
基于坐姿及多传感融合的智能轮椅控制的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于坐姿及多传感融合的智能轮椅控制的开题报告.docx
基于坐姿及多传感融合的智能轮椅控制的开题报告一、选题背景及研究意义随着我国人口老龄化进程的加速,老年人的数量不断增加,而瘫痪或运动不便的人群也同样在不断增加。对于这些人来说,智能轮椅是他们走向社会、改善生活质量的必备工具之一。智能轮椅主要分为手动和电动两种类型,相对于手动轮椅而言,电动轮椅的使用更加方便快捷。智能轮椅能够帮助残障人士在外出、活动等方面提供更多的自主性,提高其生活自理能力和社交活动。因此,本文拟基于坐姿及多传感融合的智能轮椅控制进行研究,旨在为智能轮椅研发提供技术支持,以帮助残障人群更好地融

基于多传感器信息融合的智能轮椅避障研究的中期报告.docx
基于多传感器信息融合的智能轮椅避障研究的中期报告一、背景介绍随着全球人口老龄化程度的不断加深,图书馆、医院、商场、机场等人群密集的公共场所对轮椅的需求越来越大,而轮椅避障技术的研究对于实现智能化、无障碍化的公共场所至关重要。传统的轮椅避障技术主要依赖于人工控制,但是这种方法需要人为输入控制指令,且无法处理复杂的环境和情况。因此,基于多传感器信息融合的智能轮椅避障技术应运而生。二、现有研究综述1.传感器选择智能轮椅避障技术涉及到多种传感器的选择和使用,比如激光距离传感器、超声波传感器、红外传感器、视觉传感器
一种多传感器信息融合的智能轮椅.pdf
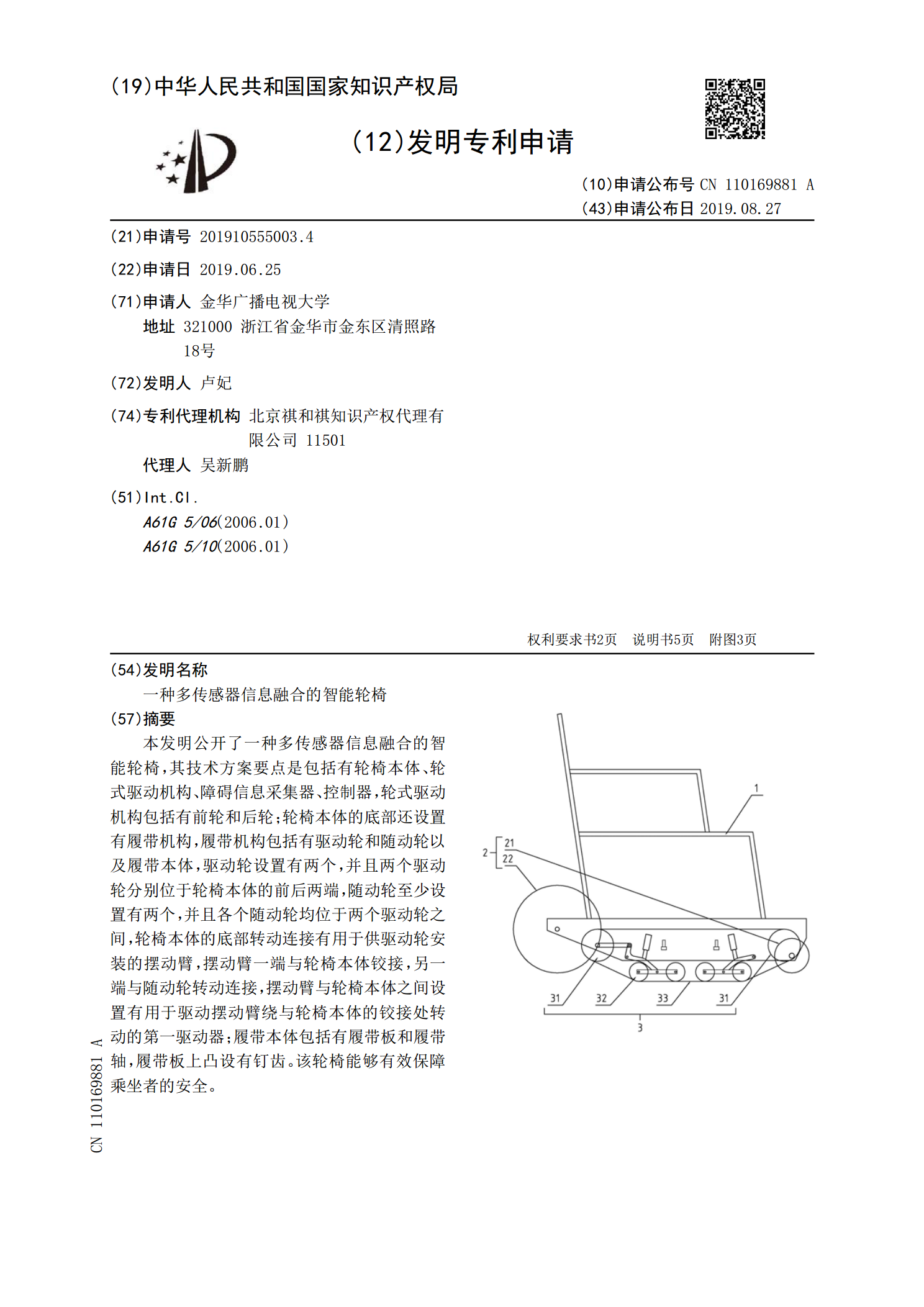
本发明公开了一种多传感器信息融合的智能轮椅,其技术方案要点是包括有轮椅本体、轮式驱动机构、障碍信息采集器、控制器,轮式驱动机构包括有前轮和后轮;轮椅本体的底部还设置有履带机构,履带机构包括有驱动轮和随动轮以及履带本体,驱动轮设置有两个,并且两个驱动轮分别位于轮椅本体的前后两端,随动轮至少设置有两个,并且各个随动轮均位于两个驱动轮之间,轮椅本体的底部转动连接有用于供驱动轮安装的摆动臂,摆动臂一端与轮椅本体铰接,另一端与随动轮转动连接,摆动臂与轮椅本体之间设置有用于驱动摆动臂绕与轮椅本体的铰接处转动的第一驱动

基于多传感器信息融合的管道泄漏智能诊断与定位方法的研究的开题报告.docx
基于多传感器信息融合的管道泄漏智能诊断与定位方法的研究的开题报告一、研究背景随着国家对环保和安全的要求日益提高,对于管道泄漏这种危害环境和人员安全的事件,企业需要能够及时发现、诊断、定位、处理。目前有一些传统的方法,如使用压力变化、声信号和液位等单一传感器来判断管道是否出现泄漏问题,但是这些方法都有着一定的局限性,如无法定位泄漏点、容易受到干扰等。因此,本研究旨在通过多传感器信息融合,实现对管道泄漏的智能诊断与定位。二、研究内容与研究目标本研究的主要内容是基于多个传感器信息融合的管道泄漏智能诊断与定位方法

基于信息融合的智能轮椅导航的中期报告.docx
基于信息融合的智能轮椅导航的中期报告中期报告一、研究背景及意义2020年,随着全球人口老龄化的加剧,使得智能轮椅产业逐渐走向成熟,智能轮椅的功能不断完善,智能化程度日益提高。智能轮椅不仅可以为残疾人或者老年人提供便利,更可以通过信息传输和传感器技术进行数据采集和处理,从而对实现轮椅的自主导航提供了条件。基于此,本文的研究基于信息融合的智能轮椅导航,旨在提高智能轮椅的安全性和导航精度,提高轮椅使用者的生活自理能力,增强智能轮椅的应用价值。二、研究内容和进展本研究的主要内容是基于信息融合的智能轮椅导航。本研究