
螺旋驱动和蜗轮蜗杆驱动的手指机构.pdf

努力****亚捷

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共33页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
螺旋驱动和蜗轮蜗杆驱动的手指机构.pdf
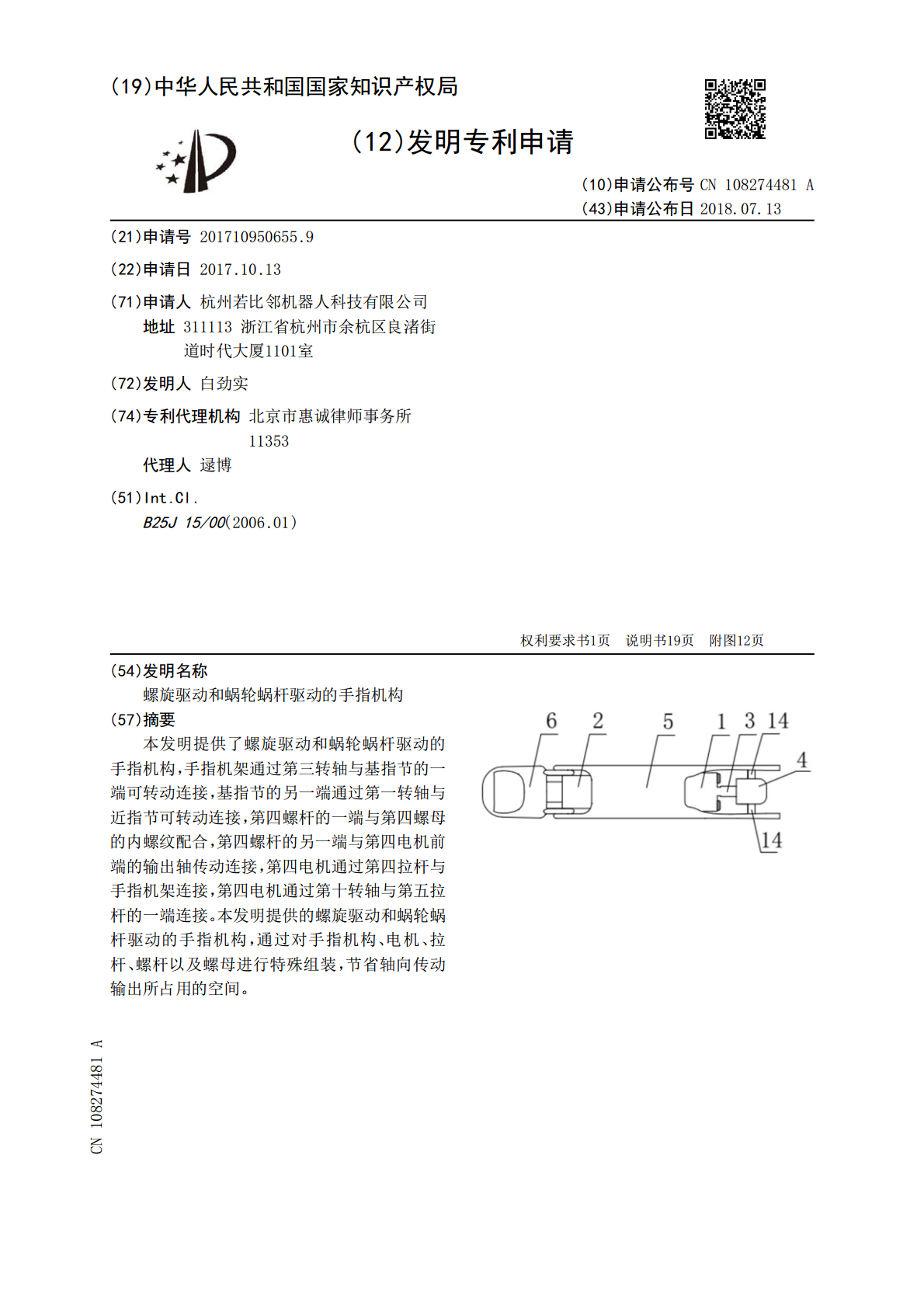
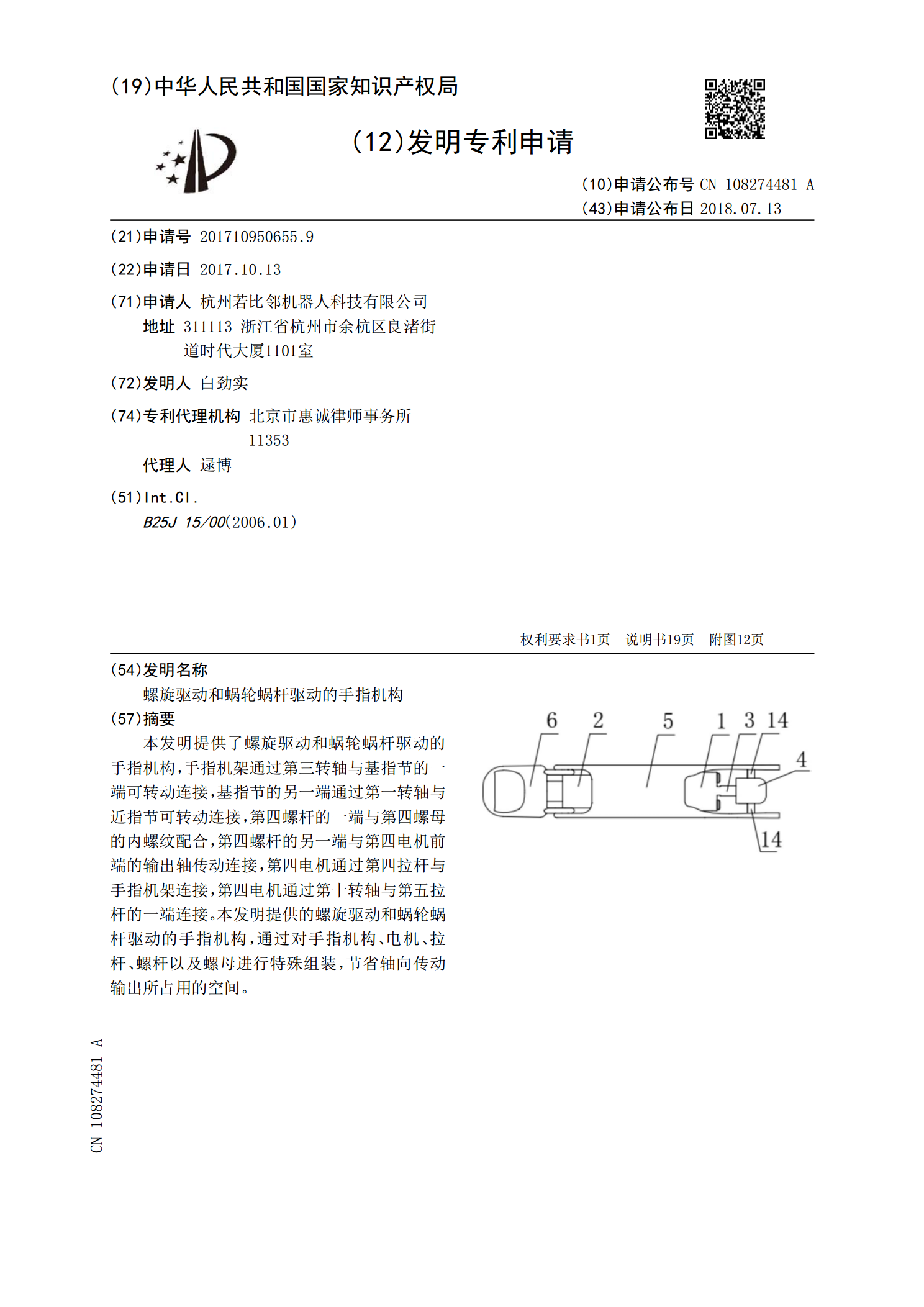
本发明提供了螺旋驱动和蜗轮蜗杆驱动的手指机构,手指机架通过第三转轴与基指节的一端可转动连接,基指节的另一端通过第一转轴与近指节可转动连接,第四螺杆的一端与第四螺母的内螺纹配合,第四螺杆的另一端与第四电机前端的输出轴传动连接,第四电机通过第四拉杆与手指机架连接,第四电机通过第十转轴与第五拉杆的一端连接。本发明提供的螺旋驱动和蜗轮蜗杆驱动的手指机构,通过对手指机构、电机、拉杆、螺杆以及螺母进行特殊组装,节省轴向传动输出所占用的空间。
螺旋驱动和蜗轮蜗杆驱动的手指机构.pdf
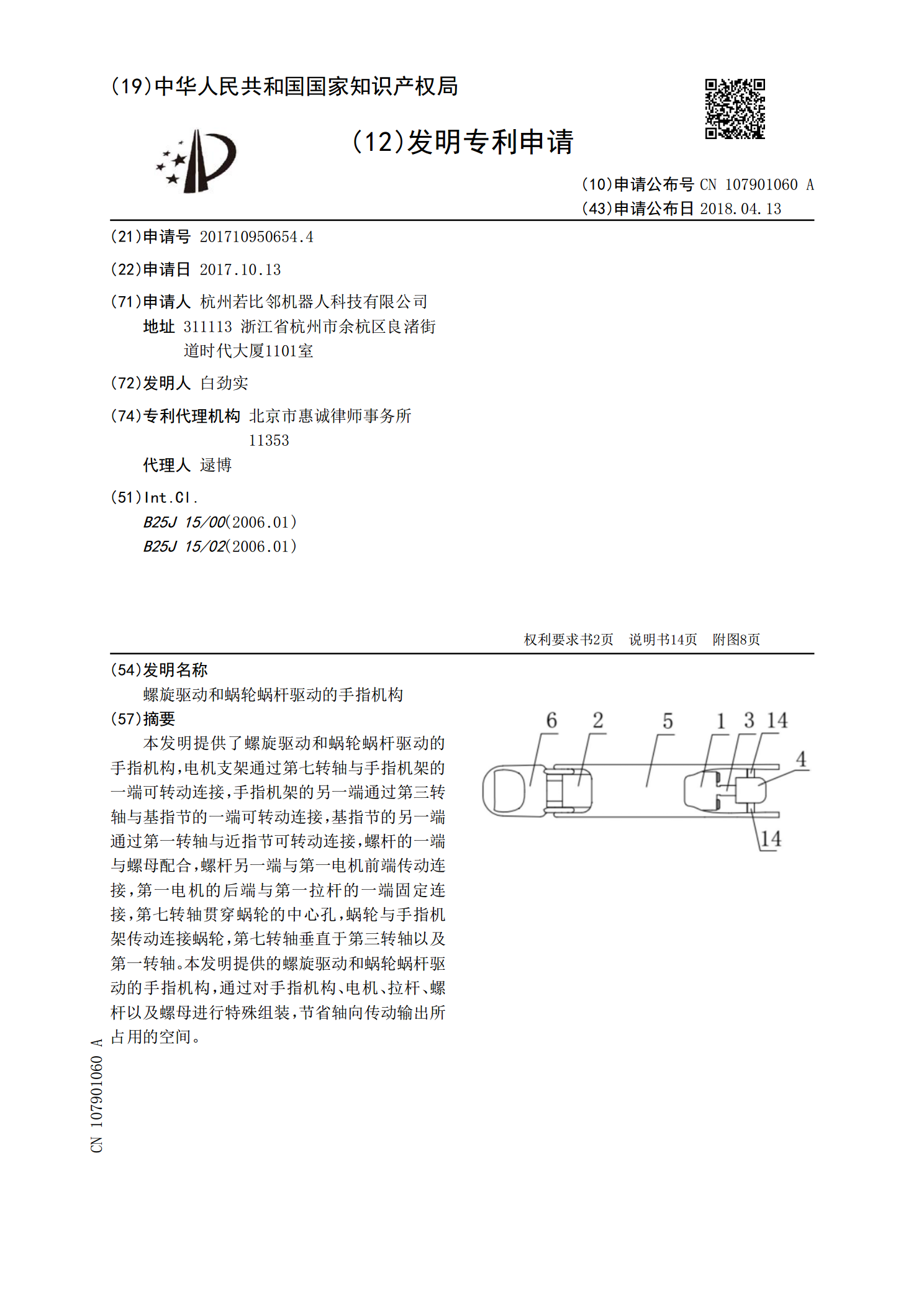
本发明提供了螺旋驱动和蜗轮蜗杆驱动的手指机构,电机支架通过第七转轴与手指机架的一端可转动连接,手指机架的另一端通过第三转轴与基指节的一端可转动连接,基指节的另一端通过第一转轴与近指节可转动连接,螺杆的一端与螺母配合,螺杆另一端与第一电机前端传动连接,第一电机的后端与第一拉杆的一端固定连接,第七转轴贯穿蜗轮的中心孔,蜗轮与手指机架传动连接蜗轮,第七转轴垂直于第三转轴以及第一转轴。本发明提供的螺旋驱动和蜗轮蜗杆驱动的手指机构,通过对手指机构、电机、拉杆、螺杆以及螺母进行特殊组装,节省轴向传动输出所占用的空间。

蜗轮蜗杆驱动的手指机构.pdf
本发明提供了蜗轮蜗杆驱动的手指机构,电机支架设置在机械手手掌中,电机支架通过第七转轴与手指机架的一端可转动连接,手指机架的另一端设置有手指本体,第七转轴垂直于手指本体的关节转轴,第二电机固定在电机支架内,并通过第二电机的输出轴与蜗杆的一端传动连接,蜗杆的另一端与蜗轮配合,当蜗杆转动时,带动蜗轮转动,蜗轮与手指机架传动连接。本发明提供的蜗轮蜗杆驱动的手指机构,通过对手指机构、电机、拉杆、螺杆以及螺母进行特殊组装,节省轴向传动输出所占用的空间。

蜗轮蜗杆驱动装置.pdf
本发明公开了一种蜗轮蜗杆驱动装置,包括蜗轮箱箱体、可旋转地固定设置在蜗轮箱箱体内的蜗杆,与所述的蜗杆传动连接并与阀门阀杆固定连接的蜗轮,所述的蜗杆两端延伸出蜗轮箱箱体之外,其中所述的蜗杆一端为动力输入端,与输入端相对的另一端设置有限位机构。本发明的驱动装置一级设计成蜗轮蜗杆,二级设计成二组直齿轮,来实现二级传动。这样的设计主要是综合蜗轮蜗杆和直齿轮二者的优点,既能提高整体的传动效率又能实现蜗动头在任意角度的自锁,同时在蜗杆的左端延伸出一段细牙螺纹,通过一个行程螺母进行蜗动头角度的调节。
蜗轮蜗杆驱动铣削加工装夹工机构.pdf
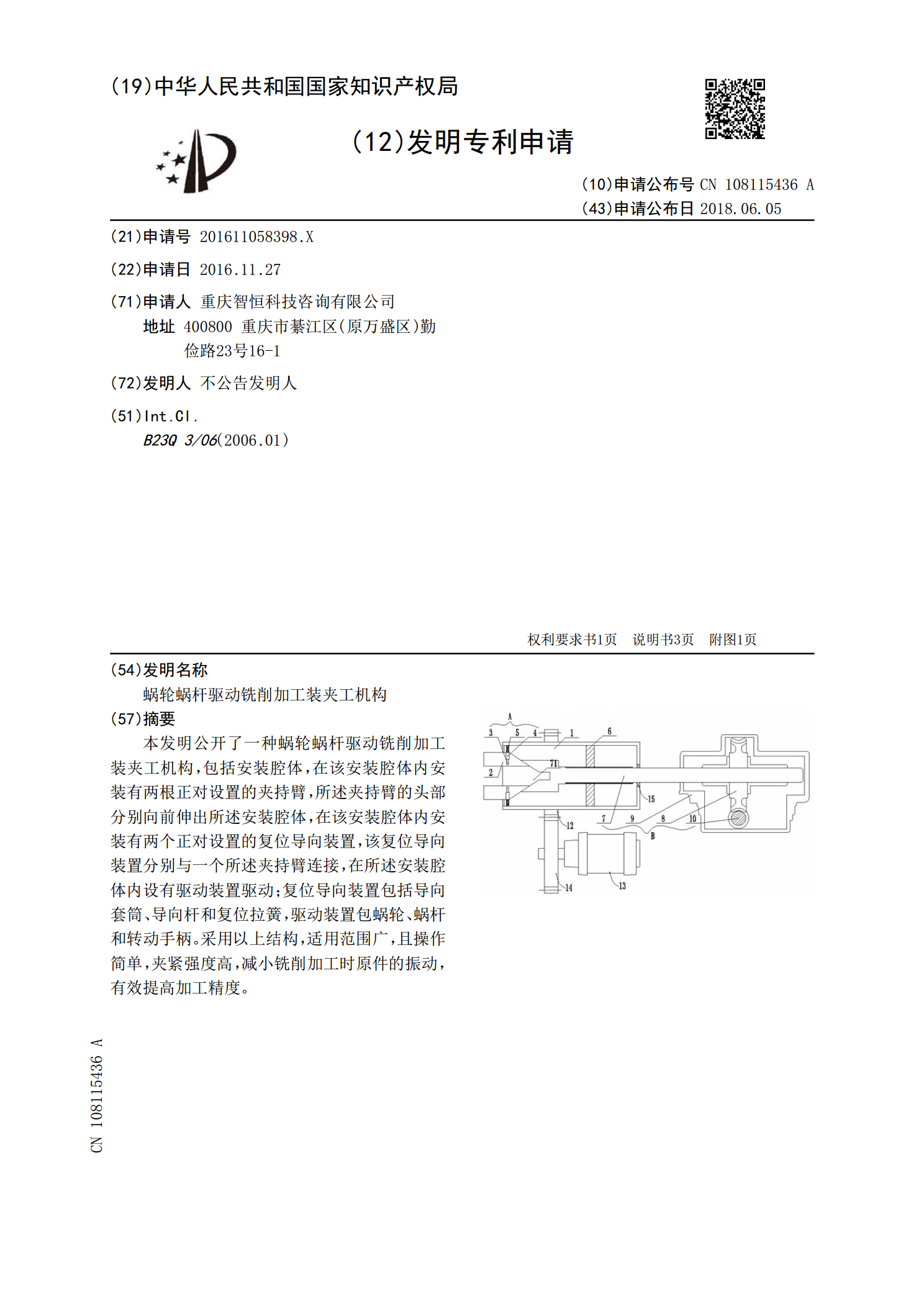
本发明公开了一种蜗轮蜗杆驱动铣削加工装夹工机构,包括安装腔体,在该安装腔体内安装有两根正对设置的夹持臂,所述夹持臂的头部分别向前伸出所述安装腔体,在该安装腔体内安装有两个正对设置的复位导向装置,该复位导向装置分别与一个所述夹持臂连接,在所述安装腔体内设有驱动装置驱动;复位导向装置包括导向套筒、导向杆和复位拉簧,驱动装置包蜗轮、蜗杆和转动手柄。采用以上结构,适用范围广,且操作简单,夹紧强度高,减小铣削加工时原件的振动,有效提高加工精度。