
一种自平衡两轮车的运动控制方法.pdf

雨巷****轶丽


1/7
2/7

3/7
4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种自平衡两轮车的运动控制方法.pdf
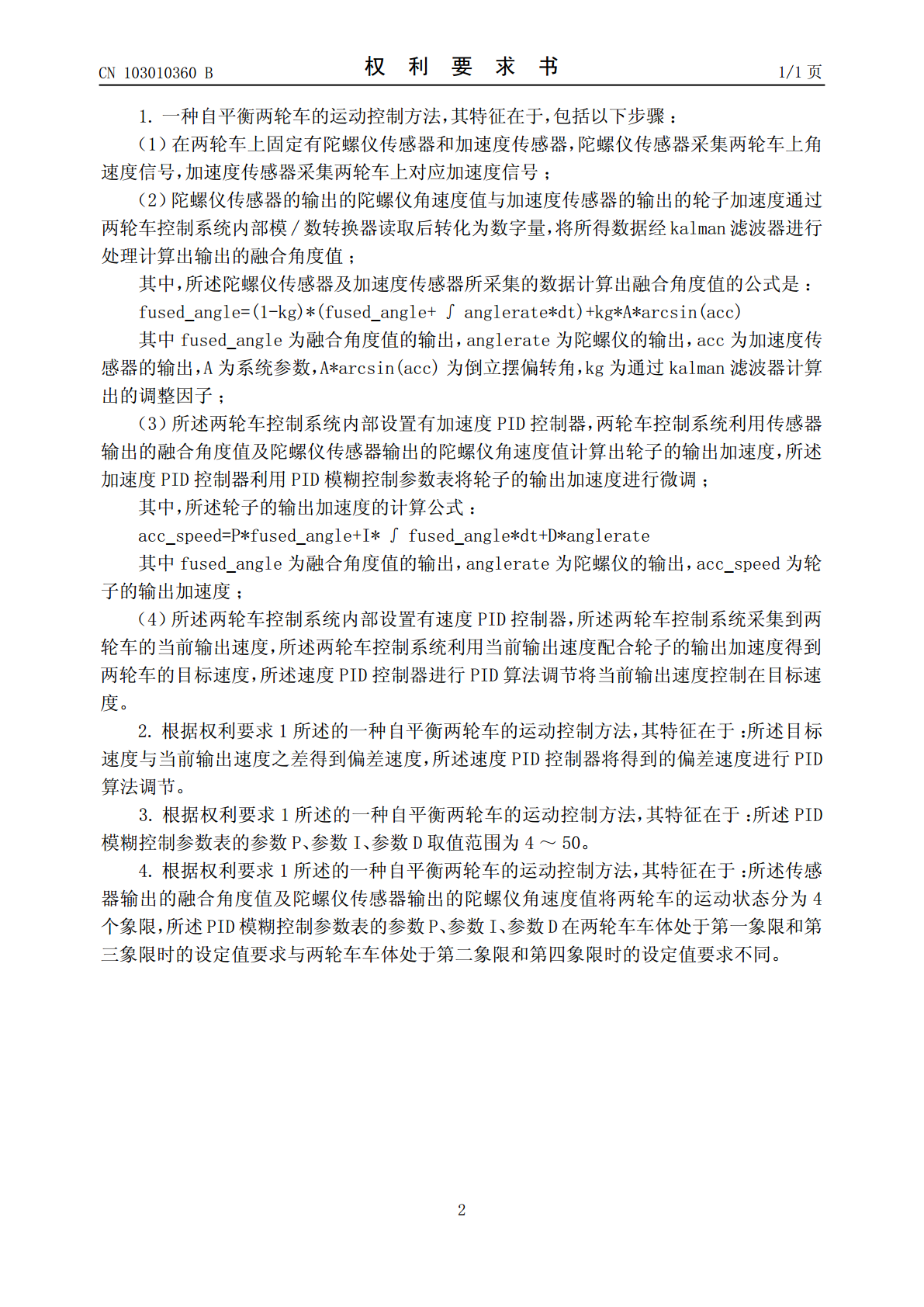
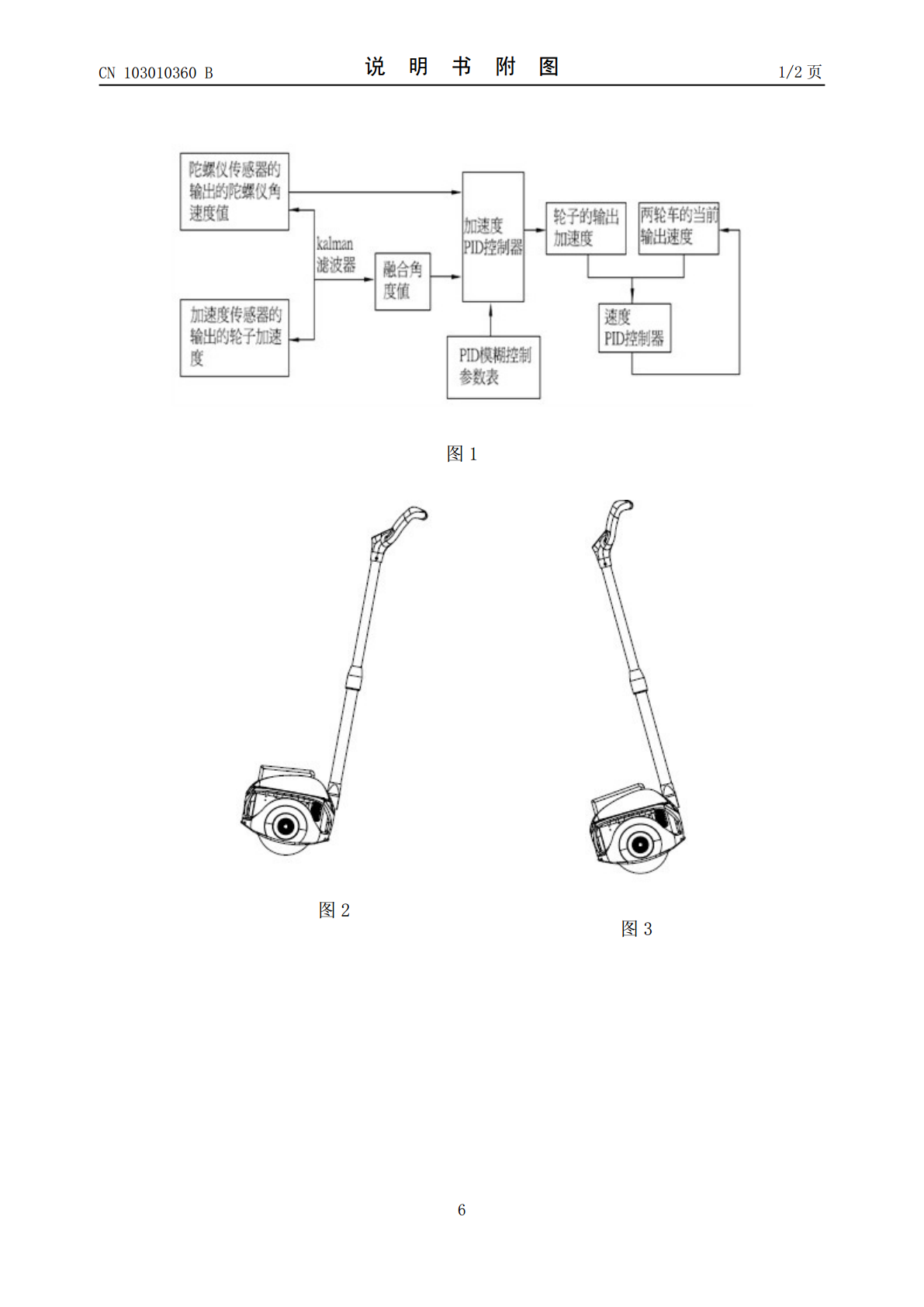
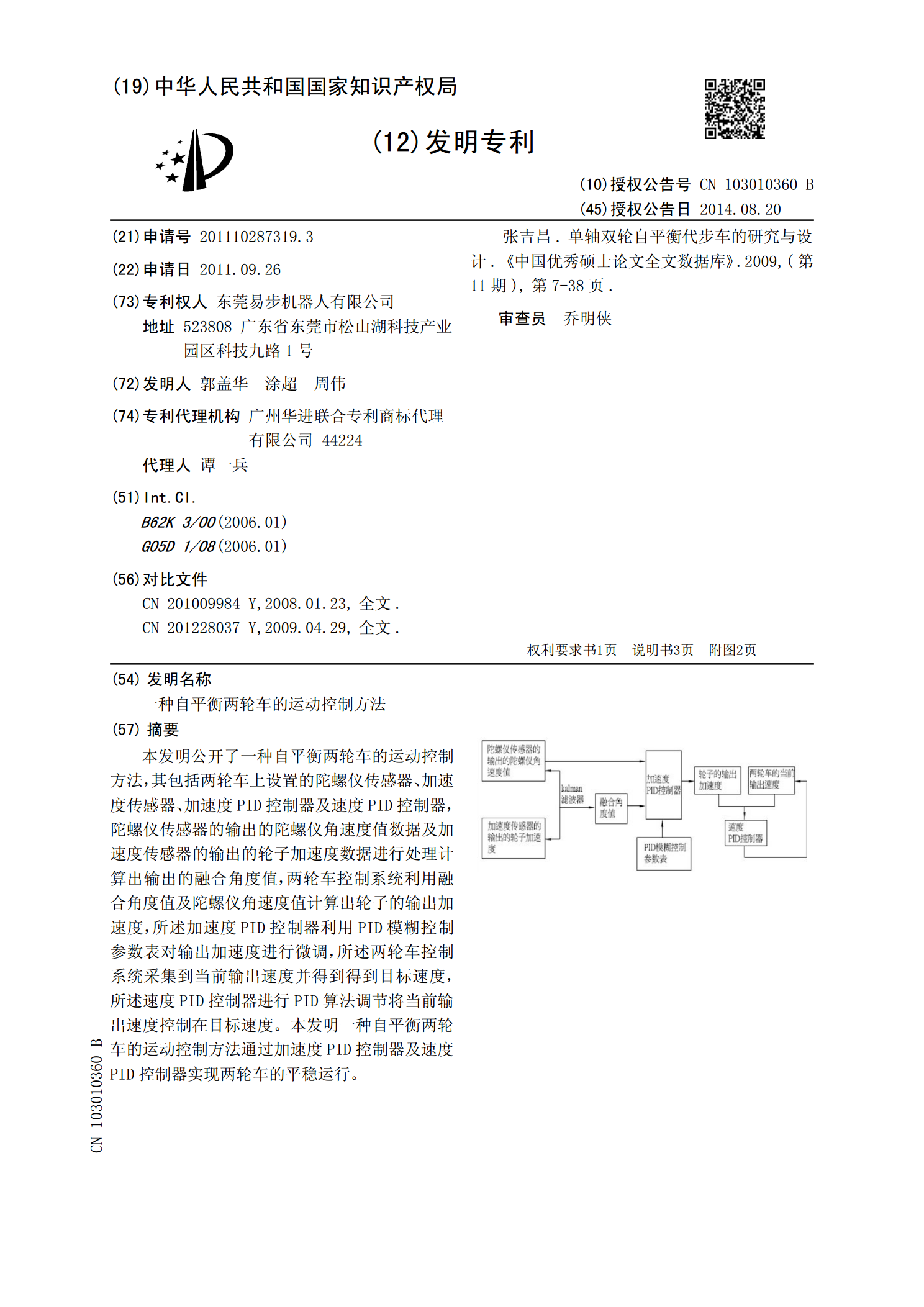
本发明公开了一种自平衡两轮车的运动控制方法,其包括两轮车上设置的陀螺仪传感器、加速度传感器、加速度PID控制器及速度PID控制器,陀螺仪传感器的输出的陀螺仪角速度值数据及加速度传感器的输出的轮子加速度数据进行处理计算出输出的融合角度值,两轮车控制系统利用融合角度值及陀螺仪角速度值计算出轮子的输出加速度,所述加速度PID控制器利用PID模糊控制参数表对输出加速度进行微调,所述两轮车控制系统采集到当前输出速度并得到得到目标速度,所述速度PID控制器进行PID算法调节将当前输出速度控制在目标速度。本发明一种自平
一种两轮自平衡智能车姿态控制方法.pdf
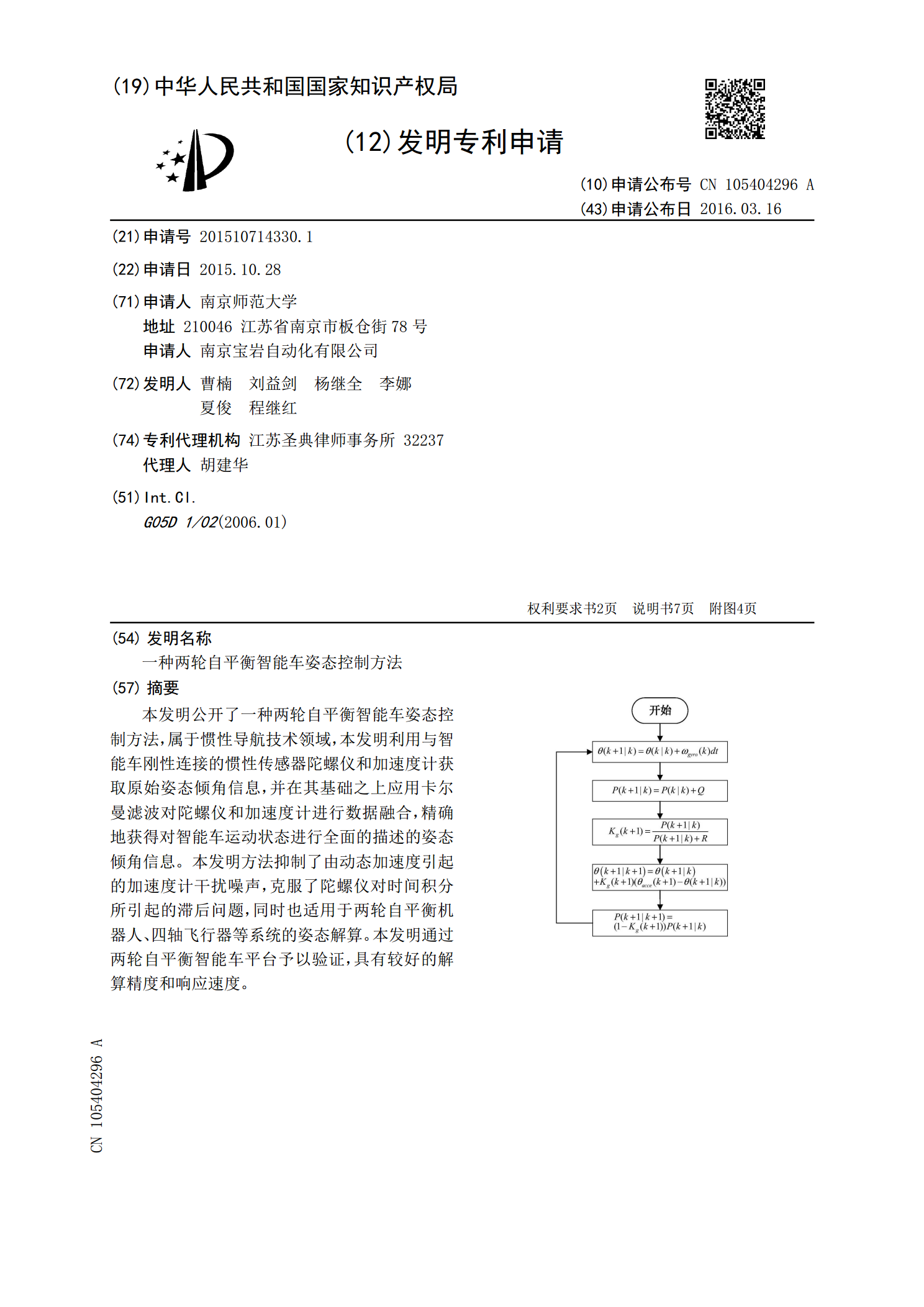
本发明公开了一种两轮自平衡智能车姿态控制方法,属于惯性导航技术领域,本发明利用与智能车刚性连接的惯性传感器陀螺仪和加速度计获取原始姿态倾角信息,并在其基础之上应用卡尔曼滤波对陀螺仪和加速度计进行数据融合,精确地获得对智能车运动状态进行全面的描述的姿态倾角信息。本发明方法抑制了由动态加速度引起的加速度计干扰噪声,克服了陀螺仪对时间积分所引起的滞后问题,同时也适用于两轮自平衡机器人、四轴飞行器等系统的姿态解算。本发明通过两轮自平衡智能车平台予以验证,具有较好的解算精度和响应速度。
两轮自平衡车的机器学习控制方法.pdf
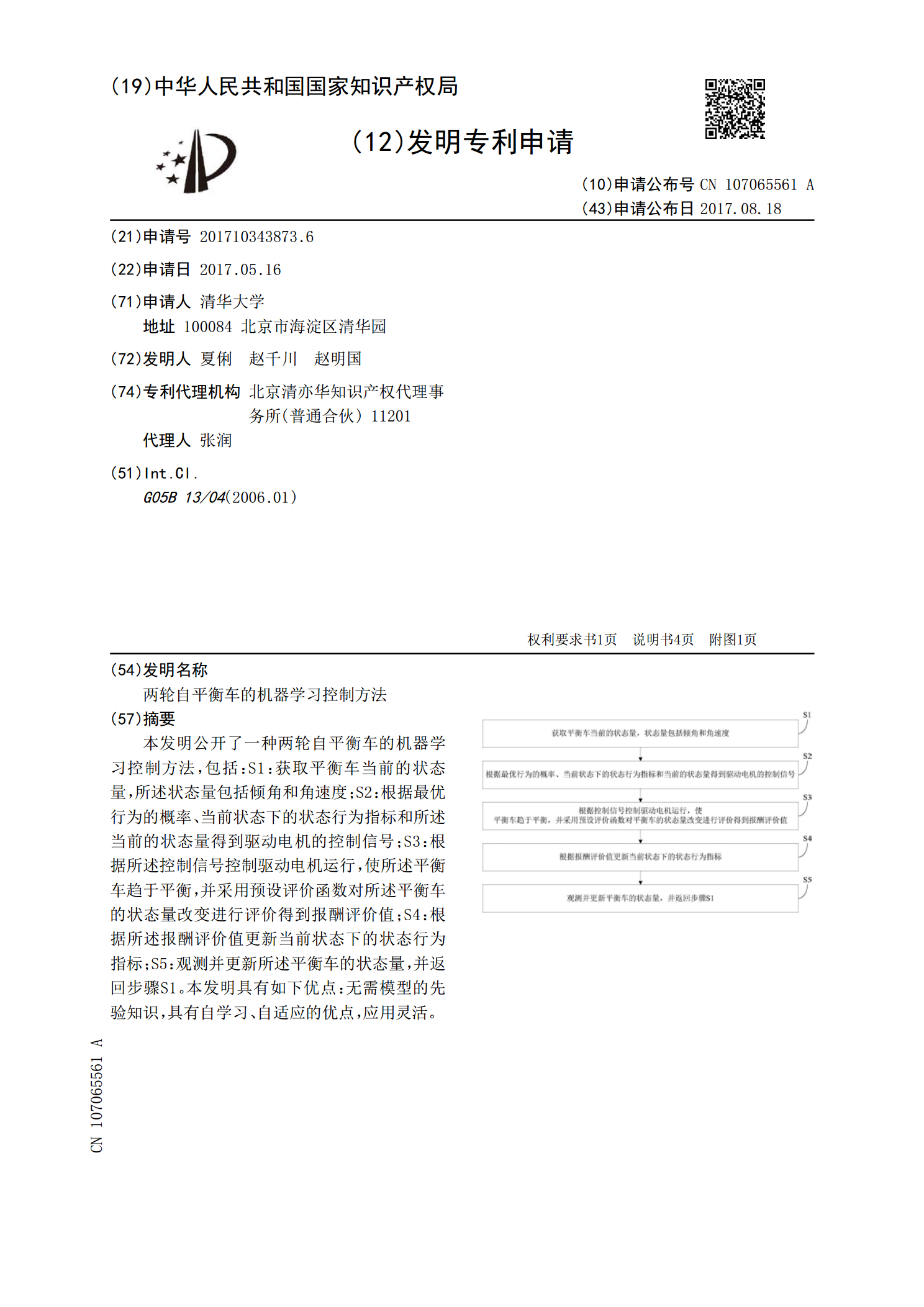
本发明公开了一种两轮自平衡车的机器学习控制方法,包括:S1:获取平衡车当前的状态量,所述状态量包括倾角和角速度;S2:根据最优行为的概率、当前状态下的状态行为指标和所述当前的状态量得到驱动电机的控制信号;S3:根据所述控制信号控制驱动电机运行,使所述平衡车趋于平衡,并采用预设评价函数对所述平衡车的状态量改变进行评价得到报酬评价值;S4:根据所述报酬评价值更新当前状态下的状态行为指标;S5:观测并更新所述平衡车的状态量,并返回步骤S1。本发明具有如下优点:无需模型的先验知识,具有自学习、自适应的优点,应用灵

两轮自平衡电动车的运动平衡控制方法研究的开题报告.docx
两轮自平衡电动车的运动平衡控制方法研究的开题报告一、研究背景和目的:随着人们生活水平的不断提高,电动车的普及率正在逐年攀升。而在电动车的发展过程中,由于传统电动车的操作不够方便,故而电动车的自平衡技术应运而生。两轮自平衡电动车是一种前后两轮单轮控制的自平衡电动车,它能够在不借助其他场地和物体的条件下进行平衡控制,这种机器人技术不仅能够提高人们的出行便利度,同时可以进行生态环境保护。因此,本研究旨在研究两轮自平衡电动车的运动平衡控制方法,为其后续的应用提供理论基础和技术支持。二、研究内容和方法:1、研究两轮

两轮自平衡电动车的运动平衡控制方法研究的中期报告.docx
两轮自平衡电动车的运动平衡控制方法研究的中期报告一、引言目前,电动车的种类繁多,其中自平衡电动车被认为是一种十分智能化、高效率、环保的交通工具。两轮自平衡电动车最初是为商业服务而设计的,如物流、保安巡逻等,但随着人们的生活水平提高,它们越来越受到普通人的喜爱。因此,如何提高两轮自平衡电动车的运动稳定性,是当前研究的热点之一。二、研究内容本次研究的主要内容是对两轮自平衡电动车的运动平衡控制方法进行深入的研究。具体而言,研究内容主要涉及以下方面:(1)分析两轮自平衡电动车的工作原理和结构特点,总结其动力系统、