
用于移除和安装车辆的车轮轮胎的机器.pdf

一只****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于移除和安装车辆的车轮轮胎的机器.pdf
一种用于移除和安装车辆的车轮轮胎的机器(1),包括:支承结构(2);夹持设备(5),用于车辆的车轮(R)的轮圈(C),与支承结构(2)相联并且围绕第一转动轴线(X1)可转动;工具携带臂(6),与支承结构(2)可活动地相联并且具有将轮胎(P)从轮圈(C)移除/安装到轮圈(C)的移除/安装工具(7);辅助臂(8),具有胎圈施压工具(9,10),所述胎圈施压工具能够便于将轮胎(P)从轮圈(C)移除/安装到轮圈(C)上的移除/安装操作,其中辅助臂(8)与相对于由夹持设备(5)所限定的轮圈(C)的搁置平面布置在上方

用于移除和安装车辆的车轮轮胎的操作头.pdf
一种用于移除和安装车辆的车轮轮胎的操作头(1),包括用于安装和/或移除轮胎的工具(8),所述工具(8)可以与轮胎更换机(2)的工具携带臂(7)相联并且具有抵接部(9),所述抵接部(9)可以与固定在所述轮胎更换机(2)上的车轮(R)的轮圈(C)的边缘(B)的一段相对应地定位,测力装置(11)与所述工具(8)连结在一起并且具有接触部(12),所述接触部(12)布置成基本与所述抵接部(9)相对应并且能够放置成与轮圈(C)的边缘(B)相接触以沿着至少一个检测方向检测施加在所述边缘(B)上的力。
用于安装和拆卸车辆的车轮轮胎的机器.pdf
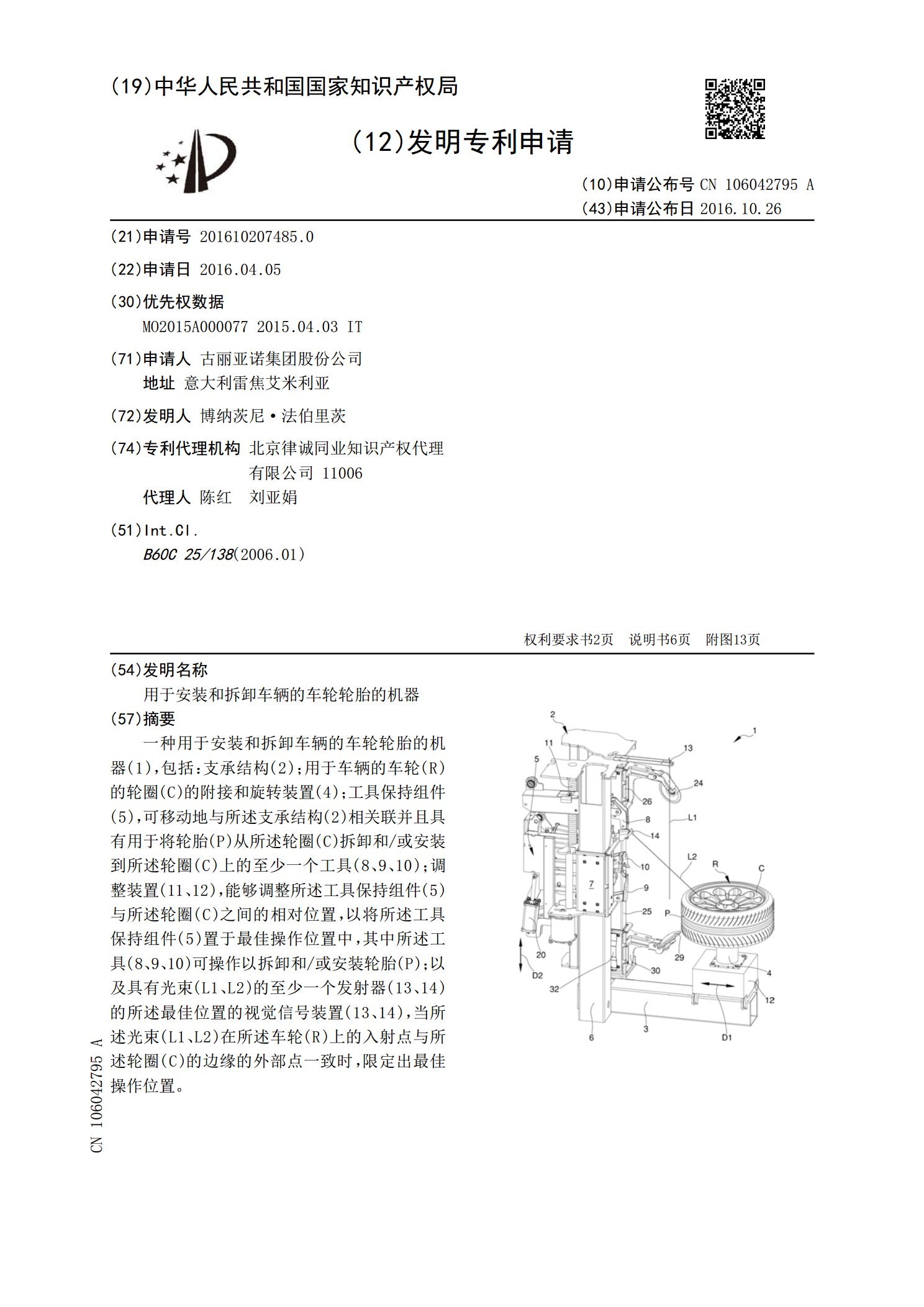
一种用于安装和拆卸车辆的车轮轮胎的机器(1),包括:支承结构(2);用于车辆的车轮(R)的轮圈(C)的附接和旋转装置(4);工具保持组件(5),可移动地与所述支承结构(2)相关联并且具有用于将轮胎(P)从所述轮圈(C)拆卸和/或安装到所述轮圈(C)上的至少一个工具(8、9、10);调整装置(11、12),能够调整所述工具保持组件(5)与所述轮圈(C)之间的相对位置,以将所述工具保持组件(5)置于最佳操作位置中,其中所述工具(8、9、10)可操作以拆卸和/或安装轮胎(P);以及具有光束(L1、L2)的至少一
用于装配和移除轮胎的机器和用于操作机器的方法.pdf
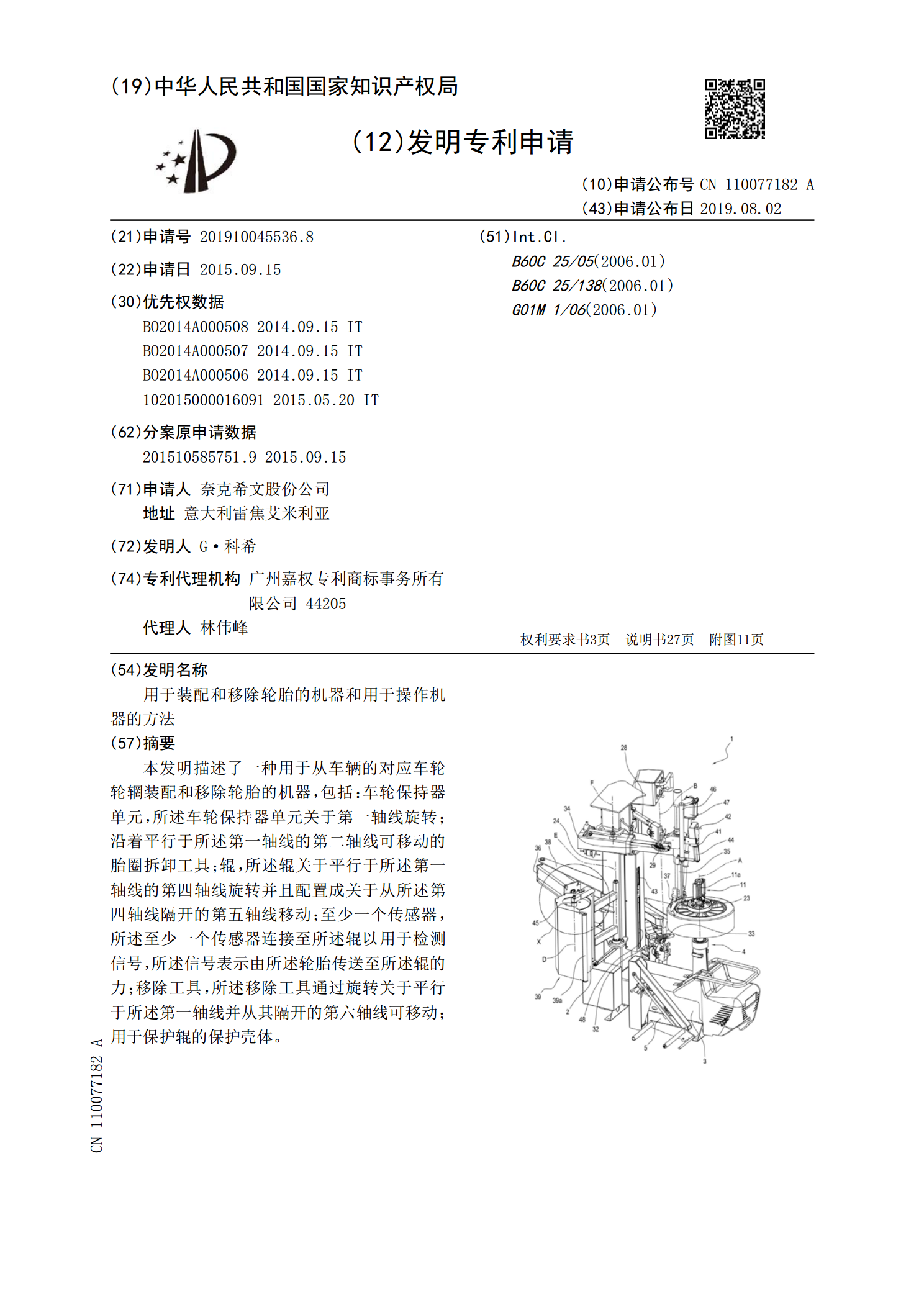
本发明描述了一种用于从车辆的对应车轮轮辋装配和移除轮胎的机器,包括:车轮保持器单元,所述车轮保持器单元关于第一轴线旋转;沿着平行于所述第一轴线的第二轴线可移动的胎圈拆卸工具;辊,所述辊关于平行于所述第一轴线的第四轴线旋转并且配置成关于从所述第四轴线隔开的第五轴线移动;至少一个传感器,所述至少一个传感器连接至所述辊以用于检测信号,所述信号表示由所述轮胎传送至所述辊的力;移除工具,所述移除工具通过旋转关于平行于所述第一轴线并从其隔开的第六轴线可移动;用于保护辊的保护壳体。

用于装配和移除轮胎的机器和方法.pdf
本发明描述了一种用于从车辆的车轮(4)的对应轮缘(3)装配和移除轮胎(2)的机器(1),所述机器(1)包括车轮保持器单元(6),所述车轮保持器单元(6)绕第一旋转垂直轴线(A)旋转;柱体(8),所述柱体(8)具有可滑动地联接上臂(15)和下臂(23)的导轨(10);上操作头部(16),所述上操作头部(16)连接至所述上臂(15),所述上臂(15)绕其旋转轴线旋转并且设置有具有沿着纵向方向的细长形状的至少一个上装配工具(18),所述上装配工具(18)在其操作性地插入所述轮胎(2)的胎圈和所述轮缘(3)的环形