
基于自抗扰控制的机器人关节控制系统的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于自抗扰控制的机器人关节控制系统的开题报告.docx
基于自抗扰控制的机器人关节控制系统的开题报告一、研究背景机器人是近年来快速发展的新兴技术,广泛应用于工业生产、医疗、军事等领域。机器人的关节是机器人的基本组成部分,直接影响机器人的运动能力和精度。其中,机器人关节控制系统是关键的控制部分,对于机器人的精度、稳定性和鲁棒性都有很大的影响。传统的机器人关节控制系统采用PID控制算法,但该算法的控制精度受到机器人关节系统的非线性和非线性参数变化的影响较大,无法满足高精度控制的需求。为了解决这个问题,近年来出现了一种新的控制方法,即自适应控制和自抗扰控制。自抗扰控

基于自抗扰控制的变风量空调控制系统的研究的开题报告.docx
基于自抗扰控制的变风量空调控制系统的研究的开题报告一、选题背景与意义随着科技的不断发展,现代化建筑中空调的普及率越来越高,成为建筑中不可或缺的一部分。为了提高建筑物的能源利用效率和环境舒适性,目前广泛应用的变风量空调系统一直是热门研究领域之一。变风量空调系统不仅可以实现室内温度和湿度的调节,还可以节约能源,降低运行成本。但是,目前变风量空调系统存在的问题是:变风量控制系统设计复杂,容易受干扰,对控制精度要求高,稳定性差。比如在建筑区域有人员进出、设备运行等情况下,会导致室内外环境差异,从而对空调系统运行产

船舶航向自抗扰控制的研究的开题报告.docx
船舶航向自抗扰控制的研究的开题报告一、研究背景随着现代科技的发展,船舶的自动化技术越来越普及,并且在船舶运输、海洋资源勘探、海上救援等领域得到了广泛应用。在航行过程中,船舶需要克服各种外部扰动,如风浪和潮汐等影响其航向稳定性的因素。为了提高航行的安全性、航行效率和舒适性,需要对船舶的航向自抗扰控制进行深入研究。二、研究目的本研究的主要目的是研究船舶航向自抗扰控制的方法和技术,提高其航行稳定性和操纵性,并且增加对外部扰动的免疫能力。通过对现有的控制方案和算法的分析和比较,探索适合不同船型和不同工况的自抗扰控
自抗扰复合振动控制系统.pdf
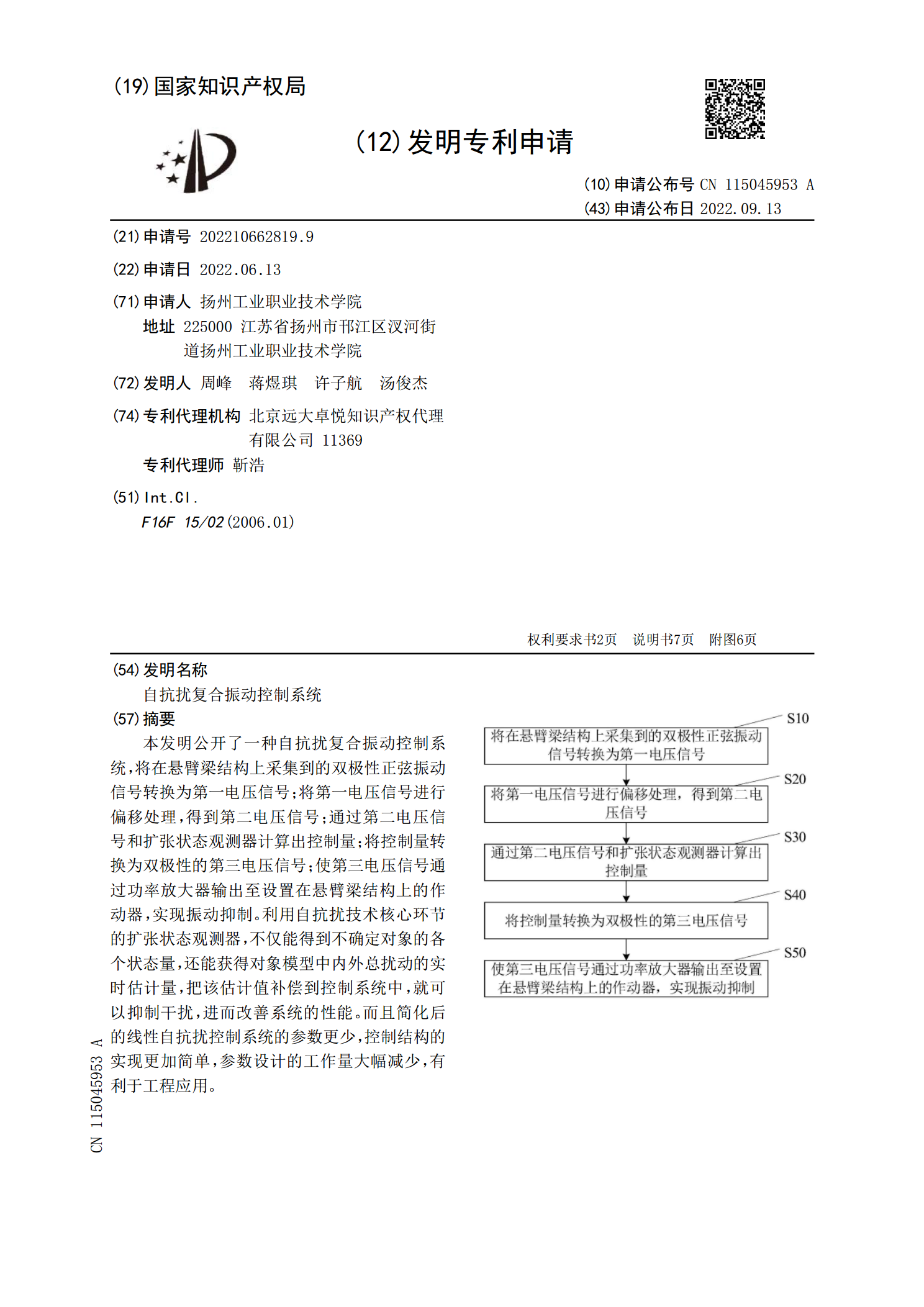
本发明公开了一种自抗扰复合振动控制系统,将在悬臂梁结构上采集到的双极性正弦振动信号转换为第一电压信号;将第一电压信号进行偏移处理,得到第二电压信号;通过第二电压信号和扩张状态观测器计算出控制量;将控制量转换为双极性的第三电压信号;使第三电压信号通过功率放大器输出至设置在悬臂梁结构上的作动器,实现振动抑制。利用自抗扰技术核心环节的扩张状态观测器,不仅能得到不确定对象的各个状态量,还能获得对象模型中内外总扰动的实时估计量,把该估计值补偿到控制系统中,就可以抑制干扰,进而改善系统的性能。而且简化后的线性自抗扰控

基于DSP的光电跟瞄吊舱自抗扰控制技术的开题报告.docx
基于DSP的光电跟瞄吊舱自抗扰控制技术的开题报告一、选题背景和意义光电跟瞄吊舱是一种重要的航空电子设备,可以用于飞机、直升机等飞行器上,为其提供精确的目标跟踪和瞄准功能。然而,在实际操作中,光电跟瞄吊舱往往会受到飞行器飞行时的各种扰动,如风力、姿态变化等影响,导致其精度和稳定性下降,从而影响其跟踪和瞄准效果。为了解决这一问题,自抗扰控制技术成为了光电跟瞄吊舱设计中的重要内容。该技术可以根据吊舱受到的扰动信号,对其进行适时、适量的控制,使吊舱保持稳定和精度,并且能够自我适应和调整,提高吊舱的控制性能和抗干扰