
基于激光雷达的风电机组独立变桨控制优化方法及系统.pdf

小沛****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于激光雷达的风电机组独立变桨控制优化方法及系统.pdf
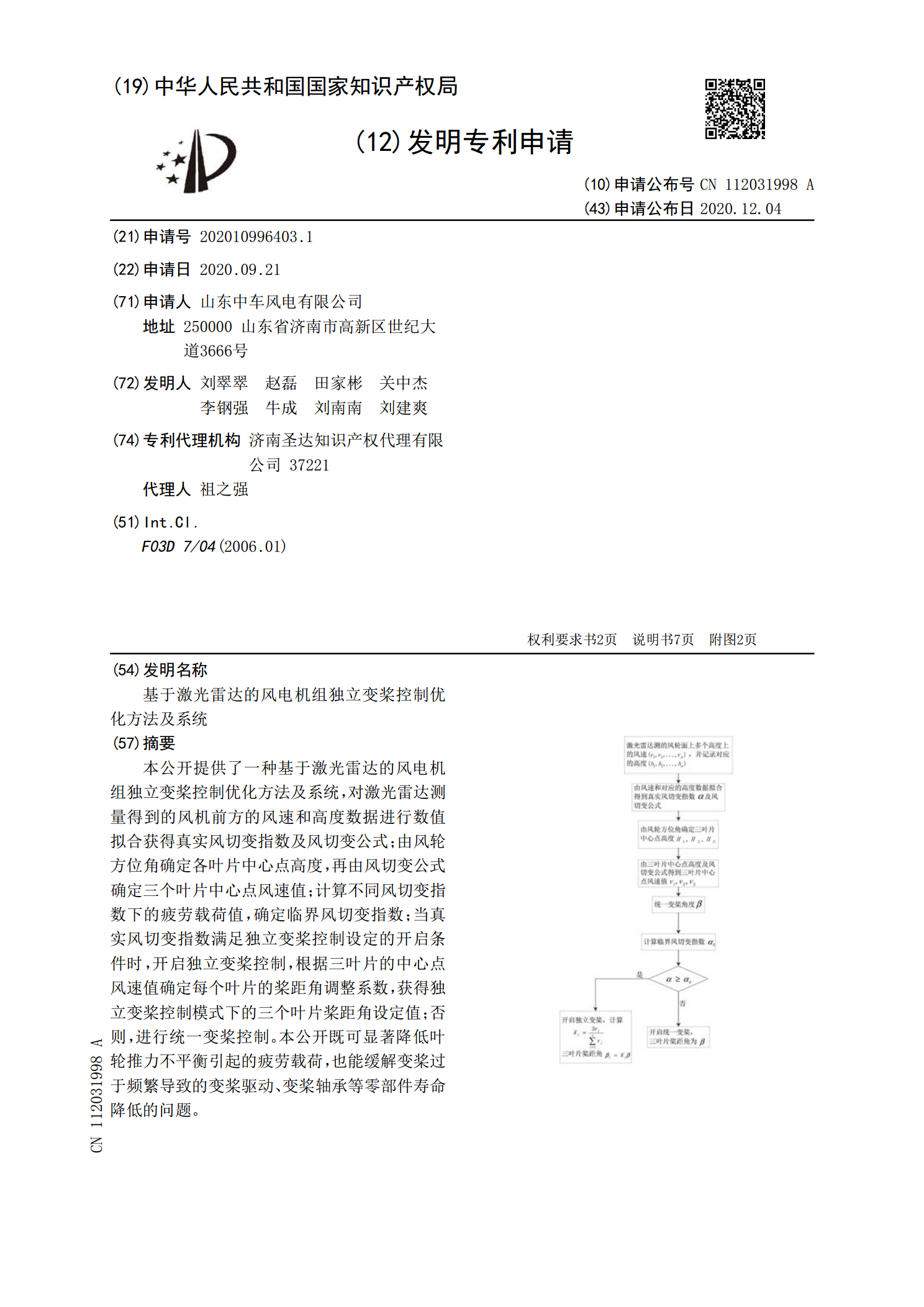
本公开提供了一种基于激光雷达的风电机组独立变桨控制优化方法及系统,对激光雷达测量得到的风机前方的风速和高度数据进行数值拟合获得真实风切变指数及风切变公式;由风轮方位角确定各叶片中心点高度,再由风切变公式确定三个叶片中心点风速值;计算不同风切变指数下的疲劳载荷值,确定临界风切变指数;当真实风切变指数满足独立变桨控制设定的开启条件时,开启独立变桨控制,根据三叶片的中心点风速值确定每个叶片的桨距角调整系数,获得独立变桨控制模式下的三个叶片桨距角设定值;否则,进行统一变桨控制。本公开既可显著降低叶轮推力不平衡引起

一种风电机组的独立变桨方法与独立变桨控制装置.pdf
本发明涉及一种风电机组的独立变桨方法与独立变桨控制装置,独立变桨方法包括如下步骤:1)测量风轮方位角;2)通过风轮方位角计算各个风轮叶片方位角;3)设定风轮叶片独立变桨公式;4)利用步骤3)设定的风轮叶片独立变桨公式计算风轮叶片独立变桨角度,对风电机组叶片独立变桨。本发明的有益效果是:在现有非独立变桨的风电机组机型上经过简单的改造即可实现独立变桨功能,能够适当的降低风机叶片的疲劳载荷,延长机组的使用寿命,控制简单可靠,成本较低。

5 MW风电机组载荷分析与独立变桨控制优化.pptx
,CONTENTS01.02.风电机组工作原理载荷类型与来源载荷分析方法载荷分析结果03.独立变桨控制原理变桨控制策略变桨控制系统组成独立变桨控制优化方案04.优化方案实施步骤优化方案效果评估优化前后对比分析优化方案推广价值05.载荷与变桨控制的关系风电机组运行状态监测风电机组安全性能提升方案风电机组维护与保养建议06.风电机组技术发展趋势独立变桨控制技术发展方向风电机组载荷分析与控制优化的结合点未来研究重点与难点感谢您的观看!

基于功率预测的变速变桨距风电系统的优化控制.docx
基于功率预测的变速变桨距风电系统的优化控制基于功率预测的变速变桨距风电系统的优化控制摘要:随着可再生能源的快速发展,风力发电已成为一种重要的可持续能源。然而,风能资源的波动性给风电系统的运行效率和稳定性带来了挑战。为了提高风电系统的功率输出和稳定性,本文研究了基于功率预测的变速变桨距风电系统的优化控制方法。具体而言,本文通过分析风能资源的特征和风力发电机的工作原理,建立了风功率的预测模型。然后,使用该预测模型来优化变速和变桨距的控制策略,以实现最大化风电系统的功率输出和稳定性。通过对实际风电场的数据进行仿

基于RBF神经网络的大型风电机组独立变桨控制方法.pdf
本发明公开了一种基于RBF神经网络的大型风电机组独立变桨控制方法,步骤如下:通过采集风轮转速信号得到统一桨距角和电磁转矩;计算风电机组三个桨叶根部弯矩及桨叶方位角;对三个桨叶根部弯矩进行Coleman坐标变换,得到俯仰弯矩和偏航弯矩;通过RBF神经网络自适应控制导出神经网络自适应率,在线调整神经网络权值改善独立变桨系统的叶根弯矩,再经过Coleman逆变换变换成不同桨叶的优化桨距角;将统一桨距角和优化桨距角相加,得到独立变桨控制桨距角,优化桨距角送入变桨执行单元,完成独立变桨。本发明能够快速地实现独立变桨