
一种腱驱动的机器人手指机构.pdf

An****70


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种腱驱动的机器人手指机构.pdf
一种腱驱动的机器人手指机构,属于机器人技术领域。关节正向转动采用腱驱动、反向采用扭簧力回复驱动方式,结构简单、可靠,能够满足抓握操作的需要。基关节的轴套外部套装有基关节回复扭簧,基关节回复扭簧两端与近指节传力件和基座连接;末端关节腱轮与末端指节传力件固连,末端关节轴通过末端关节轴端轴承支撑在近指节左、右侧板上;末端指节左、右侧板通过末端指节支撑轴承支撑在近指节左、右侧板上,末端关节回复扭簧两端与末端指节传力件和近指节左侧板连接;基关节腱一端固定缠绕在基关节腱轮的轮槽内,另一端穿出基关节腱鞘;末端关节腱一端
一种手指间协同驱动机构.pdf
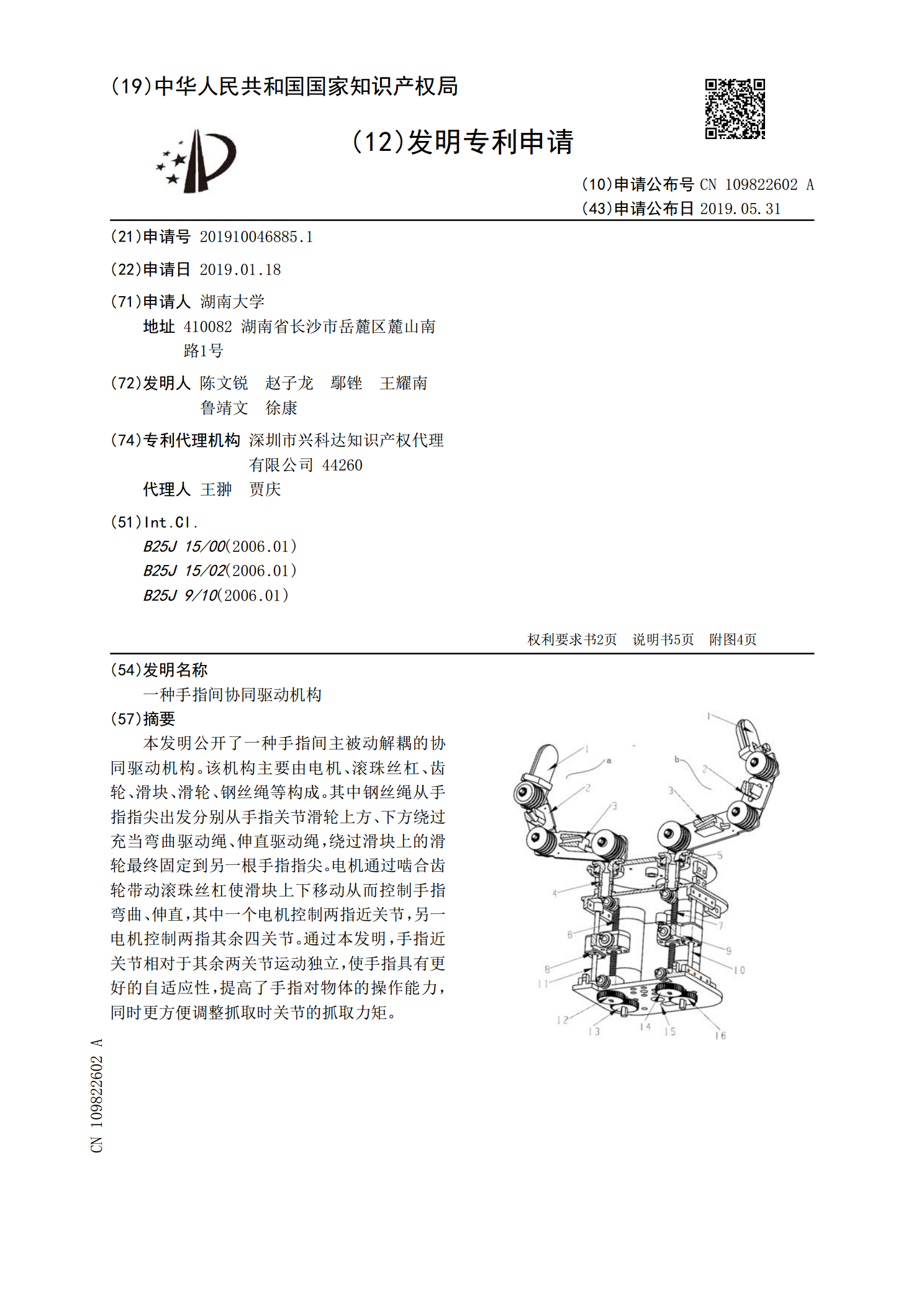
本发明公开了一种手指间主被动解耦的协同驱动机构。该机构主要由电机、滚珠丝杠、齿轮、滑块、滑轮、钢丝绳等构成。其中钢丝绳从手指指尖出发分别从手指关节滑轮上方、下方绕过充当弯曲驱动绳、伸直驱动绳,绕过滑块上的滑轮最终固定到另一根手指指尖。电机通过啮合齿轮带动滚珠丝杠使滑块上下移动从而控制手指弯曲、伸直,其中一个电机控制两指近关节,另一电机控制两指其余四关节。通过本发明,手指近关节相对于其余两关节运动独立,使手指具有更好的自适应性,提高了手指对物体的操作能力,同时更方便调整抓取时关节的抓取力矩。

蜗轮蜗杆驱动的手指机构.pdf
本发明提供了蜗轮蜗杆驱动的手指机构,电机支架设置在机械手手掌中,电机支架通过第七转轴与手指机架的一端可转动连接,手指机架的另一端设置有手指本体,第七转轴垂直于手指本体的关节转轴,第二电机固定在电机支架内,并通过第二电机的输出轴与蜗杆的一端传动连接,蜗杆的另一端与蜗轮配合,当蜗杆转动时,带动蜗轮转动,蜗轮与手指机架传动连接。本发明提供的蜗轮蜗杆驱动的手指机构,通过对手指机构、电机、拉杆、螺杆以及螺母进行特殊组装,节省轴向传动输出所占用的空间。
螺旋驱动和蜗轮蜗杆驱动的手指机构.pdf
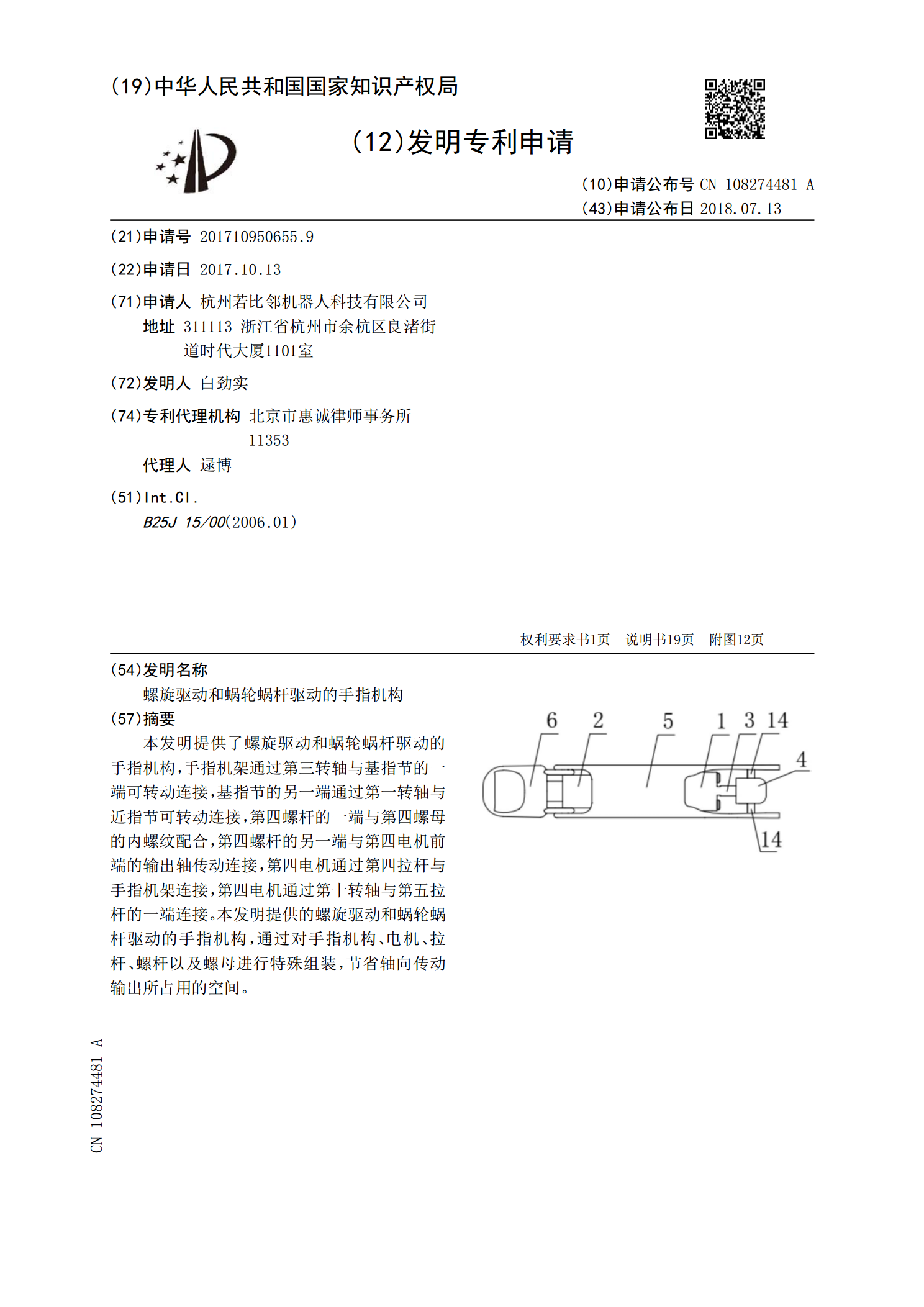
本发明提供了螺旋驱动和蜗轮蜗杆驱动的手指机构,手指机架通过第三转轴与基指节的一端可转动连接,基指节的另一端通过第一转轴与近指节可转动连接,第四螺杆的一端与第四螺母的内螺纹配合,第四螺杆的另一端与第四电机前端的输出轴传动连接,第四电机通过第四拉杆与手指机架连接,第四电机通过第十转轴与第五拉杆的一端连接。本发明提供的螺旋驱动和蜗轮蜗杆驱动的手指机构,通过对手指机构、电机、拉杆、螺杆以及螺母进行特殊组装,节省轴向传动输出所占用的空间。
螺旋驱动和蜗轮蜗杆驱动的手指机构.pdf
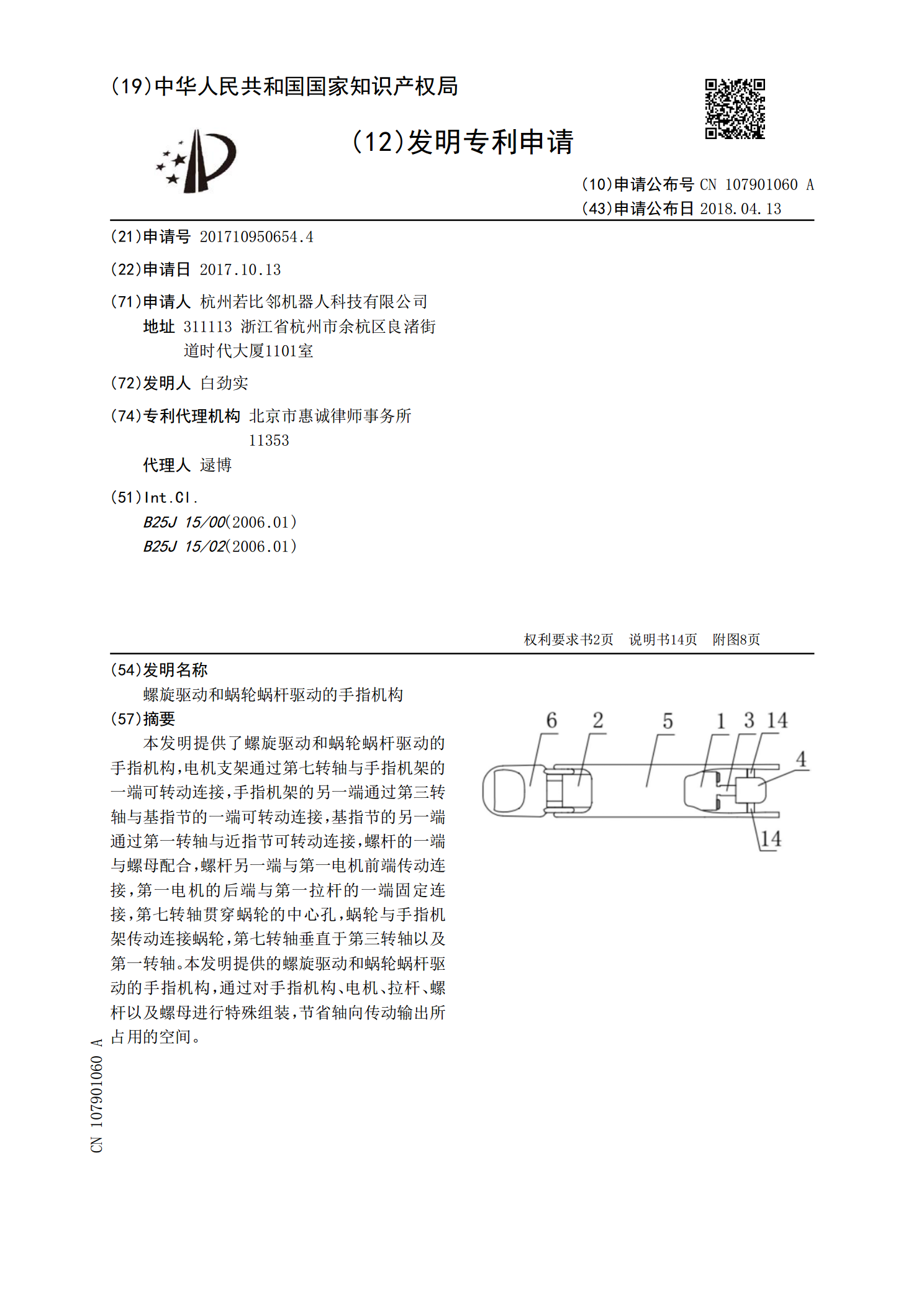
本发明提供了螺旋驱动和蜗轮蜗杆驱动的手指机构,电机支架通过第七转轴与手指机架的一端可转动连接,手指机架的另一端通过第三转轴与基指节的一端可转动连接,基指节的另一端通过第一转轴与近指节可转动连接,螺杆的一端与螺母配合,螺杆另一端与第一电机前端传动连接,第一电机的后端与第一拉杆的一端固定连接,第七转轴贯穿蜗轮的中心孔,蜗轮与手指机架传动连接蜗轮,第七转轴垂直于第三转轴以及第一转轴。本发明提供的螺旋驱动和蜗轮蜗杆驱动的手指机构,通过对手指机构、电机、拉杆、螺杆以及螺母进行特殊组装,节省轴向传动输出所占用的空间。