
一种擦玻璃机器人及其工作方法.pdf

纪阳****公主

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种擦玻璃机器人及其工作方法.pdf
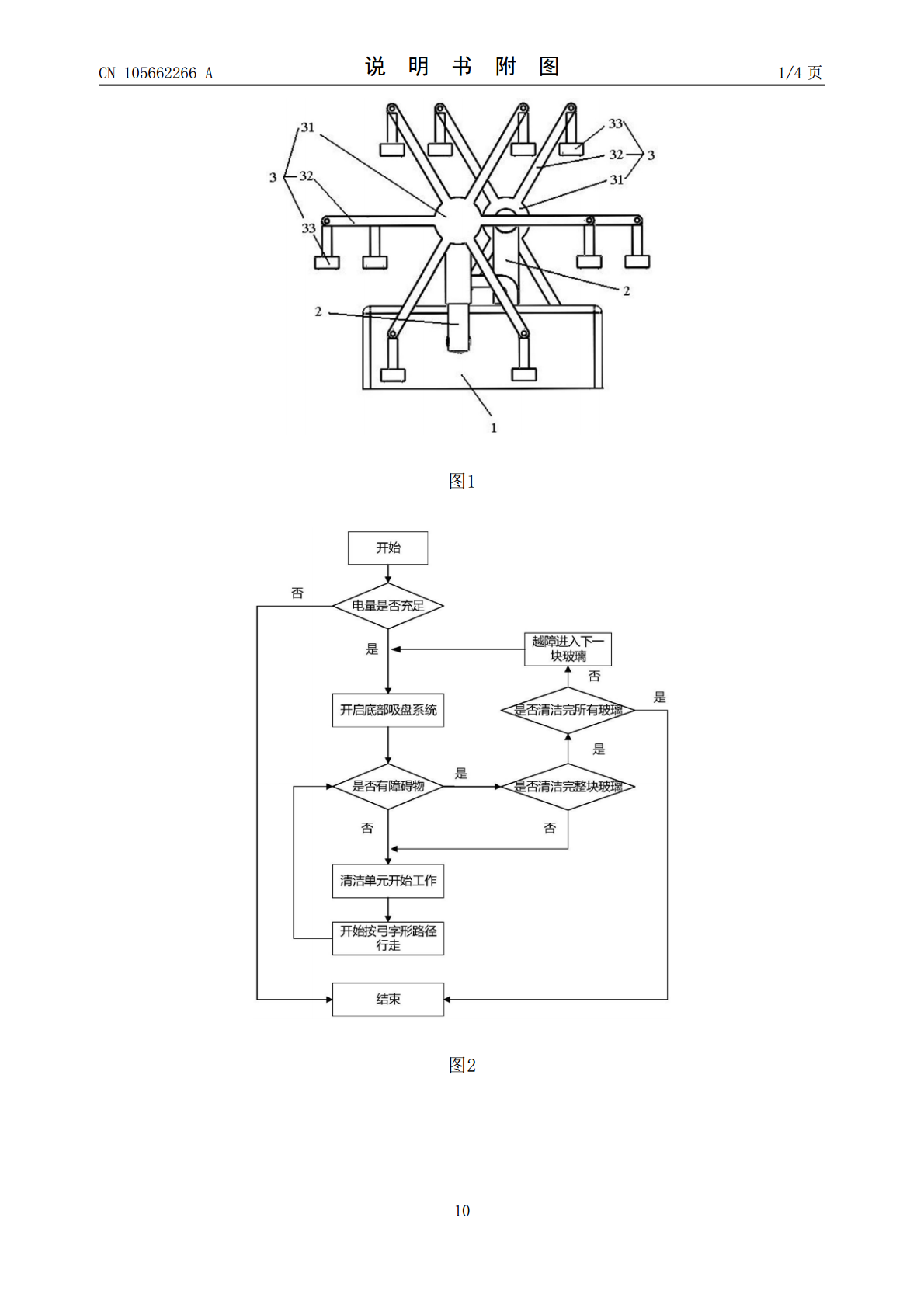
本发明涉及一种擦玻璃机器人,包括擦洗机构本体,两个分别设于擦洗机构本体两侧且沿擦洗机构本体越障方向前后布置的越障机构,每个越障机构包括伸缩曲轴、行走轮和驱动组件,伸缩曲轴一端与擦洗机构本体转动连接,行走轮转动连接于伸缩曲轴另一端且在伸缩曲轴的驱动下伸缩移动,驱动组件与行走轮连接,用于驱动行走轮转动;行走轮包括轮盘,轮盘周向设有多根长度相等且均匀排布的辐条,每根辐条的端部铰接一个行走吸盘。通过控制伸缩曲轴收缩,使行走吸盘落至玻璃表面进行吸附固定,使擦洗机构本体抬起离开玻璃表面并高于窗户框,行走吸盘呈非对称式
一种擦玻璃机器人及其控制方法.pdf
本发明提供一种擦玻璃机器人及其控制方法,所述擦玻璃机器人包括机体和控制单元,还包括设置在所述机体底部可旋转的两个清洁单元,两个清洁单元通过连接臂杆进行连接,两个清洁单元内部分别设置有空腔、空气压缩单元、驱动空气压缩单元和驱动单元;所述空气压缩单元用于抽取空腔内部的空气并使清洁单元吸附在玻璃上,所述驱动空气压缩单元用于驱动所述空气压缩单元;所述驱动单元连接所述连接臂杆,所述驱动单元用于驱动所述清洁单元相对于连接臂杆进行上下、左右移动或静止,以及驱动所述清洁单元以垂直于玻璃表面的竖直轴为中心进行旋转或静止;所

一种擦玻璃机器人及其擦拭方法.pdf
本发明公开一种擦玻璃机器人及其擦拭方法,其中所述擦玻璃机器人(100)包括控制模块(110)及与其相连接的电源模块(120)、行走模块(130)、吸附模块(140)和清洁模块(150),所述清洁模块(150)包括第一储液箱(151)、第二储液箱(152)、喷洒器(153)和海绵擦拭块(154),所述喷洒器(153)与所述第一储液箱(151)、第二储液箱(152)和海绵擦拭块(154)连接,所述第一储液箱(151)用于存储玻璃清洁剂,所述第二储液箱(152)用于储存水。本发明能够实现玻璃清洁剂和水先后两次单
一种擦玻璃机器人.pdf
本发明公开了一种擦玻璃机器人,包括底座,所述底座顶部设置有支撑柱,所述支撑柱表面设置有机箱,所述底座与机箱之间设置有电动推杆,所述机箱内部设置有活动架,所述活动架两端均设置有链轮,两个所述链轮之间设置有齿带,所述活动架表面设置有活动块,所述活动架顶部表面设置有第一滑槽,所述活动块顶部设置有滑轮,所述活动块内部设置有固定块,所述活动块与固定块之间设置有连接块,所述活动架底部表面设置有第二滑槽。本发明通过设置底座、支撑柱、机箱、电动推杆、活动架、齿带、活动块、固定块、转动轮、清洁盘、夹槽和弹簧,有利于将机器人
一种擦玻璃机器人.pdf
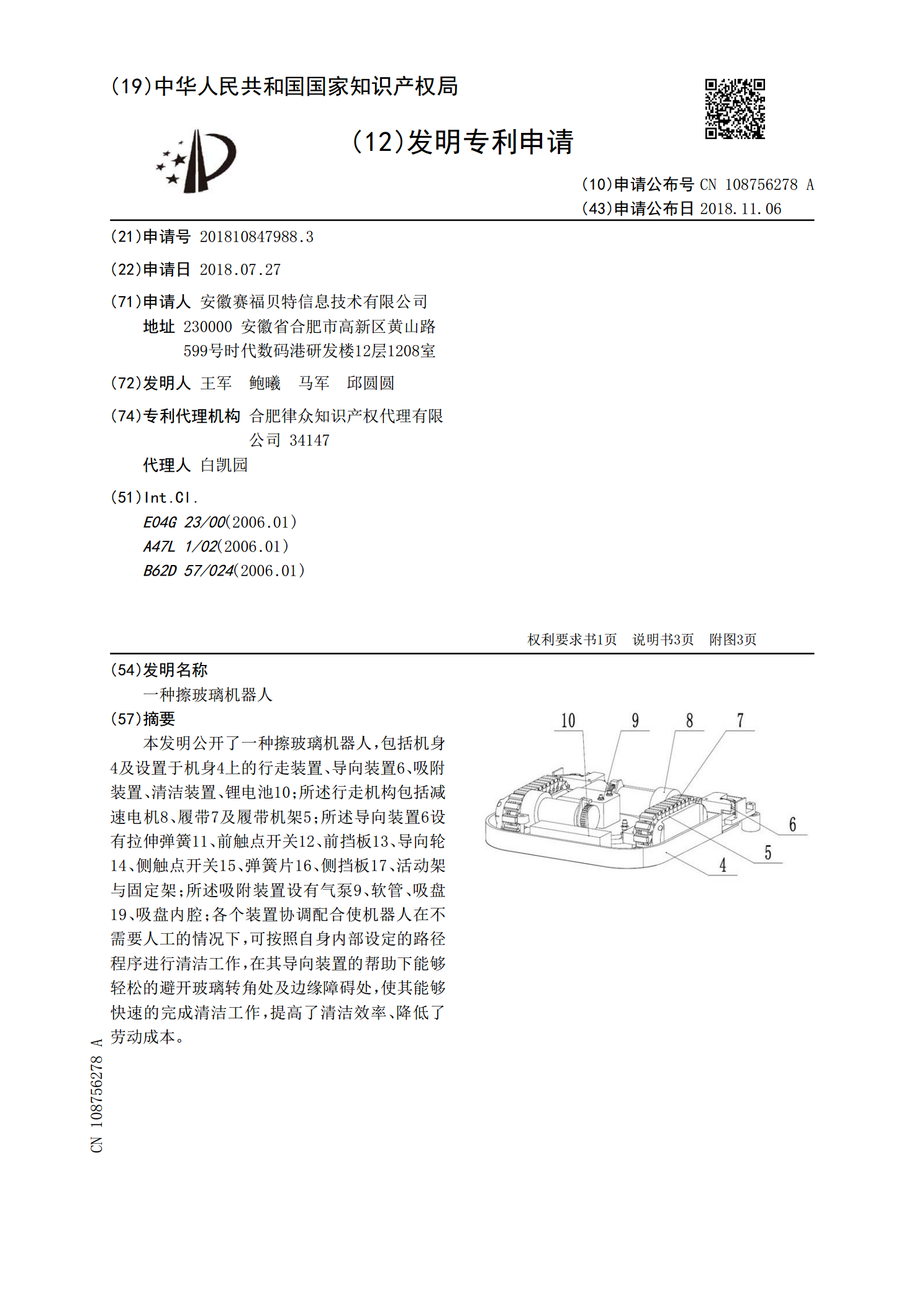
本发明公开了一种擦玻璃机器人,包括机身4及设置于机身4上的行走装置、导向装置6、吸附装置、清洁装置、锂电池10;所述行走机构包括减速电机8、履带7及履带机架5;所述导向装置6设有拉伸弹簧11、前触点开关12、前挡板13、导向轮14、侧触点开关15、弹簧片16、侧挡板17、活动架与固定架;所述吸附装置设有气泵9、软管、吸盘19、吸盘内腔;各个装置协调配合使机器人在不需要人工的情况下,可按照自身内部设定的路径程序进行清洁工作,在其导向装置的帮助下能够轻松的避开玻璃转角处及边缘障碍处,使其能够快速的完成清洁工作