
一种多传感器信息融合的智能轮椅.pdf

一只****爱敏

1/10

2/10
3/10
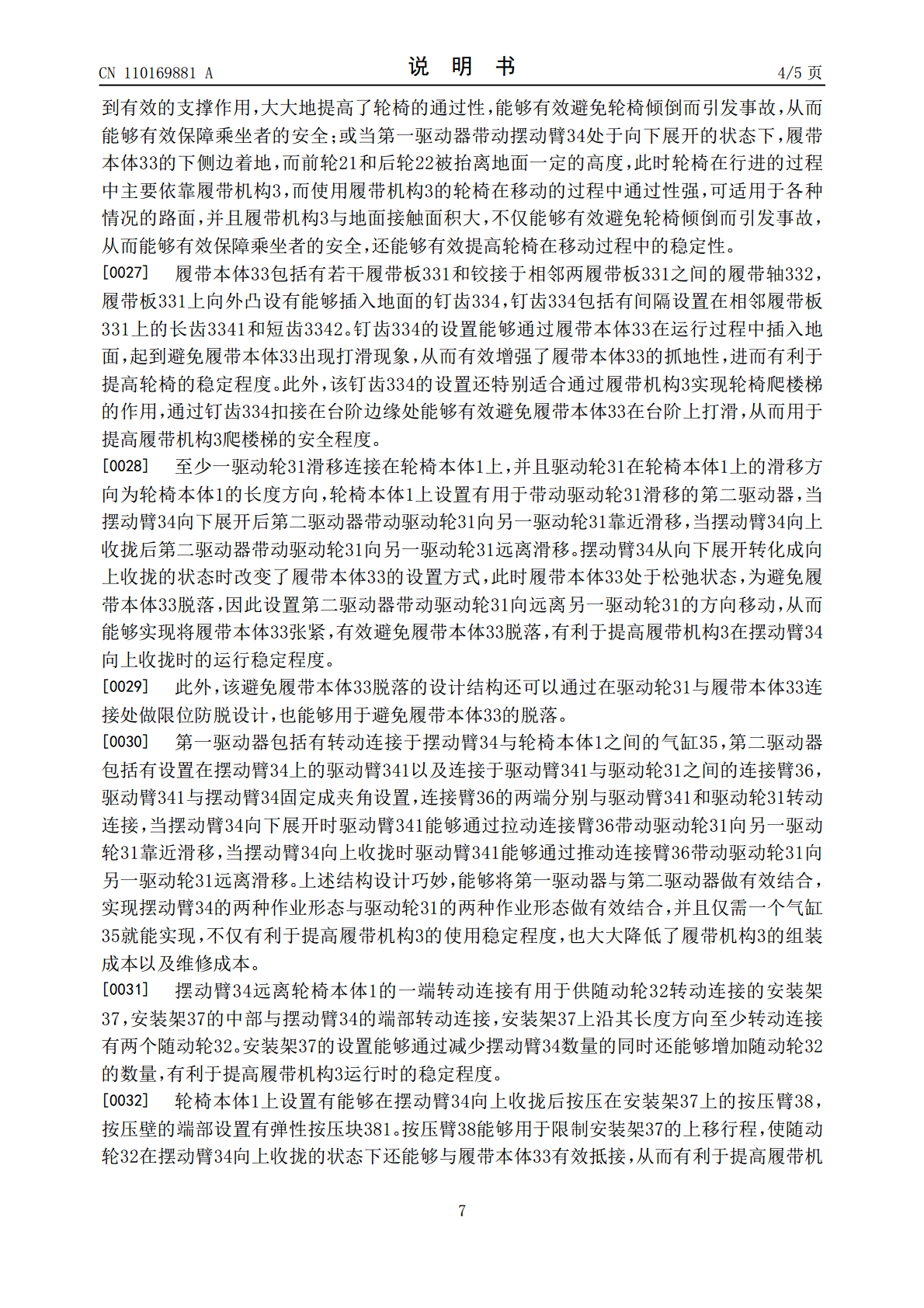
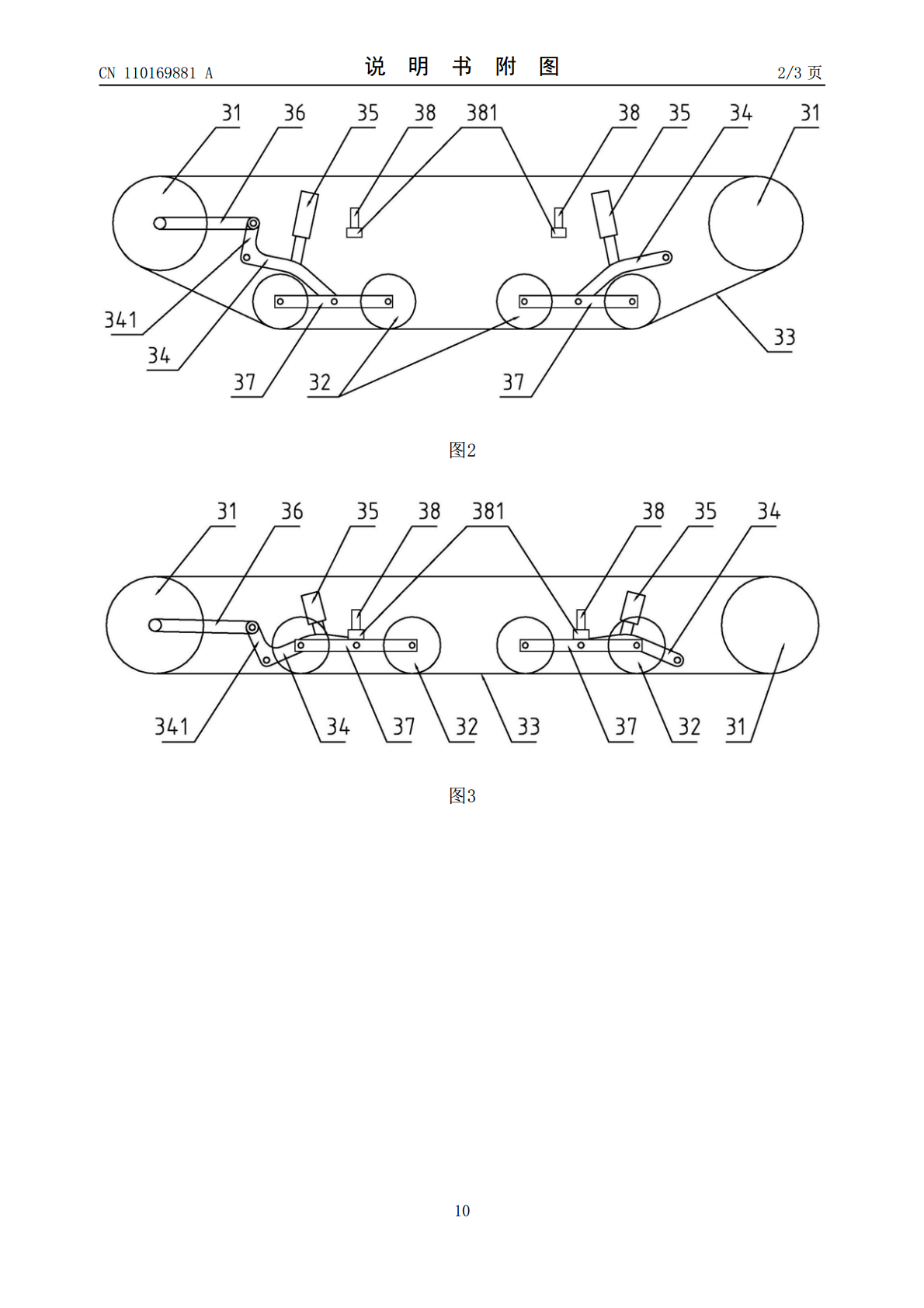
4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多传感器信息融合的智能轮椅.pdf
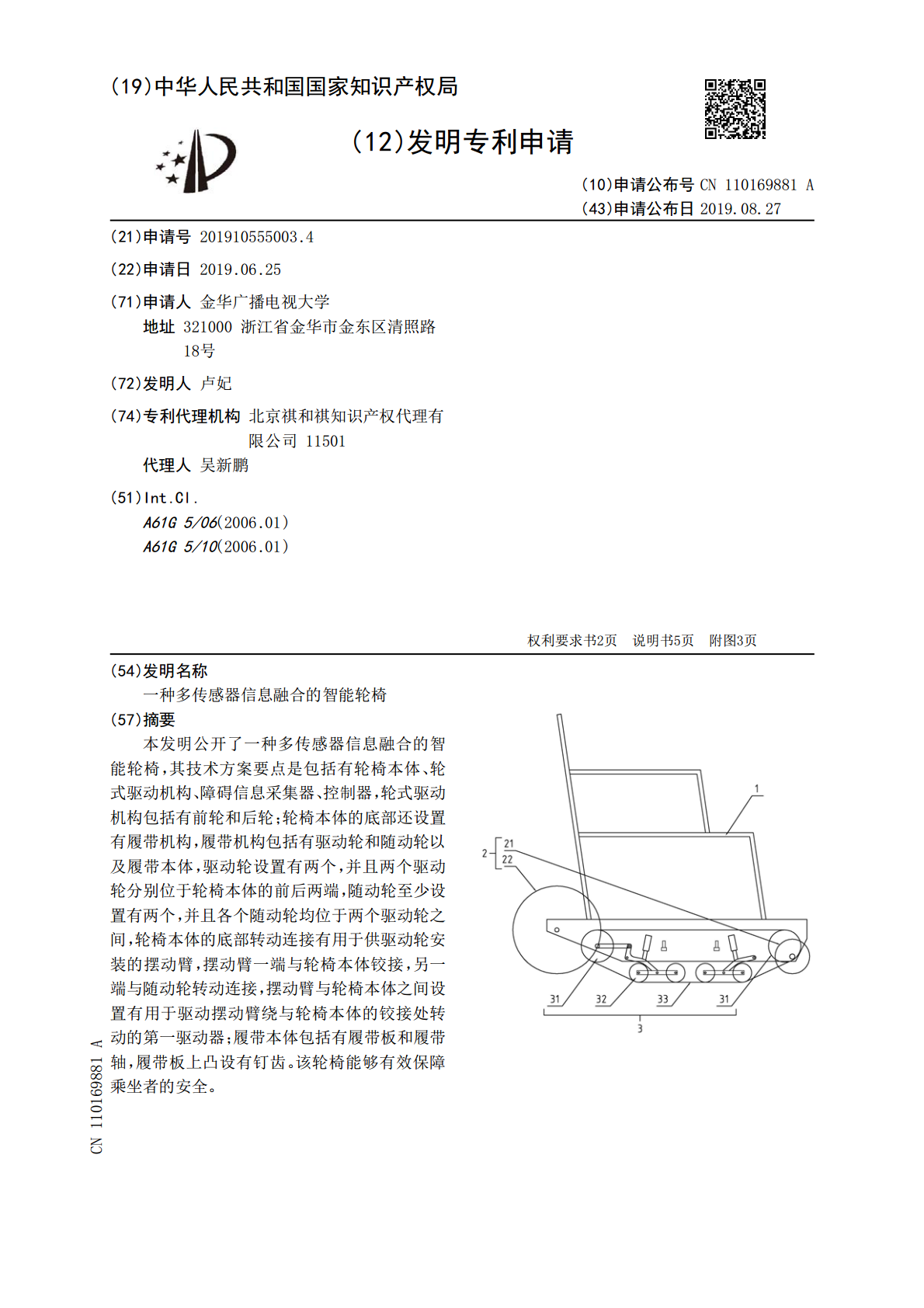
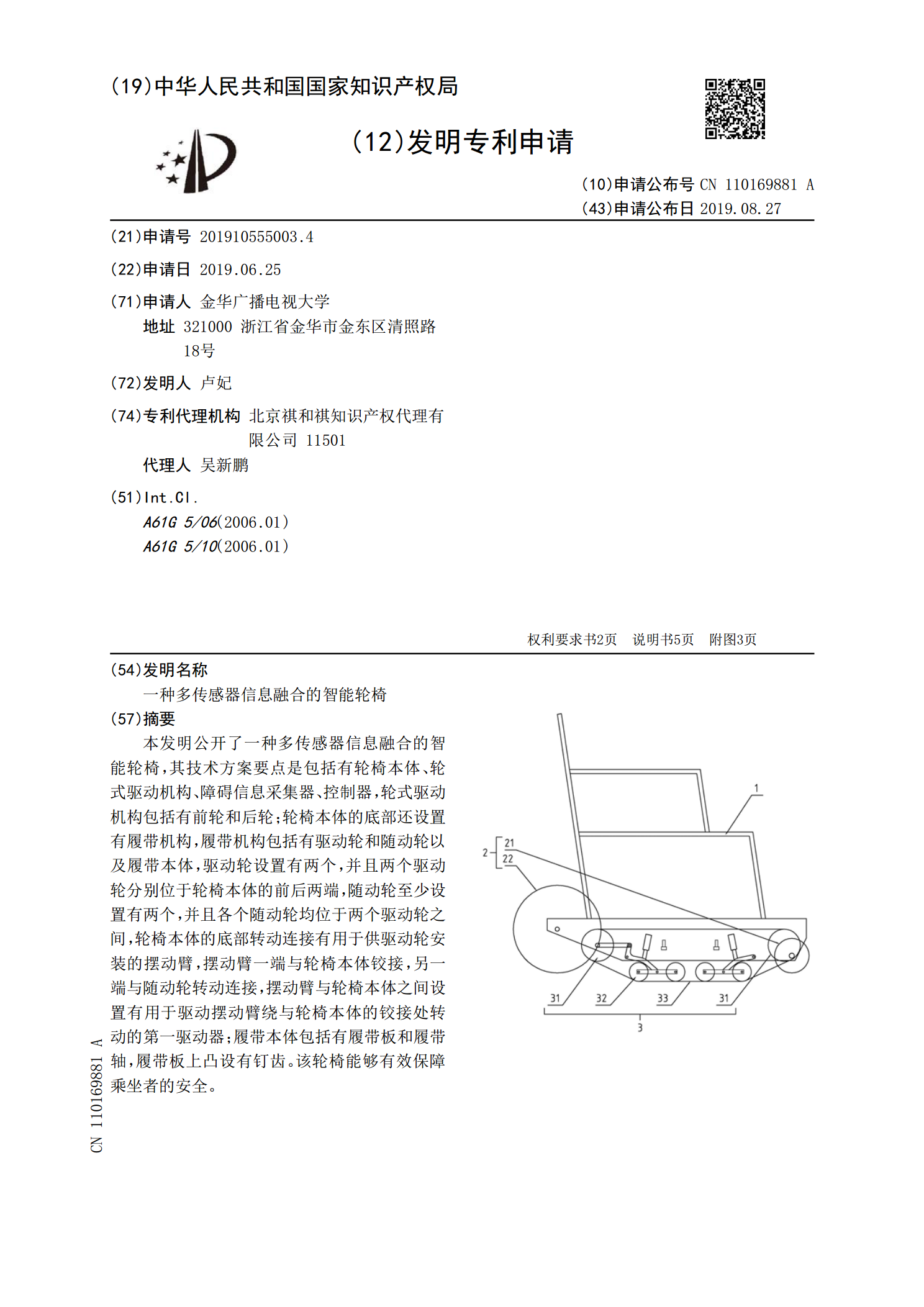
本发明公开了一种多传感器信息融合的智能轮椅,其技术方案要点是包括有轮椅本体、轮式驱动机构、障碍信息采集器、控制器,轮式驱动机构包括有前轮和后轮;轮椅本体的底部还设置有履带机构,履带机构包括有驱动轮和随动轮以及履带本体,驱动轮设置有两个,并且两个驱动轮分别位于轮椅本体的前后两端,随动轮至少设置有两个,并且各个随动轮均位于两个驱动轮之间,轮椅本体的底部转动连接有用于供驱动轮安装的摆动臂,摆动臂一端与轮椅本体铰接,另一端与随动轮转动连接,摆动臂与轮椅本体之间设置有用于驱动摆动臂绕与轮椅本体的铰接处转动的第一驱动

基于多传感器信息融合的智能轮椅避障研究的中期报告.docx
基于多传感器信息融合的智能轮椅避障研究的中期报告一、背景介绍随着全球人口老龄化程度的不断加深,图书馆、医院、商场、机场等人群密集的公共场所对轮椅的需求越来越大,而轮椅避障技术的研究对于实现智能化、无障碍化的公共场所至关重要。传统的轮椅避障技术主要依赖于人工控制,但是这种方法需要人为输入控制指令,且无法处理复杂的环境和情况。因此,基于多传感器信息融合的智能轮椅避障技术应运而生。二、现有研究综述1.传感器选择智能轮椅避障技术涉及到多种传感器的选择和使用,比如激光距离传感器、超声波传感器、红外传感器、视觉传感器

基于信息融合的智能轮椅导航的中期报告.docx
基于信息融合的智能轮椅导航的中期报告中期报告一、研究背景及意义2020年,随着全球人口老龄化的加剧,使得智能轮椅产业逐渐走向成熟,智能轮椅的功能不断完善,智能化程度日益提高。智能轮椅不仅可以为残疾人或者老年人提供便利,更可以通过信息传输和传感器技术进行数据采集和处理,从而对实现轮椅的自主导航提供了条件。基于此,本文的研究基于信息融合的智能轮椅导航,旨在提高智能轮椅的安全性和导航精度,提高轮椅使用者的生活自理能力,增强智能轮椅的应用价值。二、研究内容和进展本研究的主要内容是基于信息融合的智能轮椅导航。本研究

多传感器信息融合技术在智能驾驶系统中的应用.docx
多传感器信息融合技术在智能驾驶系统中的应用摘要:介绍了当今国际上流行的几种智能驾驶系统并分析了采用单一传感器的驾驶系统中存在的问题给出了信息融合技术的原理和结构。讨论了多传感器信息融合技术在智能驾驶系统(ITS)中的应用算法及其有待进一步解决的问题。关键词:贝叶斯估计信息融合障碍探测智能驾驶随着传感器技术、信息处理技术、测量技术与计算机技术的发展智能驾驶系统(辅助驾驶系统一无人驾驶系统)也得了飞速的发展。消费者越来越注重驾驶的安全性与舒适性这就要求传感器能识
多传感器信息融合技术在智能驾驶系统中的应用.docx
多传感器信息融合技术在智能驾驶系统中的应用摘要:介绍了当今国际上流行的几种智能驾驶系统并分析了采用单一传感器的驾驶系统中存在的问题给出了信息融合技术的原理和结构。讨论了多传感器信息融合技术在智能驾驶系统(ITS)中的应用算法及其有待进一步解决的问题。关键词:贝叶斯估计信息融合障碍探测智能驾驶随着传感器技术、信息处理技术、测量技术与计算机技术的发展智能驾驶系统(辅助驾驶系统一无人驾驶系统)也得了飞速的发展。消费者越来越注重驾驶的安全性与舒适性这就要求传感器能识