
机械手自动抓取钢卷系统的研究的任务书.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

机械手自动抓取钢卷系统的研究的任务书.docx
机械手自动抓取钢卷系统的研究的任务书任务名称:机械手自动抓取钢卷系统的研究任务背景:随着钢铁工业的发展,钢卷生产成为重要的生产方式。然而,在钢卷生产线上,由于钢卷体积大、重量大、形状不规则等特点,传统的人工抓取方式存在一系列的问题,如效率低、劳动强度大、作业安全性低等。因此,研究一种机械手自动抓取钢卷的系统,能够提高生产效率,降低劳动强度,提高作业安全性。任务目标:本任务的主要目标是设计和研究一种机械手自动抓取钢卷的系统,该系统能够实现自动抓取、定位、转移和放置等功能。具体的任务目标包括:1.设计一种适用

机械手自动抓取钢卷系统的研究的综述报告.docx
机械手自动抓取钢卷系统的研究的综述报告机械手自动抓取钢卷系统是一种通常应用于钢铁制造业的自动化工艺装备。其主要功能是自动从一个生产线上或者货架上快速准确抓取钢卷进行输送、存储、装卸等操作。本文将对机械手自动抓取钢卷系统的研究现状进行综述。机械手自动抓取钢卷系统的研究应用已经相当广泛,它可以替代人工操作,完成从钢卷装载到卸载的一系列操作,大大提高了生产效率。在钢铁制造业中,钢卷是重要的生产资料之一,传统上是通过人工叉车进行物料的运输、装卸和存储。由于现代钢卷生产线的自动化水平不断提高,机械手自动抓取钢卷系统
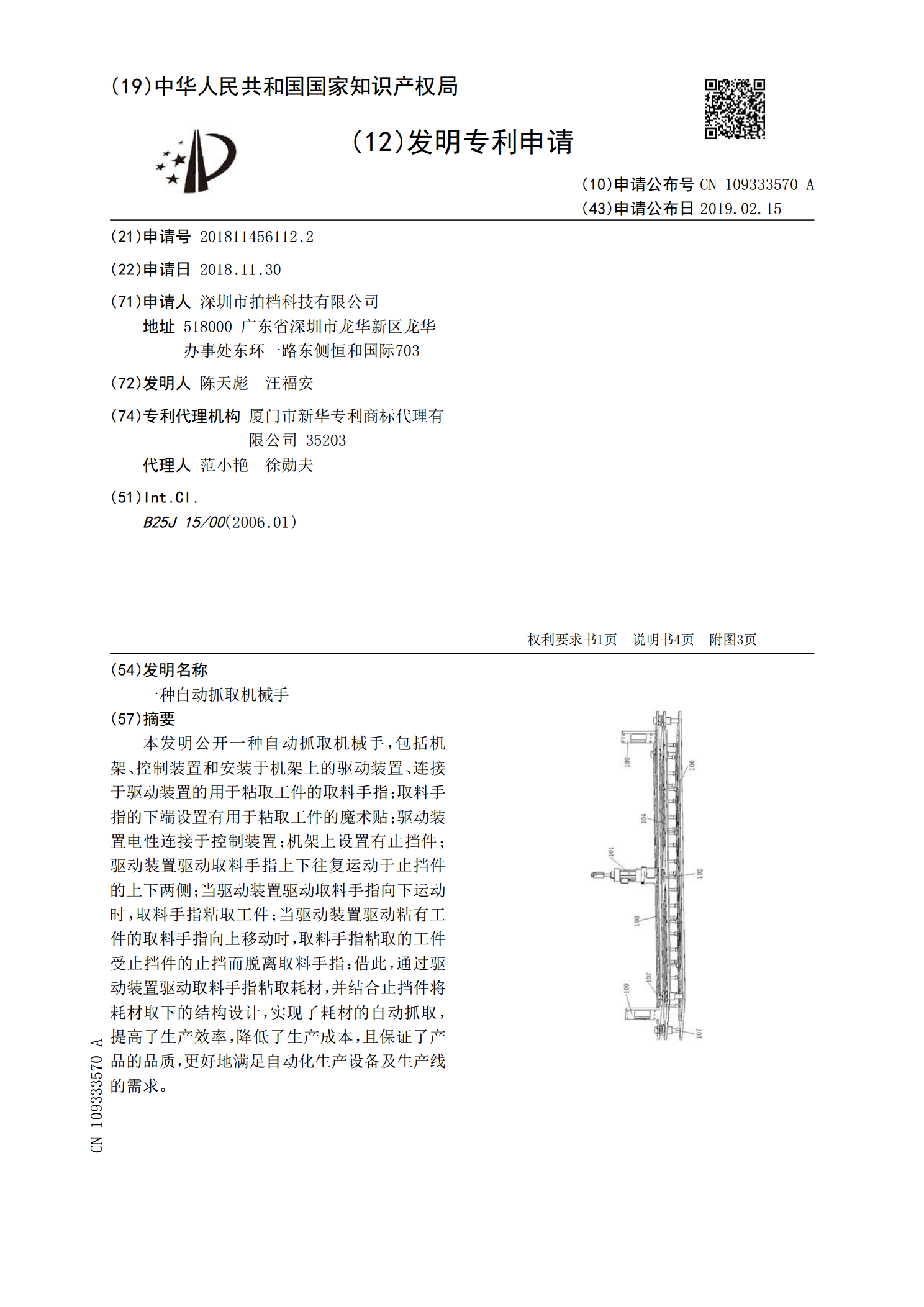
一种自动抓取机械手.pdf
本发明公开一种自动抓取机械手,包括机架、控制装置和安装于机架上的驱动装置、连接于驱动装置的用于粘取工件的取料手指;取料手指的下端设置有用于粘取工件的魔术贴;驱动装置电性连接于控制装置;机架上设置有止挡件;驱动装置驱动取料手指上下往复运动于止挡件的上下两侧;当驱动装置驱动取料手指向下运动时,取料手指粘取工件;当驱动装置驱动粘有工件的取料手指向上移动时,取料手指粘取的工件受止挡件的止挡而脱离取料手指;借此,通过驱动装置驱动取料手指粘取耗材,并结合止挡件将耗材取下的结构设计,实现了耗材的自动抓取,提高了生产效率

多孔板抓取机械手的研究与开发的任务书.docx
多孔板抓取机械手的研究与开发的任务书任务书一、任务背景现代生产制造中,自动化技术的推广和应用得到了广泛的关注和重视。机械手是其中的一项重要应用技术,它能够完成繁琐、重复、危险的工业操作,提高工作效率和生产质量,同时也能减少人力资源的浪费,并为企业创造更高的经济效益。多孔板抓取机械手是一种常见的机械手类型,可以进行多种物体的抓取任务。但是现有的多孔板抓取机械手的稳定性和效果还有待提高。因此,为了能够更好地满足人们对自动化制造的需求,提高机械手的使用价值,本项目拟研发一种高效、稳定的多孔板抓取机械手。二、任务
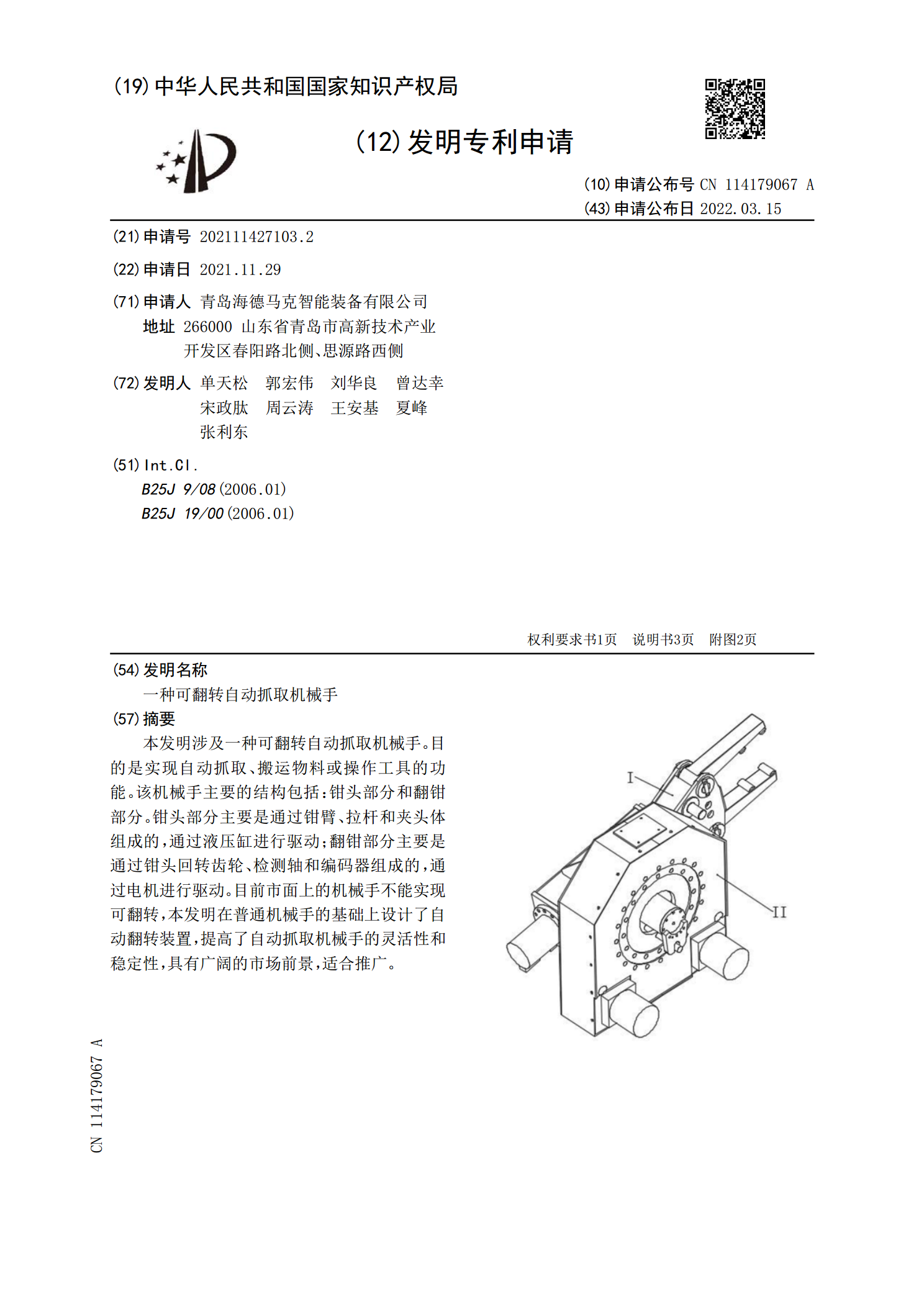
一种可翻转自动抓取机械手.pdf
本发明涉及一种可翻转自动抓取机械手。目的是实现自动抓取、搬运物料或操作工具的功能。该机械手主要的结构包括:钳头部分和翻钳部分。钳头部分主要是通过钳臂、拉杆和夹头体组成的,通过液压缸进行驱动;翻钳部分主要是通过钳头回转齿轮、检测轴和编码器组成的,通过电机进行驱动。目前市面上的机械手不能实现可翻转,本发明在普通机械手的基础上设计了自动翻转装置,提高了自动抓取机械手的灵活性和稳定性,具有广阔的市场前景,适合推广。