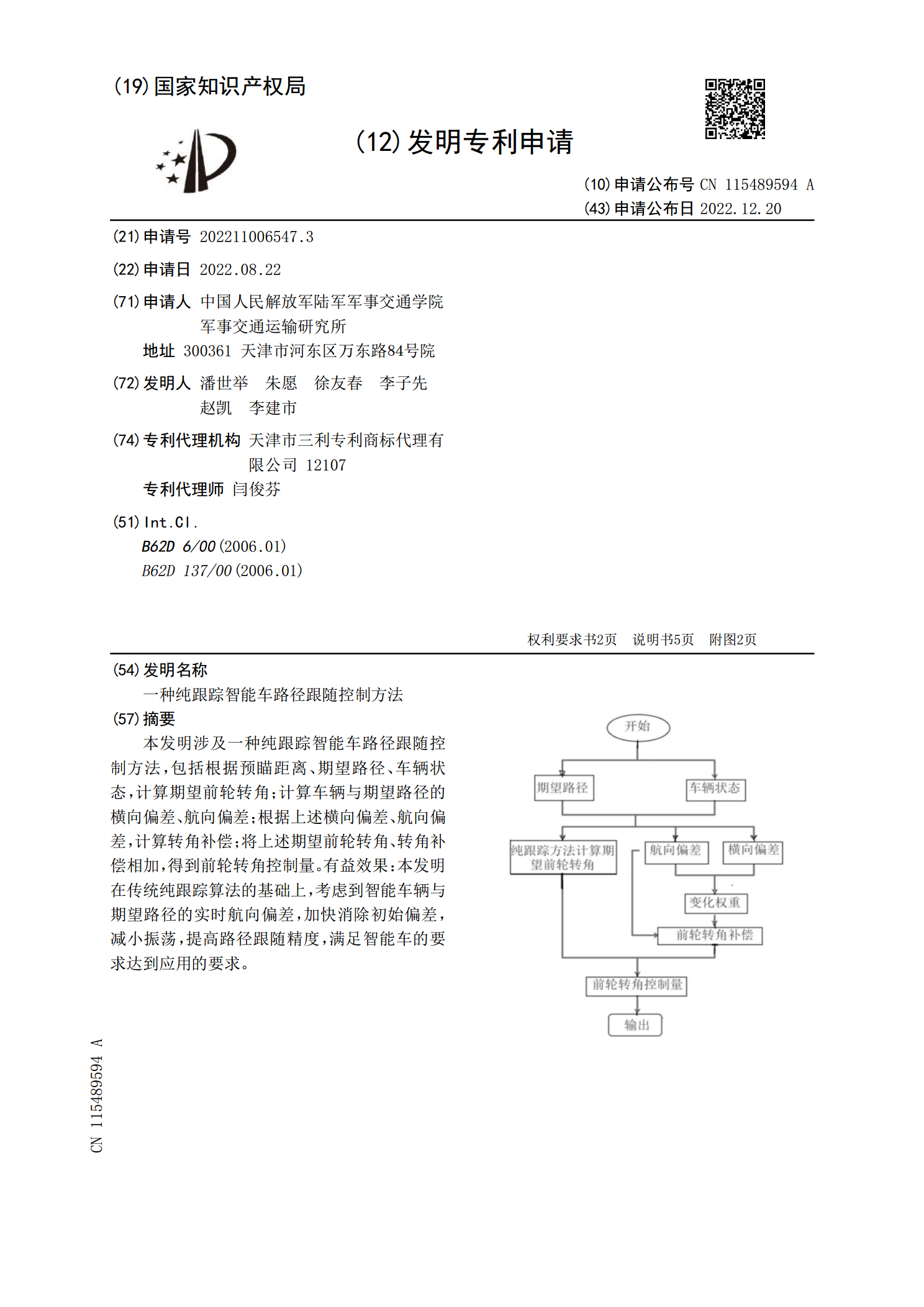
本发明涉及一种纯跟踪智能车路径跟随控制方法,包括根据预瞄距离、期望路径、车辆状态,计算期望前轮转角;计算车辆与期望路径的横向偏差、航向偏差;根据上述横向偏差、航向偏差,计算转角补偿;将上述期望前轮转角、转角补偿相加,得到前轮转角控制量。有益效果:本发明在传统纯跟踪算法的基础上,考虑到智能车辆与期望路径的实时航向偏差,加快消除初始偏差,减小振荡,提高路径跟随精度,满足智能车的要求达到应用的要求。

智能车队的路径跟踪与纵向跟随控制.pptx
汇报人:CONTENTS添加章节标题智能车队系统概述智能车队系统的定义和作用智能车队系统的应用场景和优势智能车队系统的研究意义路径跟踪控制算法路径跟踪控制算法的原理和分类路径跟踪控制算法的实现方法和步骤路径跟踪控制算法的优缺点和改进方向纵向跟随控制算法纵向跟随控制算法的原理和分类纵向跟随控制算法的实现方法和步骤纵向跟随控制算法的优缺点和改进方向智能车队系统实验验证实验环境和测试条件实验结果和分析结果与现有技术的比较和讨论总结与展望本文工作总结未来研究方向和展望汇报人:

基于LQR的智能车辆路径跟踪控制研究.docx
基于LQR的智能车辆路径跟踪控制研究引言车辆是人类交通工具的重要组成部分之一,它的安全性、效率和智能化水平,直接关系到交通运输的发展和进步。智能车辆是近年来交通领域发展的热点和重点,其引领着行业的技术革新和发展。其中,路径跟踪控制技术是智能车辆关键技术之一,在完善车辆自动驾驶功能和提高车辆行驶安全性上具有重要作用。本文旨在探讨基于LQR的智能车辆路径跟踪控制,并结合实际案例进行论述。一、智能车辆路径跟踪控制技术研究1.1路径规划智能车辆需要进行路径规划,才能确定前进方向和选择行驶路线。路径规划是通过车辆传

基于LQR的智能车辆路径跟踪控制研究.docx
基于LQR的智能车辆路径跟踪控制研究智能车辆路径跟踪控制是智能交通系统研究的重要领域之一。在现代交通系统中,路径跟踪控制的效果直接影响着车辆的安全性、稳定性和舒适性。本文将以基于线性二次调节器(LQR)的智能车辆路径跟踪控制研究为题,探讨该控制方法在路径跟踪中的应用。首先,我们需要明确路径跟踪控制的目标。路径跟踪控制的主要目标是使车辆能够按照给定的路径精确地行驶,同时保持良好的稳定性和舒适性。为了实现这一目标,研究者们提出了众多的路径跟踪控制方法,其中LQR是其中一种常用的方法。LQR是一种优化控制方法,