
自抗扰复合振动控制系统.pdf

An****99

1/10

2/10

3/10
4/10

5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自抗扰复合振动控制系统.pdf
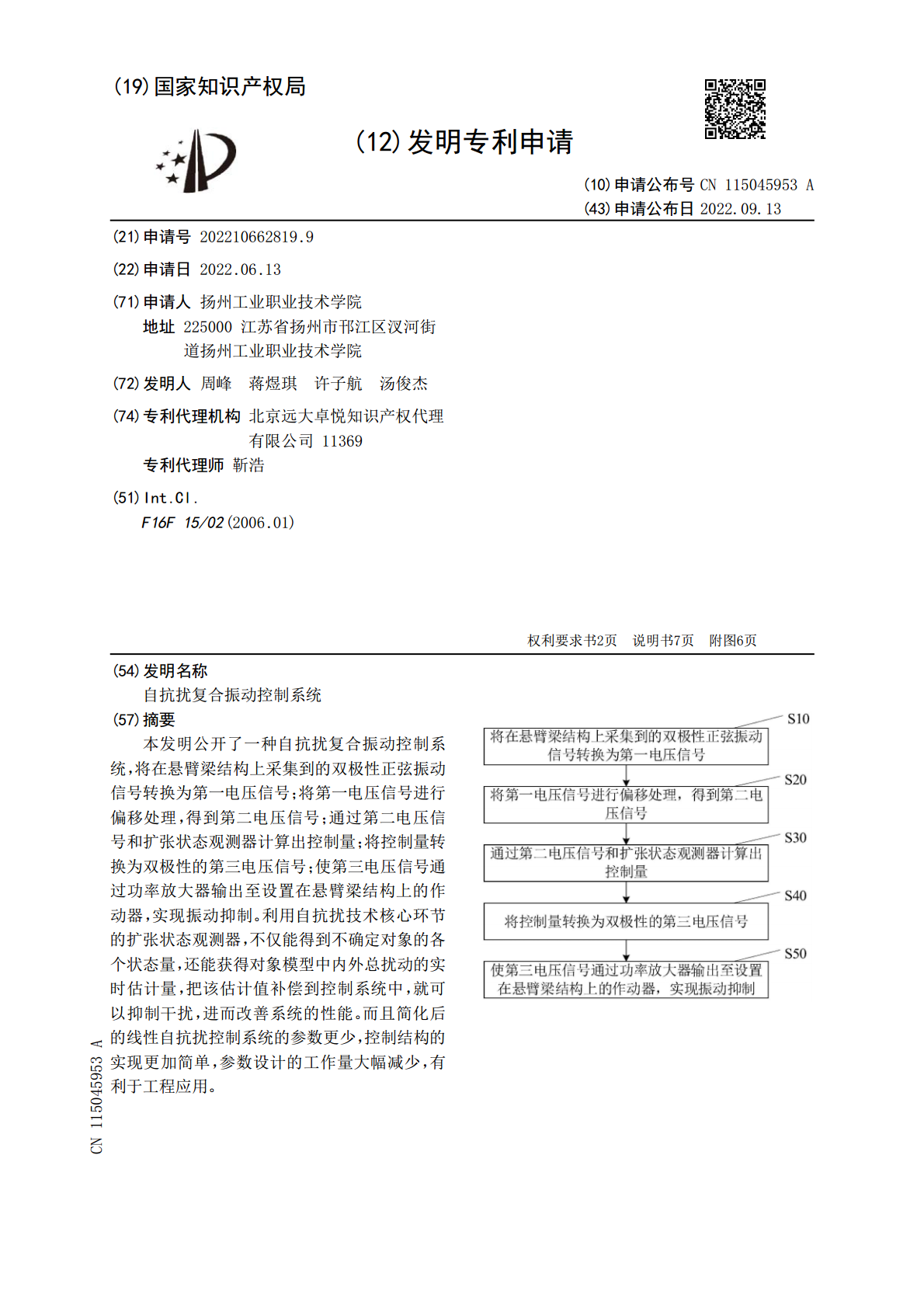
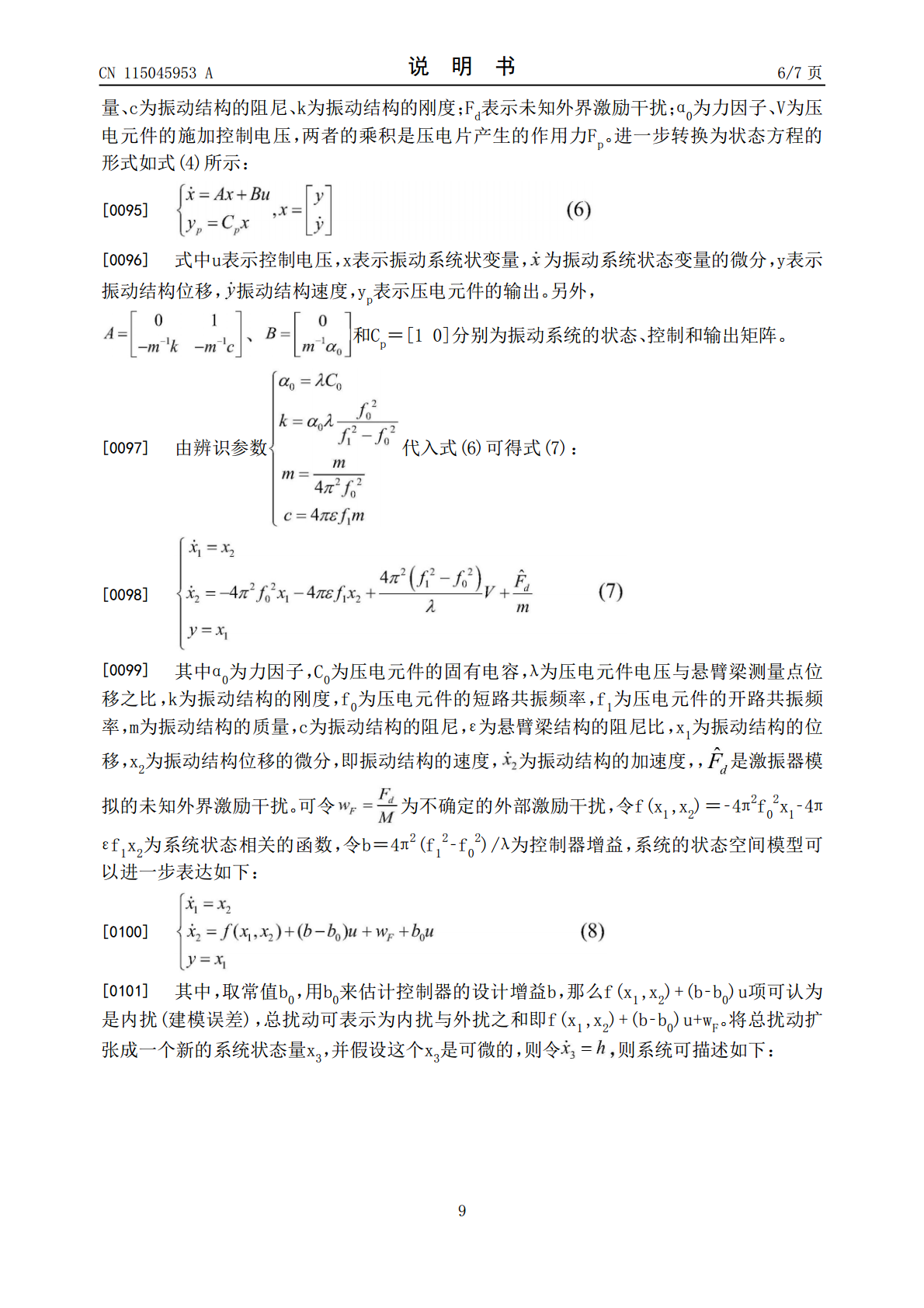
本发明公开了一种自抗扰复合振动控制系统,将在悬臂梁结构上采集到的双极性正弦振动信号转换为第一电压信号;将第一电压信号进行偏移处理,得到第二电压信号;通过第二电压信号和扩张状态观测器计算出控制量;将控制量转换为双极性的第三电压信号;使第三电压信号通过功率放大器输出至设置在悬臂梁结构上的作动器,实现振动抑制。利用自抗扰技术核心环节的扩张状态观测器,不仅能得到不确定对象的各个状态量,还能获得对象模型中内外总扰动的实时估计量,把该估计值补偿到控制系统中,就可以抑制干扰,进而改善系统的性能。而且简化后的线性自抗扰控

智能桁架结构自抗扰振动控制实验研究.docx
智能桁架结构自抗扰振动控制实验研究摘要本文通过对智能桁架结构进行自抗扰振动控制实验研究,从不同角度探讨了智能控制技术在桁架结构中的应用。实验结果表明,智能控制技术在桁架结构中具有广泛的应用前景和巨大的发展潜力。关键词:智能控制技术;桁架结构;自抗扰振动控制;实验研究引言传统的桁架结构在一定的环境下很难达到理想的抗振效果,因而需要在桁架结构设计中引入新的控制方法。自抗扰控制技术是一种先进的控制技术,可以对于系统在外界干扰和非线性因素影响下的运行情况进行有效控制。而智能控制技术,尤其是神经网络模型,可以实时学

基于最优控制自抗扰控制的直气复合控制系统设计研究.docx
基于最优控制自抗扰控制的直气复合控制系统设计研究随着工业自动化技术的发展,自抗扰控制和最优控制已经成为当前控制领域中的热门研究课题之一。本文围绕着如何将两种控制技术融合到直气复合控制系统中,进行设计和研究。一、直气复合控制系统概述直气复合控制系统是一种高精度、高可靠性的控制系统,通常由一个普通控制器和多个空气静力轴承组成。其中的普通控制器负责控制系统的基本运动,而多个空气静力轴承则负责保持轴承运动稳定,提高系统的精度和稳定性。二、最优控制技术介绍最优控制是一种通过数学模型和最优控制策略来优化控制系统性能的

复合非线性自抗扰控制的任务书.docx
复合非线性自抗扰控制的任务书任务背景:复合控制系统中的非线性自抗扰(NonlinearActiveDisturbanceRejection,简称NADRC)控制是一种应用非线性自抗扰控制和经典控制相结合的高级控制算法。NADRC控制可以有效地应对非线性系统、模型误差及外部干扰等问题,具有控制精度高、控制性能优良等优点。此外,NADRC控制方法具有较为广泛的适用范围,可以应用于机电一体化系统、化工过程控制、航空航天等领域。任务要求:本次任务的主要目标为实现复合非线性自抗扰控制方法的应用。具体任务要求如下:1

坦克炮控系统的复合自抗扰控制研究.pptx
,目录PartOnePartTwo复合自抗扰控制技术的原理复合自抗扰控制技术的特点复合自抗扰控制技术的应用范围PartThree坦克炮控系统的组成坦克炮控系统的工作原理坦克炮控系统对控制精度的要求PartFour复合自抗扰控制在坦克炮控系统中的实现方式复合自抗扰控制在坦克炮控系统中的优势复合自抗扰控制在坦克炮控系统中的控制效果PartFive仿真模型的建立仿真实验结果分析仿真结果与实际应用的对比分析PartSix实际应用情况介绍实际应用效果评估实际应用中存在的问题与解决方案PartSeven研究结论研究展