
一种搬运机器人的平移七轴结构.pdf

阳炎****找我


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种搬运机器人的平移七轴结构.pdf
本发明公开了一种搬运机器人的平移七轴结构,它包括:横截面呈椭圆形框体的主臂,分别平行安装在所述主臂顶部左右两侧的两条顶面导轨,分别平行安装在所述主臂底部左右两侧的两条底面导轨,滑动连接在所述顶面导轨上、且与机器人第六轴的端部法兰固定连接的机器人安装座,固定安装在所述机器人安装座上的伺服电机,与所述伺服电机相连的主带轮,其中部缠绕所述主带轮上、而两端分别固定在所述主臂前后两端部的主皮带,分别旋转安装在所述主臂的前后两端部的两个副带轮,滑动连接在所述底面导轨上的抓手安装板,传动连接在所述两个副带轮之间、且与所

冲压用搬运机器人的直线七轴.pdf
本发明公开了一种重量轻、刚度高、惯性小、移动速度快的冲压用搬运机器人的直线七轴,包括主臂、直线移动装置及端拾器安装板。主臂包括横截面呈矩形框体的主臂主体及分别连接在主臂主体的下端前、后侧的前、后撑板。直线移动装置包括一对侧面导轨、一对底面导轨、伺服电机、主带轮、一对导轮、一对付带轮、主皮带及付皮带;一对侧面导轨分别安装在主臂主体的前、后侧面上;一对底面导轨安装在主臂主体的下端面;伺服电机安装在一动力支座上,该动力支座以位于主臂主体的上方的方式安装在一对侧面导轨上并连接在主皮带上;主带轮安装在伺服电机上;一

一种多轴联动搬运机器人.pdf
本实用新型公开了一种多轴联动搬运机器人,包括:底盘、支撑座、第一伸缩摆臂、第二伸缩摆臂及机械爪。底盘固定在外部的工作台上,支撑座固定在底盘上,第一伸缩摆臂的底端转动连接在支撑座上,第二伸缩摆臂的底端转动连接在第一伸缩摆臂的顶端,机械爪转动连接在第二伸缩摆臂的顶端。支撑座上设有第一电机,第一伸缩摆臂的顶端设有第二电机,第二伸缩摆臂的顶端设有第三电机。第一电机、第二电机、第三电机、第一伸缩摆臂及第二伸缩摆臂均与外部的控制端控制连接。本实用新型的有益效果:该多轴联动搬运机器人通过将摆臂设置成伸缩结构,各摆臂之间

一种钢筋搬运机器人结构.pdf
本发明涉及一种钢筋搬运机器人结构,包括底座,所述底座顶部设有旋转盘,所述旋转盘顶部设有旋转槽,所述旋转盘一侧设有设有旋转电机,所述旋转盘上方设有支撑座,所述支撑座底部设有旋转轮,且所述旋转轮设于旋转槽内腔,所述支撑座底部边缘设有齿轮条,且所述旋转电机的通过齿轮与齿轮条连接,所述支撑座一侧设有伸缩杆,所述支撑座顶部设有放置板,所述放置板顶部一侧设有推板,所述推板一侧对称设有轴承座,且所述轴承座与放置板固定连接,所述轴承座一侧通过轴承连接有螺母,所述螺母内腔套装有丝杠,结构简单,设计合理,能够方便钢筋运输,使
2021233053645一种工业件搬运六轴工业机器人.pdf
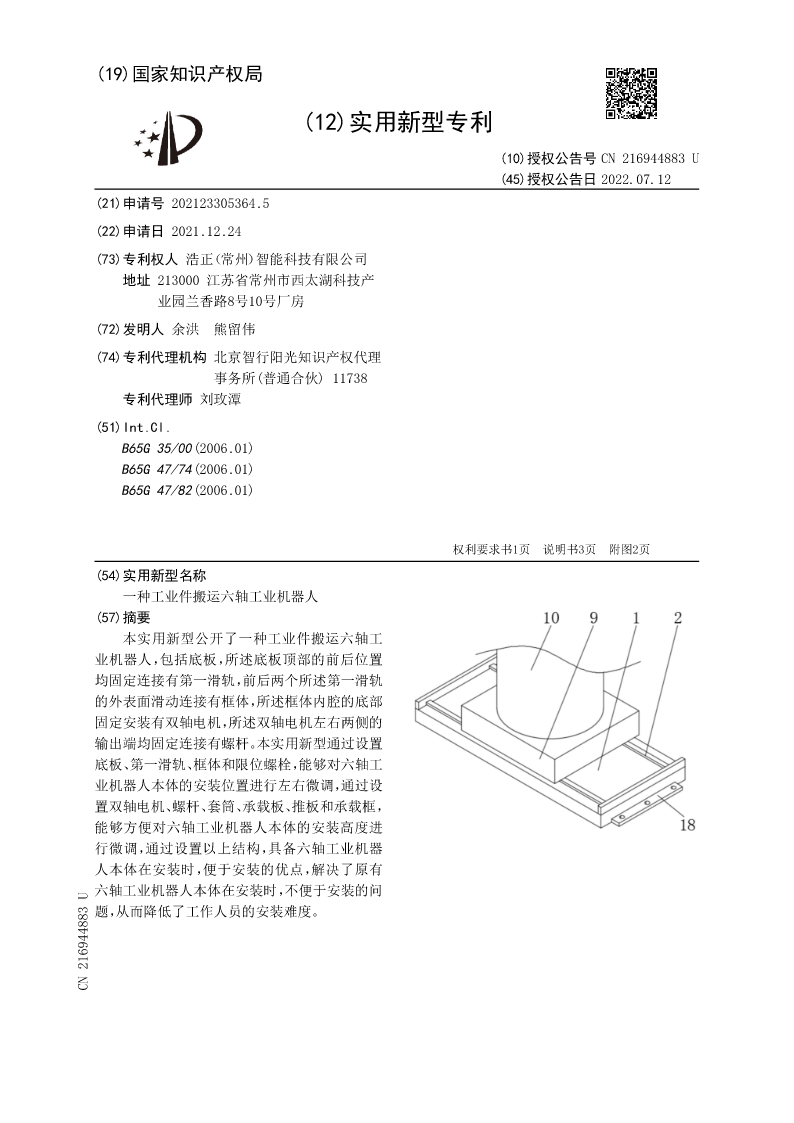
(19)国家知识产权局(12)实用新型专利(10)授权公告号CN216944883U(45)授权公告日2022.07.12(21)申请号202123305364.5(22)申请日2021.12.24(73)专利权人浩正(常州)智能科技有限公司地址213000江苏省常州市西太湖科技产业园兰香路8号10号厂房(72)发明人余洪熊留伟(74)专利代理机构北京智行阳光知识产权代理事务所(普通合伙)11738专利代理师刘玫潭(51)Int.Cl.B65G35/00(2006.01)B65G47/74(2006.01