
基于RBF神经网络的大型风电机组独立变桨控制方法.pdf

书生****12

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于RBF神经网络的大型风电机组独立变桨控制方法.pdf
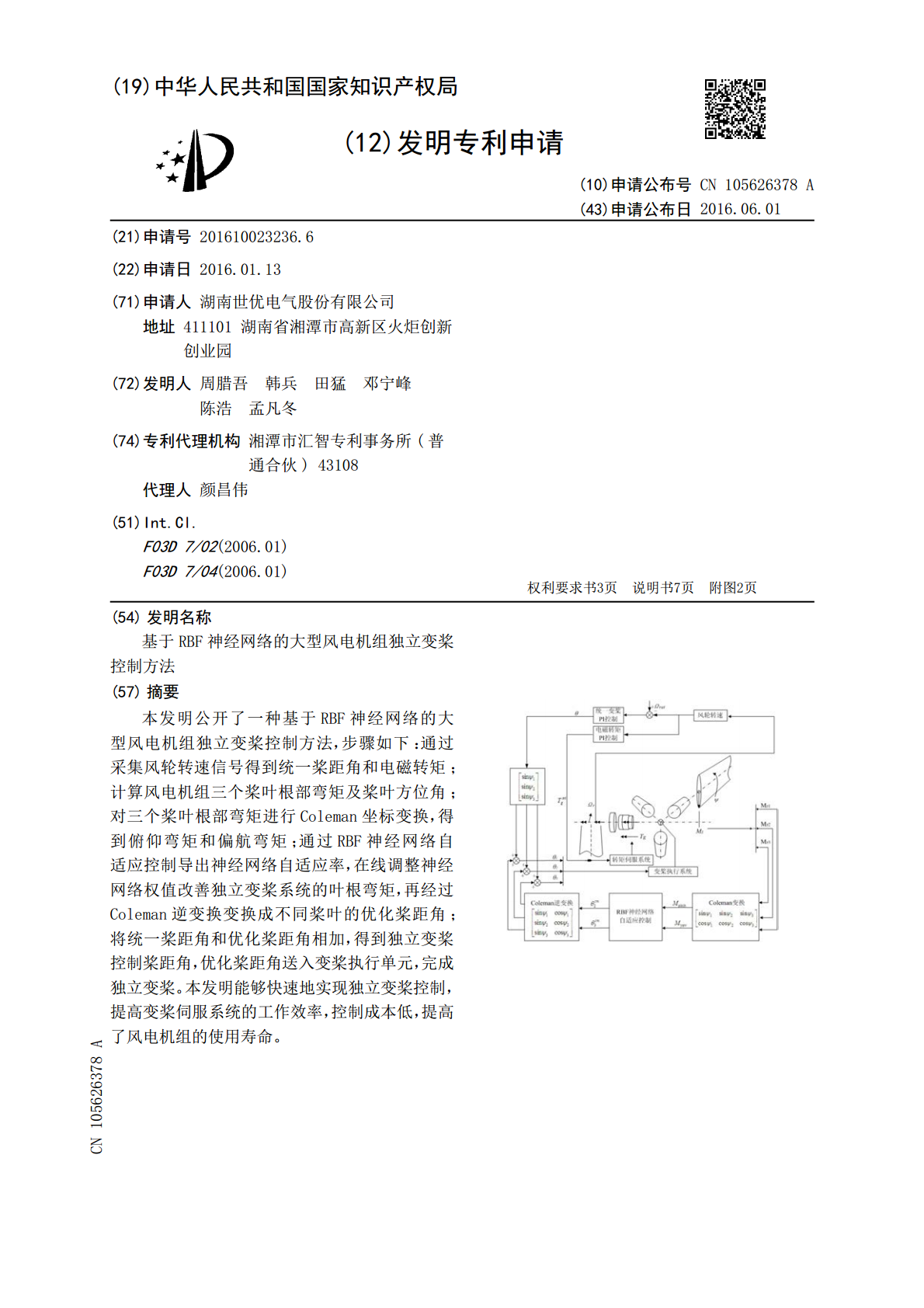
本发明公开了一种基于RBF神经网络的大型风电机组独立变桨控制方法,步骤如下:通过采集风轮转速信号得到统一桨距角和电磁转矩;计算风电机组三个桨叶根部弯矩及桨叶方位角;对三个桨叶根部弯矩进行Coleman坐标变换,得到俯仰弯矩和偏航弯矩;通过RBF神经网络自适应控制导出神经网络自适应率,在线调整神经网络权值改善独立变桨系统的叶根弯矩,再经过Coleman逆变换变换成不同桨叶的优化桨距角;将统一桨距角和优化桨距角相加,得到独立变桨控制桨距角,优化桨距角送入变桨执行单元,完成独立变桨。本发明能够快速地实现独立变桨

一种大型风电机组独立变桨控制方法.pdf
一种大型风电机组独立变桨控制方法,包括协同变桨控制过程:检测出发电机转速ωg,与参考转速ωref相减得出转速偏差Δω,经PI控制,得出协同变桨控制期望输出的协同节距角βc;还包括偏差变桨控制过程,所述偏差变桨控制过程:1)检测出叶片根部的载荷(Mz1,Mz2,Mz3)和叶轮方位角信号ψ,主控制器将叶片根部载荷(Mz1,Mz2,Mz3)经Park变换,变换为Mtitl和Myaw载荷分量;2)分别经PI控制器控制,得出输出量(β1cm,β2cm);3)经Park逆变换,得出偏差变桨控制期望输出的偏差

一种大型风电机组独立变桨控制方法及装置.pdf
本发明提供的大型风电机组独立变桨控制方法及装置,是通过测量风机主轴载荷和风轮方位角来获得轮毂固定坐标系上的水平轴弯矩和垂直轴弯矩,实现风电机组独立变桨控制。本发明测量主轴载荷只需要在主轴上安装光纤应变传感器即可,可以减少光纤应变传感器的数量。而且主轴相对于轮毂没有运动,因此测量和信号传输均相对比较简单,也有利于提高载荷信号的可靠性。因此,本发明提供的方法和装置应用的传感器少可以降低成本,并且主轴固定需要的测量方案简单容易实现,由于没有长时间的延迟,因此测量结果比较准确,可靠性高,控制效果更理想。

一种风电机组的独立变桨方法与独立变桨控制装置.pdf
本发明涉及一种风电机组的独立变桨方法与独立变桨控制装置,独立变桨方法包括如下步骤:1)测量风轮方位角;2)通过风轮方位角计算各个风轮叶片方位角;3)设定风轮叶片独立变桨公式;4)利用步骤3)设定的风轮叶片独立变桨公式计算风轮叶片独立变桨角度,对风电机组叶片独立变桨。本发明的有益效果是:在现有非独立变桨的风电机组机型上经过简单的改造即可实现独立变桨功能,能够适当的降低风机叶片的疲劳载荷,延长机组的使用寿命,控制简单可靠,成本较低。
基于激光雷达的风电机组独立变桨控制优化方法及系统.pdf
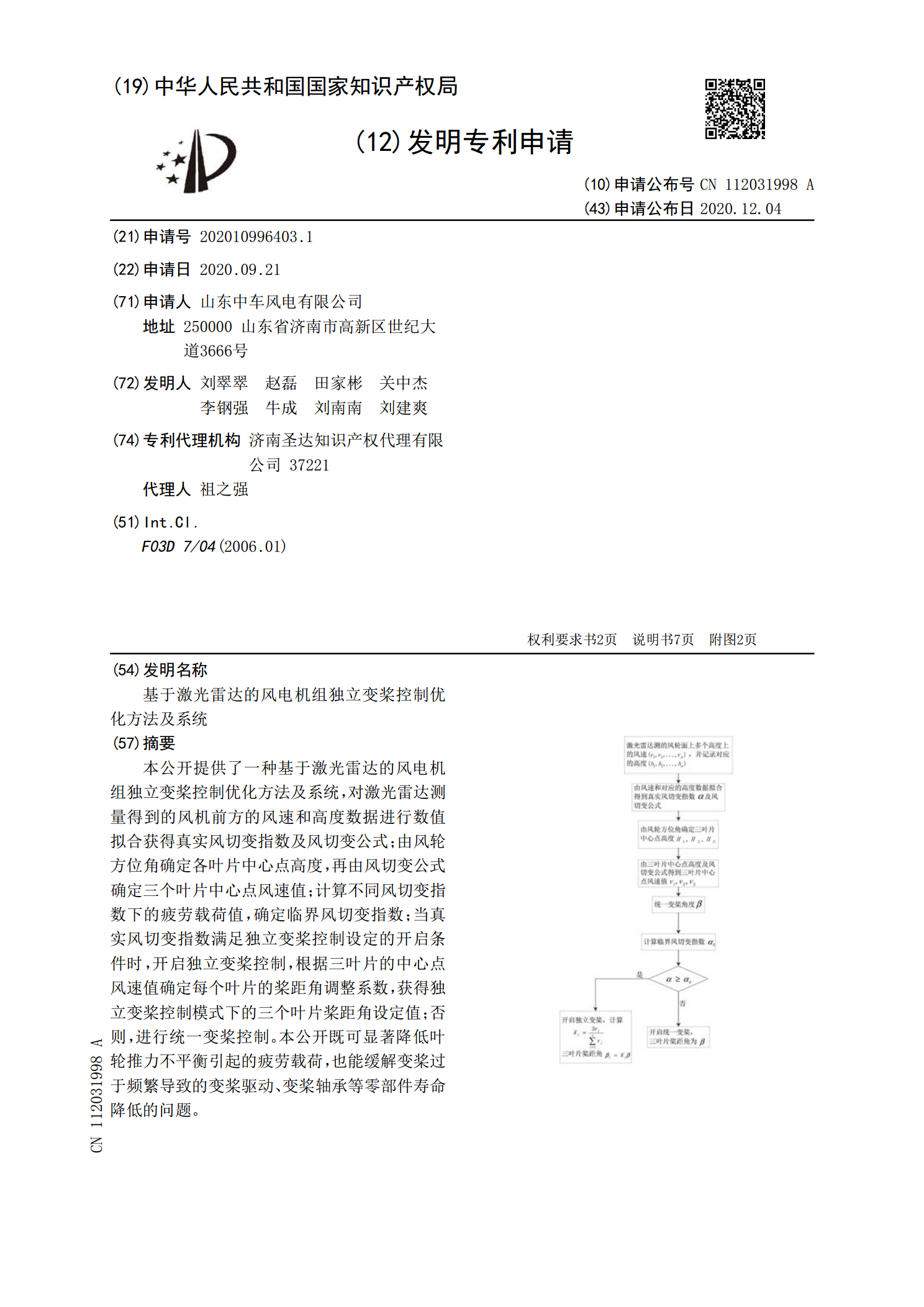
本公开提供了一种基于激光雷达的风电机组独立变桨控制优化方法及系统,对激光雷达测量得到的风机前方的风速和高度数据进行数值拟合获得真实风切变指数及风切变公式;由风轮方位角确定各叶片中心点高度,再由风切变公式确定三个叶片中心点风速值;计算不同风切变指数下的疲劳载荷值,确定临界风切变指数;当真实风切变指数满足独立变桨控制设定的开启条件时,开启独立变桨控制,根据三叶片的中心点风速值确定每个叶片的桨距角调整系数,获得独立变桨控制模式下的三个叶片桨距角设定值;否则,进行统一变桨控制。本公开既可显著降低叶轮推力不平衡引起