
一种基于重力自平衡的自动调平方法及装置.pdf

飞飙****ng


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于重力自平衡的自动调平方法及装置.pdf
本发明提出了一种基于重力自平衡的自动调平方法及装置。本发明以能发挥重力自平衡力矩作用的工作斗悬挂方式为结构基础,采用了配置有安全离合器的行星齿轮系作为执行机构,进而实施主动助力调平控制的方法及装置。调平机构具有调平驱动省力、动态响应快、过程平稳、精度高等优点;通过安全离合器,当自动调平出现超调或故障时,触发安全离合器开启动作,调平系统被动转化为重力自平衡调平的安全模式,实现了调平系统的本质安全;调平系统还具有工作斗受到瞬态扰动、负载冲击时的系统安全保护和及时自恢复自动调平运行的功能。本发明能有效提高调平系

一种全域自平衡重力卸载装置.pdf
本发明公开了一种全域自平衡重力卸载装置,其包括支撑架、悬挂装置、固定架、悬挂重物平台、三条结构完全相同的连接分支,三条分支对称分布连接固定平台和悬挂物体平台,每条分支由滑块、第一转动轴、第一连杆、第二转动轴、第二连杆、第三转动轴组成,移动副与固定平台成固定夹角,各分支转动副轴线与移动副轴线平行,固定架、三个连接分支和悬挂重物平台共同构成一种力输入输出映射关系不变的结构。本发明能够在保持配重块质量不变的情况下,在工作空间内悬挂物体平台沿任意轨迹运动即全域内可以实现自平衡重力。
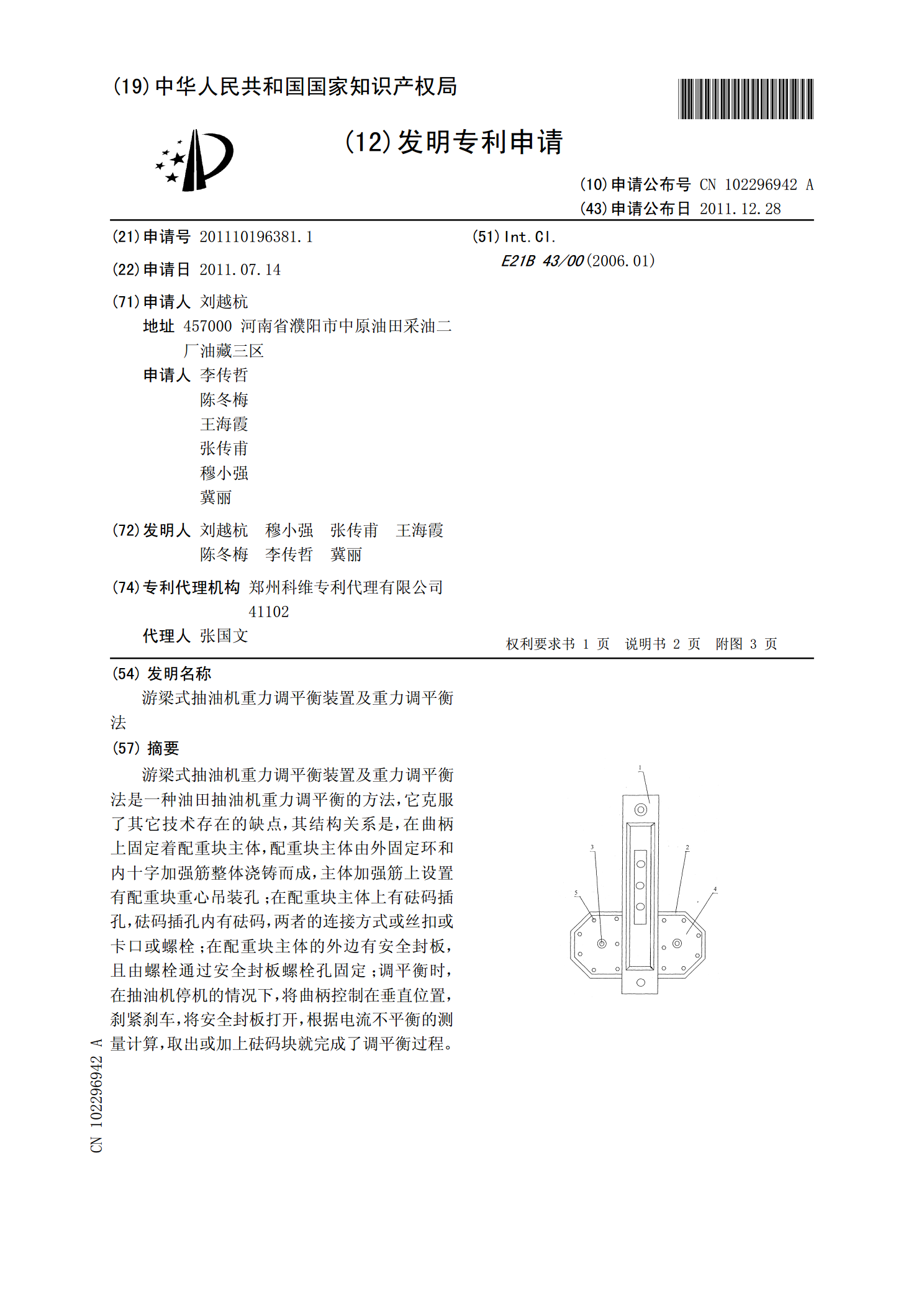
游梁式抽油机重力调平衡装置及重力调平衡法.pdf
游梁式抽油机重力调平衡装置及重力调平衡法是一种油田抽油机重力调平衡的方法,它克服了其它技术存在的缺点,其结构关系是,在曲柄上固定着配重块主体,配重块主体由外固定环和内十字加强筋整体浇铸而成,主体加强筋上设置有配重块重心吊装孔;在配重块主体上有砝码插孔,砝码插孔内有砝码,两者的连接方式或丝扣或卡口或螺栓;在配重块主体的外边有安全封板,且由螺栓通过安全封板螺栓孔固定;调平衡时,在抽油机停机的情况下,将曲柄控制在垂直位置,刹紧刹车,将安全封板打开,根据电流不平衡的测量计算,取出或加上砝码块就完成了调平衡过程。
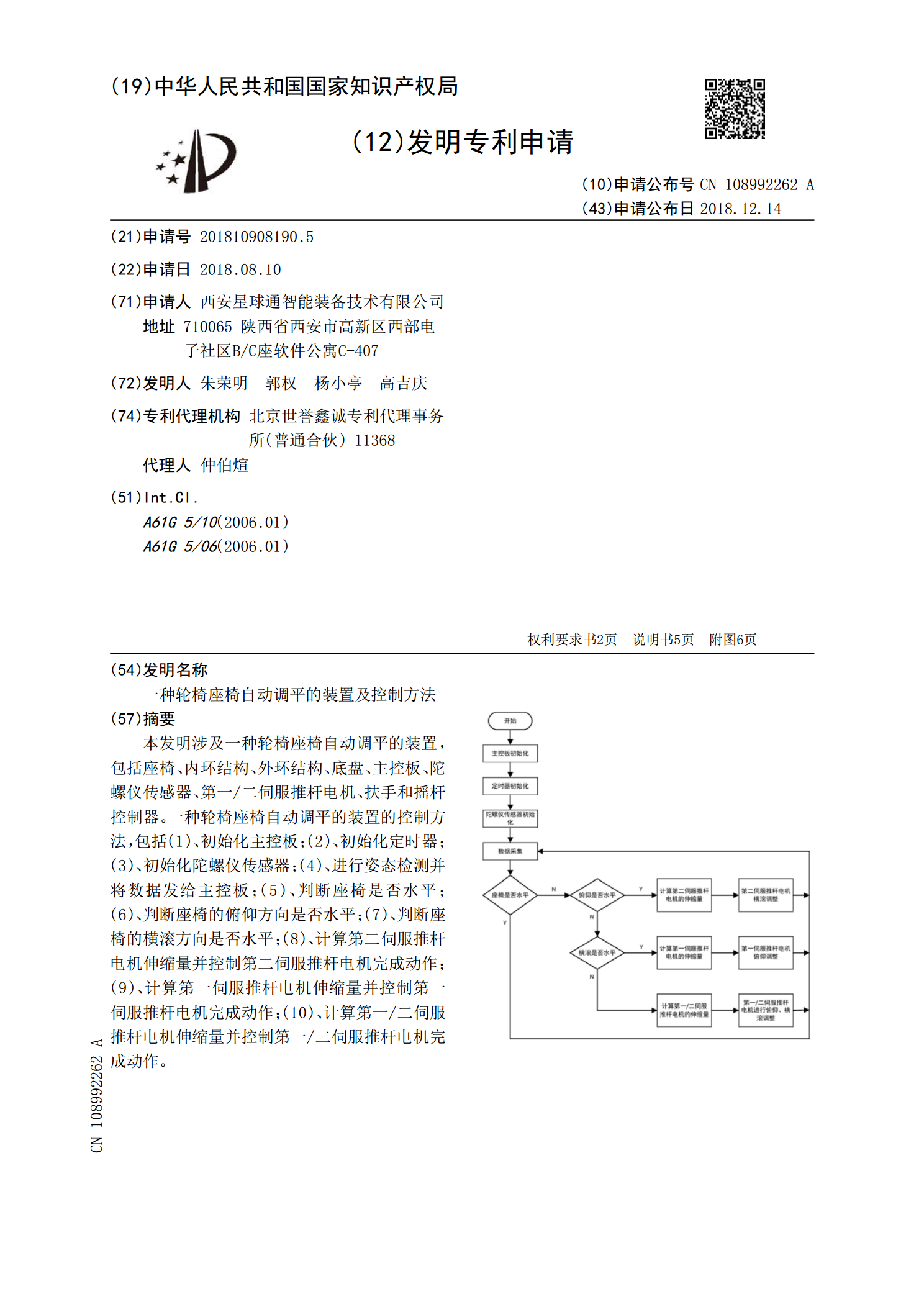
一种轮椅座椅自动调平的装置及控制方法.pdf
本发明涉及一种轮椅座椅自动调平的装置,包括座椅、内环结构、外环结构、底盘、主控板、陀螺仪传感器、第一/二伺服推杆电机、扶手和摇杆控制器。一种轮椅座椅自动调平的装置的控制方法,包括(1)、初始化主控板;(2)、初始化定时器;(3)、初始化陀螺仪传感器;(4)、进行姿态检测并将数据发给主控板;(5)、判断座椅是否水平;(6)、判断座椅的俯仰方向是否水平;(7)、判断座椅的横滚方向是否水平;(8)、计算第二伺服推杆电机伸缩量并控制第二伺服推杆电机完成动作;(9)、计算第一伺服推杆电机伸缩量并控制第一伺服推杆电机
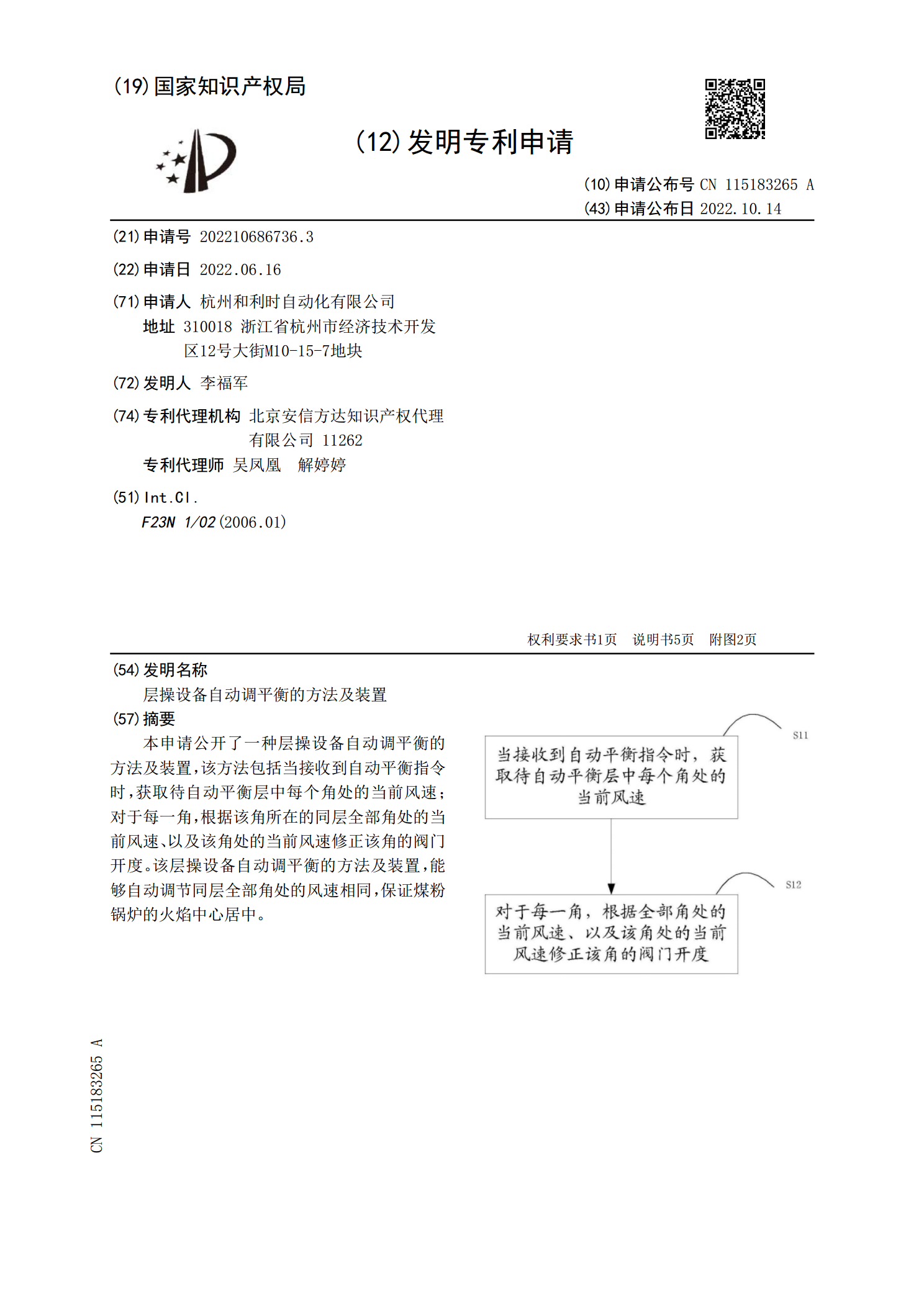
层操设备自动调平衡的方法及装置.pdf
本申请公开了一种层操设备自动调平衡的方法及装置,该方法包括当接收到自动平衡指令时,获取待自动平衡层中每个角处的当前风速;对于每一角,根据该角所在的同层全部角处的当前风速、以及该角处的当前风速修正该角的阀门开度。该层操设备自动调平衡的方法及装置,能够自动调节同层全部角处的风速相同,保证煤粉锅炉的火焰中心居中。