
夹持式陶粒砌块码垛机的设计与研究的中期报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

夹持式陶粒砌块码垛机的设计与研究的中期报告.docx
夹持式陶粒砌块码垛机的设计与研究的中期报告设计背景:夹持式陶粒砌块码垛机是一种用于自动化生产线上,对生产出来的陶粒砌块进行码垛的机器人设备。其主要特点是通过夹持夹爪,将陶粒砌块从生产线上取出来,并按照规定的码垛方式进行堆叠,以便于后续的运输和储存。设计目标:本次设计的目标是研究夹持式陶粒砌块码垛机的整体设计方案和控制系统设计,实现对陶粒砌块的自动化码垛,提高生产效率和降低人力成本。设计方案:夹持式陶粒砌块码垛机由以下部分组成:1.夹持机构部分:采用气动夹爪作为夹持装置,通过气动控制完成夹取和释放操作。2.
陶粒砌块自动码垛机的设计及研究.pptx
汇报人:CONTENTS添加章节标题研究背景陶粒砌块的应用和发展自动码垛技术的发展现状研究目的和意义陶粒砌块自动码垛机设计总体设计机械结构设计控制系统设计安全防护设计自动码垛机关键技术实现识别技术定位技术运动控制技术通信技术实验与测试实验设备与环境测试方案与过程测试结果与分析结果对比与讨论结论与展望研究成果总结创新点与贡献未来研究方向与展望汇报人:
新型夹持式码垛机.pdf
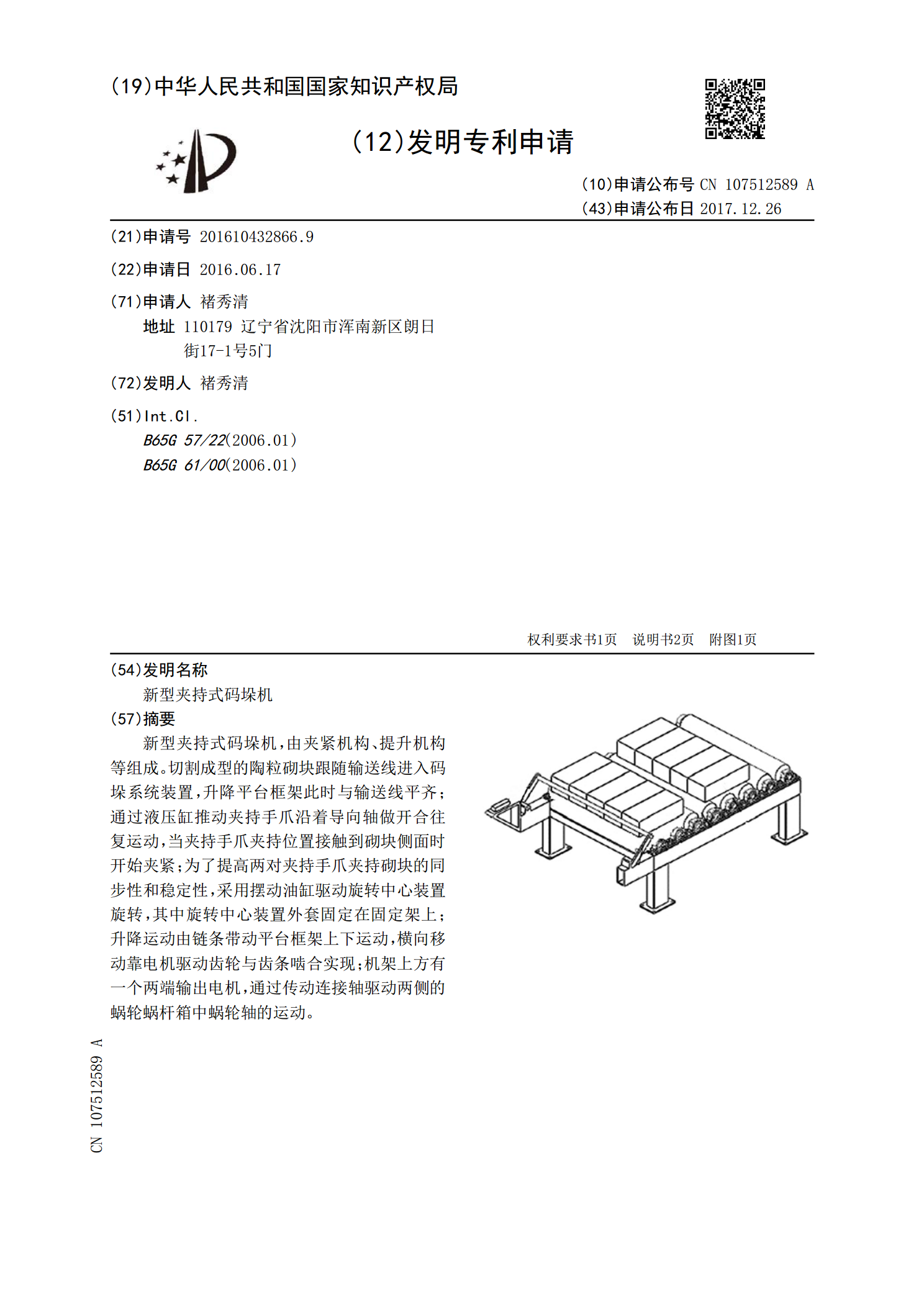
新型夹持式码垛机,由夹紧机构、提升机构等组成。切割成型的陶粒砌块跟随输送线进入码垛系统装置,升降平台框架此时与输送线平齐;通过液压缸推动夹持手爪沿着导向轴做开合往复运动,当夹持手爪夹持位置接触到砌块侧面时开始夹紧;为了提高两对夹持手爪夹持砌块的同步性和稳定性,采用摆动油缸驱动旋转中心装置旋转,其中旋转中心装置外套固定在固定架上;升降运动由链条带动平台框架上下运动,横向移动靠电机驱动齿轮与齿条啮合实现;机架上方有一个两端输出电机,通过传动连接轴驱动两侧的蜗轮蜗杆箱中蜗轮轴的运动。

气动膜片式码垛机夹持装置的设计与分析的中期报告.docx
气动膜片式码垛机夹持装置的设计与分析的中期报告一、项目背景与意义随着工业化程度的提高和自动化水平的不断提升,自动化设备在生产生活中得到了广泛应用。码垛机作为一种自动化装备,在生产生活中发挥着重要的作用。气动膜片式码垛机是目前市场上使用较多的一种码垛机,其优点在于运行稳定、操作简便、自动化程度高。然而,气动膜片式码垛机中夹持装置的设计和优化仍然存在着一些问题。夹持装置作为整个设备的关键部件之一,其质量和性能会直接影响到整个设备的稳定性和生产效率。因此,对于气动膜片式码垛机夹持装置的设计与分析研究具有重要的意

码垛机的夹持装置.pdf
本发明公开了一种码垛机的夹持装置,包括:位于输送机构两侧的一对夹持机器人,每个夹持机器人的工作臂上均安装有夹手机构,每个夹手机构包括:设置有滑轨的安装座,一对夹持臂分别通过滑块与滑轨滑动连接,安装座底部的同步带轮上设置有同步带,一对夹持臂上的两块皮带夹板分别固定连接在同步带上不同的输送侧,该对夹持臂之间还设置有一个气缸,该气缸的缸体安装在安装座的底部,气缸的活塞杆与其中一个夹持臂相连接,气缸能驱动一对夹持臂相互靠拢或向外远离,从而驱动一对夹持板夹紧货物或松开货物。本发明的优点在于:每次夹紧的货物都位于一对