
二自由度轮-腿复合球面机构及水下机器人.pdf

雨巷****珺琦

1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

二自由度轮-腿复合球面机构及水下机器人.pdf
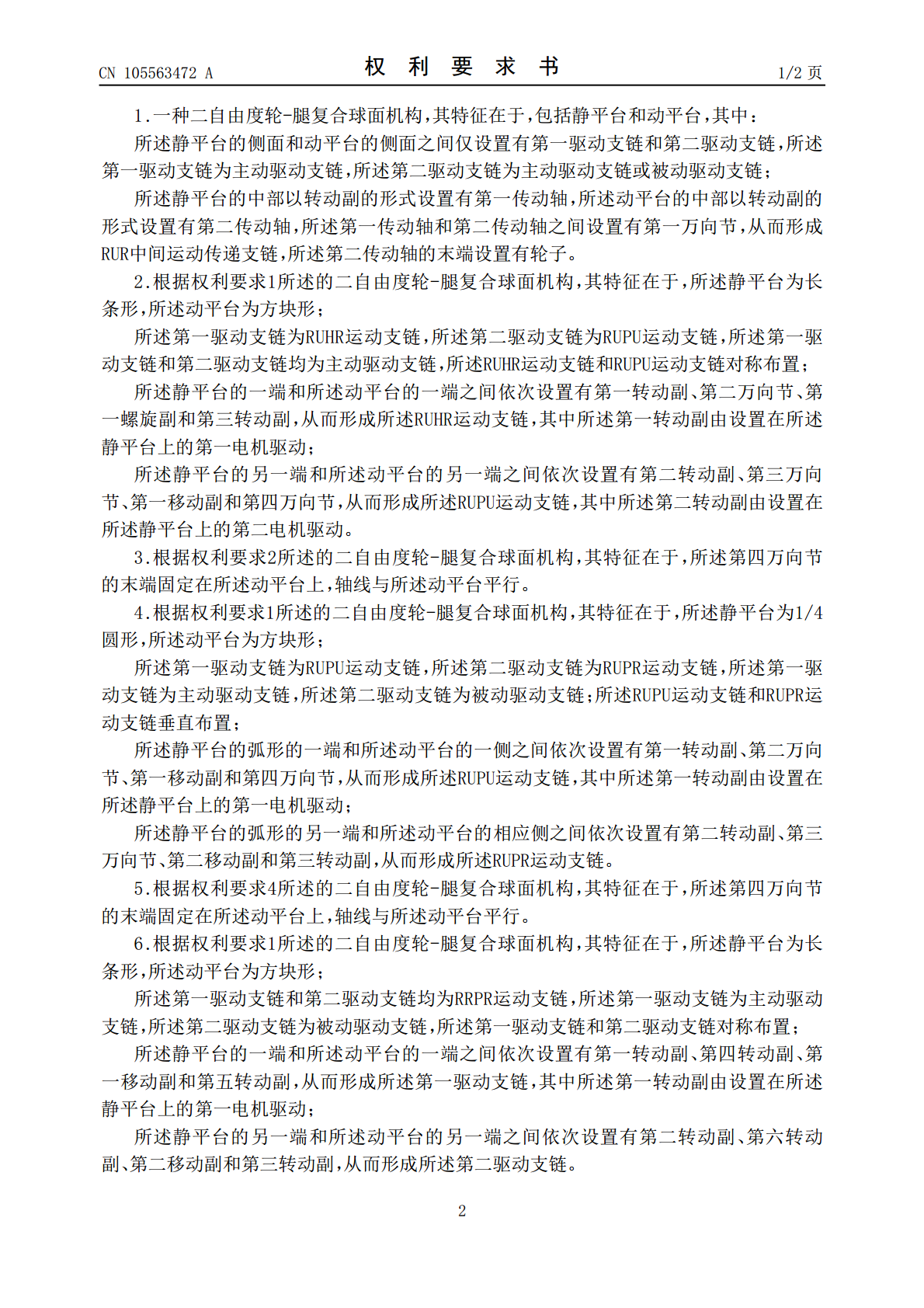
本发明公开了一种二自由度轮-腿复合球面机构及水下机器人,属于机器人领域。所述二自由度轮-腿复合球面机构包括静平台和动平台,所述静平台和动平台之间设置有第一驱动支链、第二驱动支链和RUR中间运动传递支链。本发明中,第一驱动支链、第二驱动支链和RUR中间运动传递支链共同构成了一种新型的球面二自由度的轮-腿复合并联机构。本发明利用新型球面并联机构改变了轮的空间运动姿态,从而实现了水下机器人行走时的转向和越障的姿态调整动作。本发明具有结构简单,安装便利,控制方便,转向、越障性能好等特点。
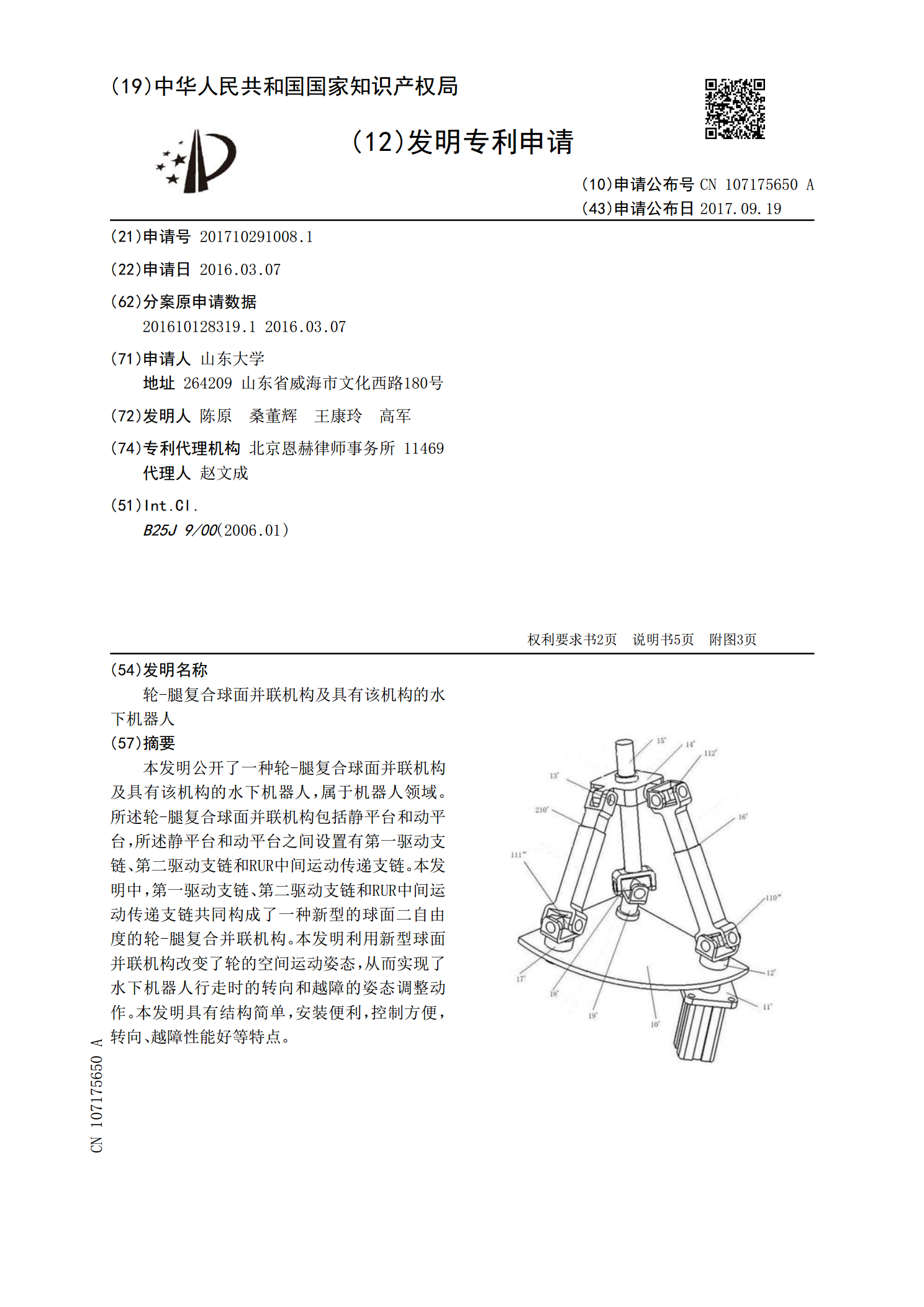
轮‑腿复合球面并联机构及具有该机构的水下机器人.pdf
本发明公开了一种轮‑腿复合球面并联机构及具有该机构的水下机器人,属于机器人领域。所述轮‑腿复合球面并联机构包括静平台和动平台,所述静平台和动平台之间设置有第一驱动支链、第二驱动支链和RUR中间运动传递支链。本发明中,第一驱动支链、第二驱动支链和RUR中间运动传递支链共同构成了一种新型的球面二自由度的轮‑腿复合并联机构。本发明利用新型球面并联机构改变了轮的空间运动姿态,从而实现了水下机器人行走时的转向和越障的姿态调整动作。本发明具有结构简单,安装便利,控制方便,转向、越障性能好等特点。
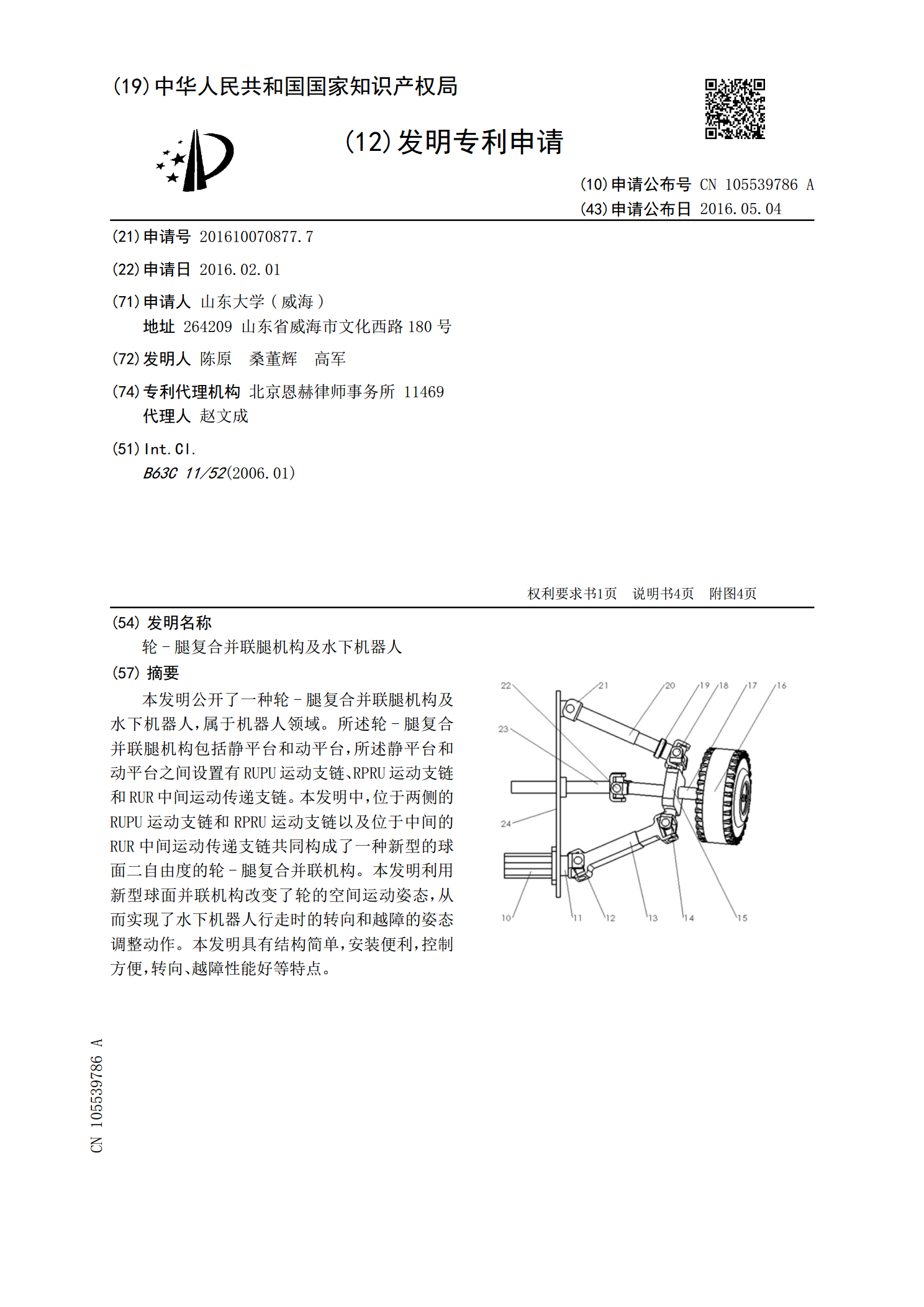
轮-腿复合并联腿机构及水下机器人.pdf
本发明公开了一种轮-腿复合并联腿机构及水下机器人,属于机器人领域。所述轮-腿复合并联腿机构包括静平台和动平台,所述静平台和动平台之间设置有RUPU运动支链、RPRU运动支链和RUR中间运动传递支链。本发明中,位于两侧的RUPU运动支链和RPRU运动支链以及位于中间的RUR中间运动传递支链共同构成了一种新型的球面二自由度的轮-腿复合并联机构。本发明利用新型球面并联机构改变了轮的空间运动姿态,从而实现了水下机器人行走时的转向和越障的姿态调整动作。本发明具有结构简单,安装便利,控制方便,转向、越障性能好等特点。
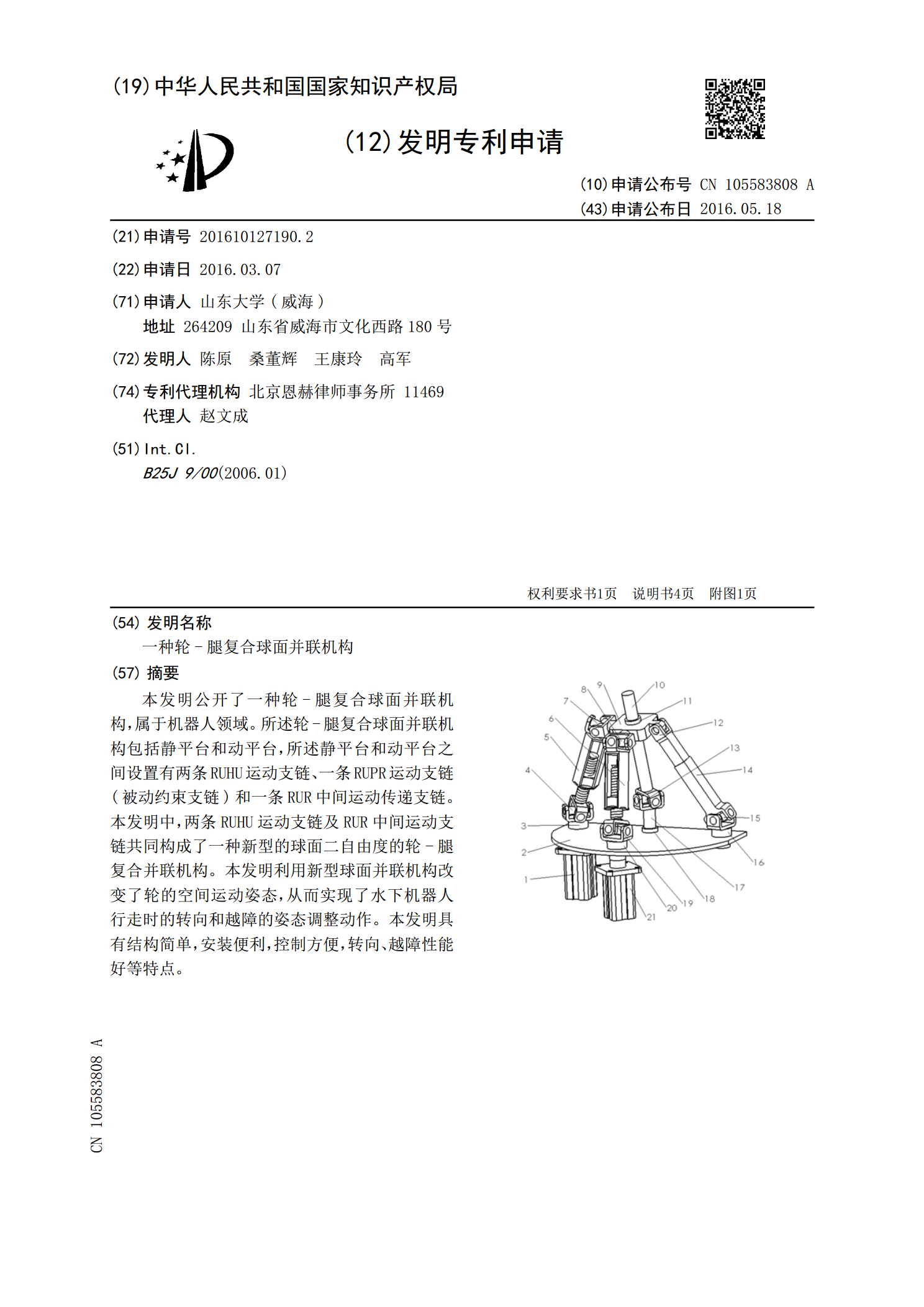
一种轮-腿复合球面并联机构.pdf
本发明公开了一种轮-腿复合球面并联机构,属于机器人领域。所述轮-腿复合球面并联机构包括静平台和动平台,所述静平台和动平台之间设置有两条RUHU运动支链、一条RUPR运动支链(被动约束支链)和一条RUR中间运动传递支链。本发明中,两条RUHU运动支链及RUR中间运动支链共同构成了一种新型的球面二自由度的轮-腿复合并联机构。本发明利用新型球面并联机构改变了轮的空间运动姿态,从而实现了水下机器人行走时的转向和越障的姿态调整动作。本发明具有结构简单,安装便利,控制方便,转向、越障性能好等特点。
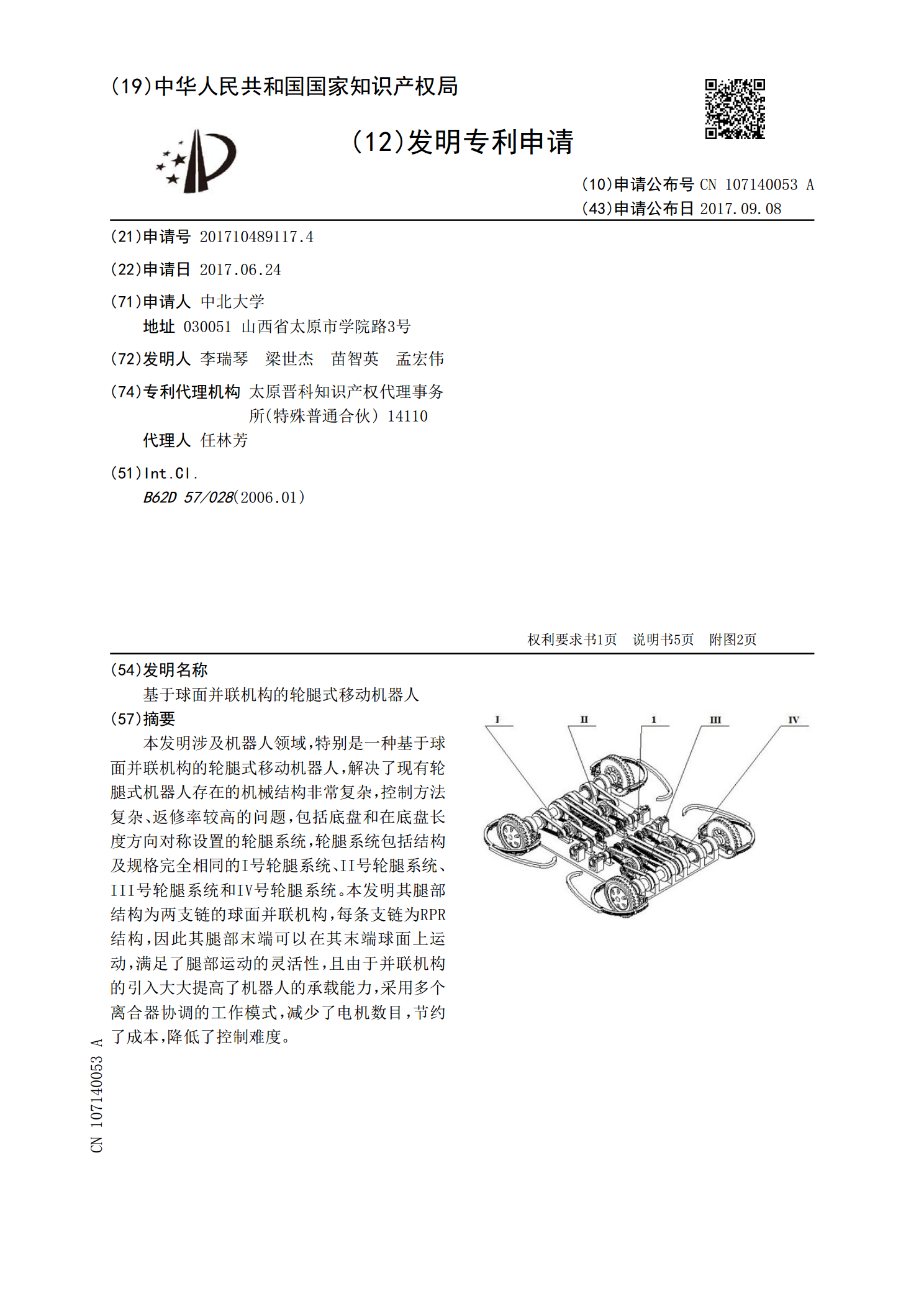
基于球面并联机构的轮腿式移动机器人.pdf
本发明涉及机器人领域,特别是一种基于球面并联机构的轮腿式移动机器人,解决了现有轮腿式机器人存在的机械结构非常复杂,控制方法复杂、返修率较高的问题,包括底盘和在底盘长度方向对称设置的轮腿系统,轮腿系统包括结构及规格完全相同的I号轮腿系统、II号轮腿系统、III号轮腿系统和IV号轮腿系统。本发明其腿部结构为两支链的球面并联机构,每条支链为RPR结构,因此其腿部末端可以在其末端球面上运动,满足了腿部运动的灵活性,且由于并联机构的引入大大提高了机器人的承载能力,采用多个离合器协调的工作模式,减少了电机数目,节约了