
结合脑——机接口技术的智能轮椅系统的研制的中期报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

结合脑——机接口技术的智能轮椅系统的研制的中期报告.docx
结合脑——机接口技术的智能轮椅系统的研制的中期报告本报告旨在总结智能轮椅系统的研制进展,并讨论中期工作的成果和挑战。本智能轮椅系统采用了脑-机接口技术,使用户可以通过思维控制轮椅的移动和旋转,从而提高了轮椅的控制效率和用户的便利性。系统设计本智能轮椅系统的设计包括四个部分:脑-机接口,控制系统,通信系统和轮椅座椅部分。脑-机接口采用了非侵入式电极,从用户头部采集信号。这些信号经过预处理后,通过无线通信传输到控制系统,控制系统再向轮椅的电机发送指令,从而使轮椅移动或旋转。通信系统采用了蓝牙通信技术,使系统具

结合脑——机接口技术的智能轮椅系统的研制的任务书.docx
结合脑——机接口技术的智能轮椅系统的研制的任务书任务书一、项目背景近年来,随着人口老龄化的不断加剧,以及残疾人口的增加,对于便利性、安全性高的轮椅需求也越来越迫切。为此,本项目针对残障人士或者运动能力有限的老人等用户,推出了一款全新的、基于脑机接口技术的智能轮椅。二、项目内容本项目的核心部分是智能轮椅的设计、制造、测试和实现。其主要功能是通过脑机接口技术,实现人脑与机器之间的无线控制,辅助轮椅的自动转向、停止、移动等操作。智能轮椅还将搭载多种传感器,包括摄像头和声音传感器等,方便用户使用轮椅的同时获取周围
基于多模态脑机接口的智能轮椅.pdf
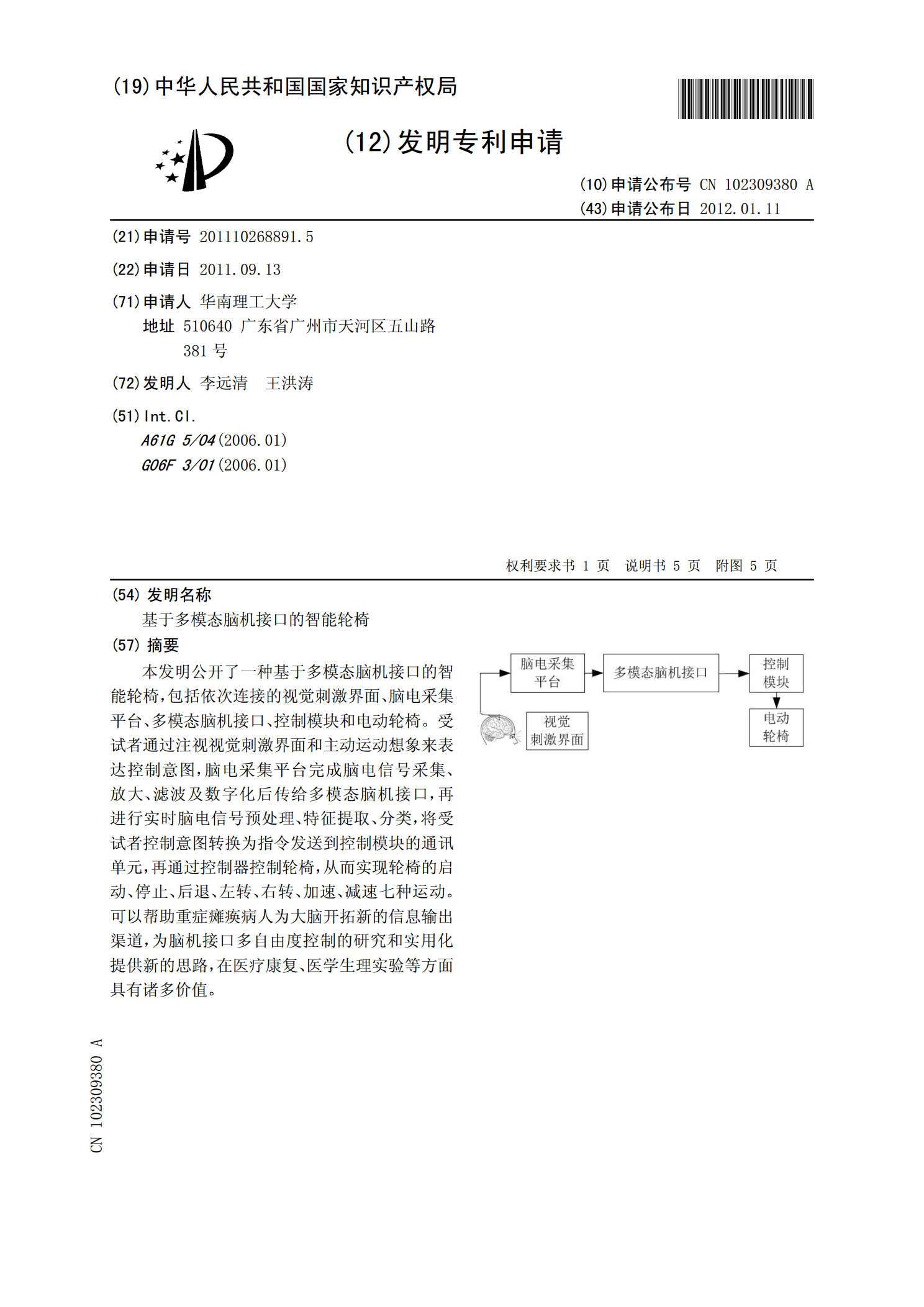
本发明公开了一种基于多模态脑机接口的智能轮椅,包括依次连接的视觉刺激界面、脑电采集平台、多模态脑机接口、控制模块和电动轮椅。受试者通过注视视觉刺激界面和主动运动想象来表达控制意图,脑电采集平台完成脑电信号采集、放大、滤波及数字化后传给多模态脑机接口,再进行实时脑电信号预处理、特征提取、分类,将受试者控制意图转换为指令发送到控制模块的通讯单元,再通过控制器控制轮椅,从而实现轮椅的启动、停止、后退、左转、右转、加速、减速七种运动。可以帮助重症瘫痪病人为大脑开拓新的信息输出渠道,为脑机接口多自由度控制的研究和实

基于单通道脑机接口的嵌入式智能轮椅控制系统研究的中期报告.docx
基于单通道脑机接口的嵌入式智能轮椅控制系统研究的中期报告本文旨在介绍基于单通道脑机接口的嵌入式智能轮椅控制系统研究的中期报告。该研究旨在设计和实现一种能够通过脑信号控制轮椅移动的系统,从而为残疾人士提供更加方便和自主的移动方式。本报告将分为以下几个部分进行介绍。一、研究背景和意义随着社会经济和科技的不断发展,人们对于残疾人士的生存条件和生活质量提出了更高的要求。目前,市场上已经存在一些可以通过脑机接口控制的智能轮椅,但是大多数需要使用多通道脑电信号进行控制,这对于技术和成本都提出了较高的要求。因此,研究一

基于稳态视觉诱发电位脑机接口的智能轮椅系统研究.docx
基于稳态视觉诱发电位脑机接口的智能轮椅系统研究摘要:随着人口老龄化和残疾人口数量的增加,智能轮椅系统的研究和发展变得越来越重要。本论文提出了一种基于稳态视觉诱发电位脑机接口的智能轮椅系统,该系统通过检测和分析大脑的稳态视觉诱发电位,实现了对轮椅的控制。通过对该系统的设计和实验验证,结果表明此系统具有较高的准确性和可靠性,可以为残疾人提供更加安全和方便的移动方式。第一部分:引言背景介绍:人口老龄化和残疾人口数量增长导致了对智能轮椅系统的需求不断增加。研究目的:设计一种基于稳态视觉诱发电位脑机接口的智能轮椅系