
电动平衡车及其复位方法.pdf

书生****12


1/10
2/10
3/10
4/10
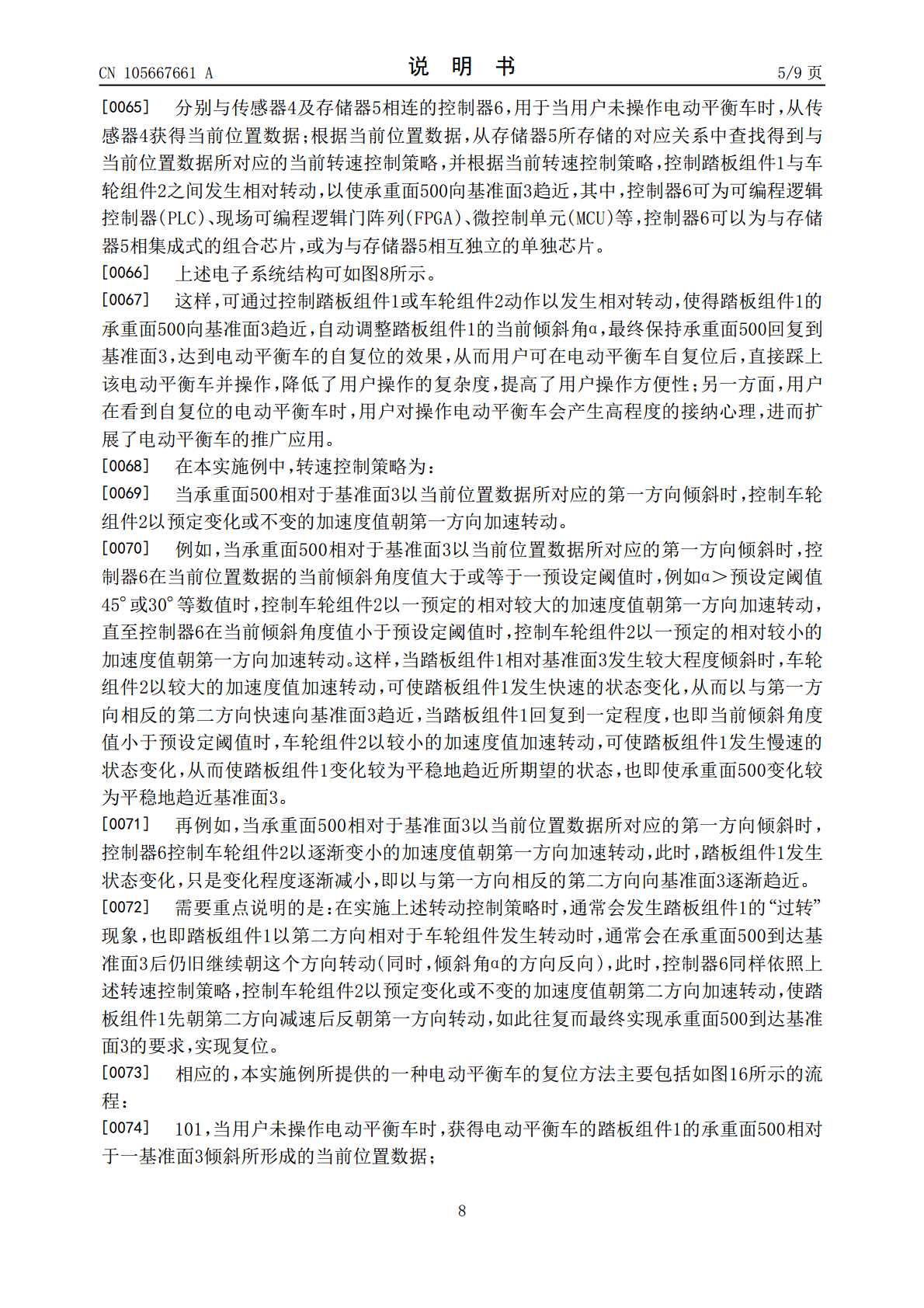
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
电动平衡车及其复位方法.pdf
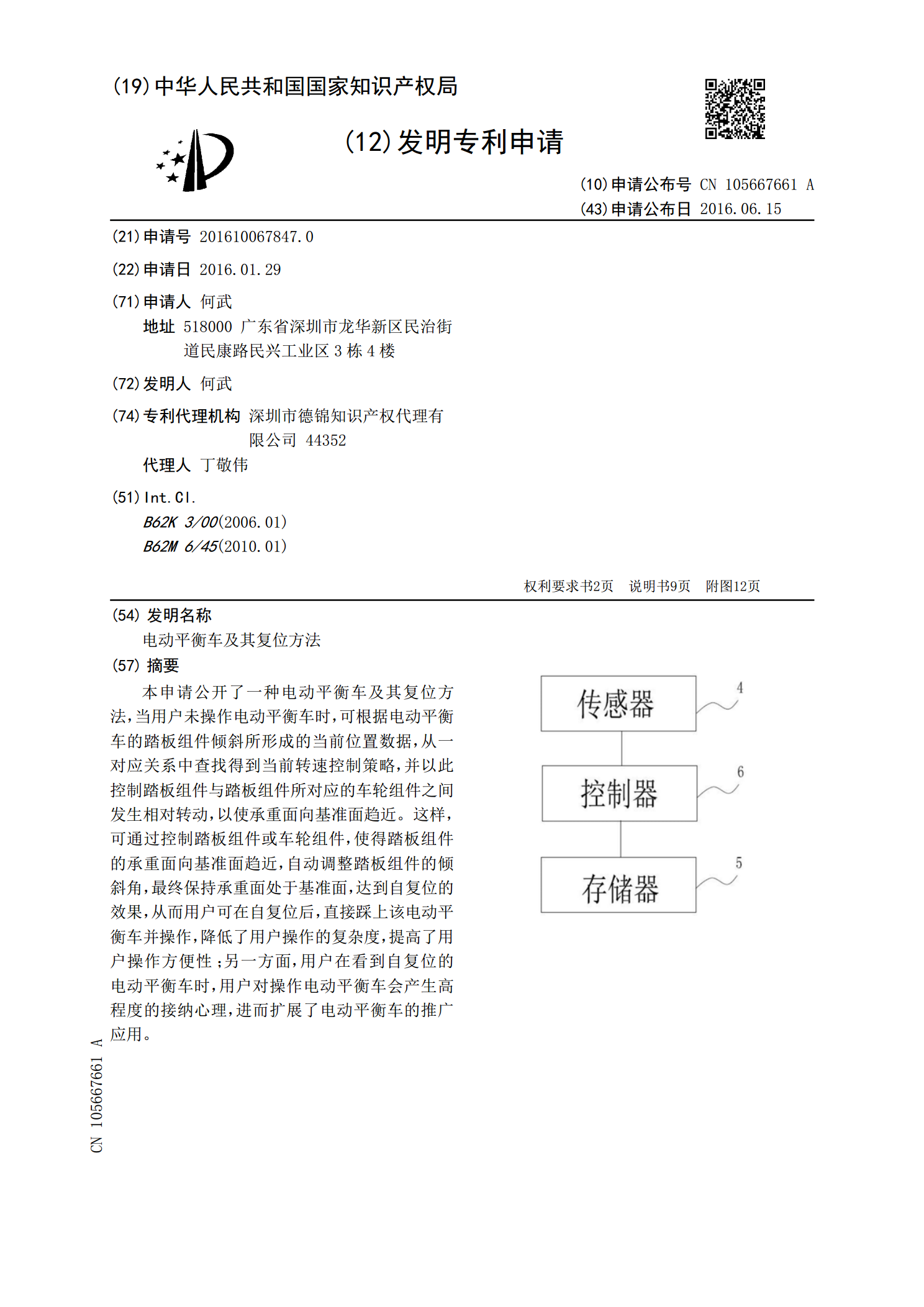
本申请公开了一种电动平衡车及其复位方法,当用户未操作电动平衡车时,可根据电动平衡车的踏板组件倾斜所形成的当前位置数据,从一对应关系中查找得到当前转速控制策略,并以此控制踏板组件与踏板组件所对应的车轮组件之间发生相对转动,以使承重面向基准面趋近。这样,可通过控制踏板组件或车轮组件,使得踏板组件的承重面向基准面趋近,自动调整踏板组件的倾斜角,最终保持承重面处于基准面,达到自复位的效果,从而用户可在自复位后,直接踩上该电动平衡车并操作,降低了用户操作的复杂度,提高了用户操作方便性;另一方面,用户在看到自复位的电
电动平衡车及其控制方法.pdf
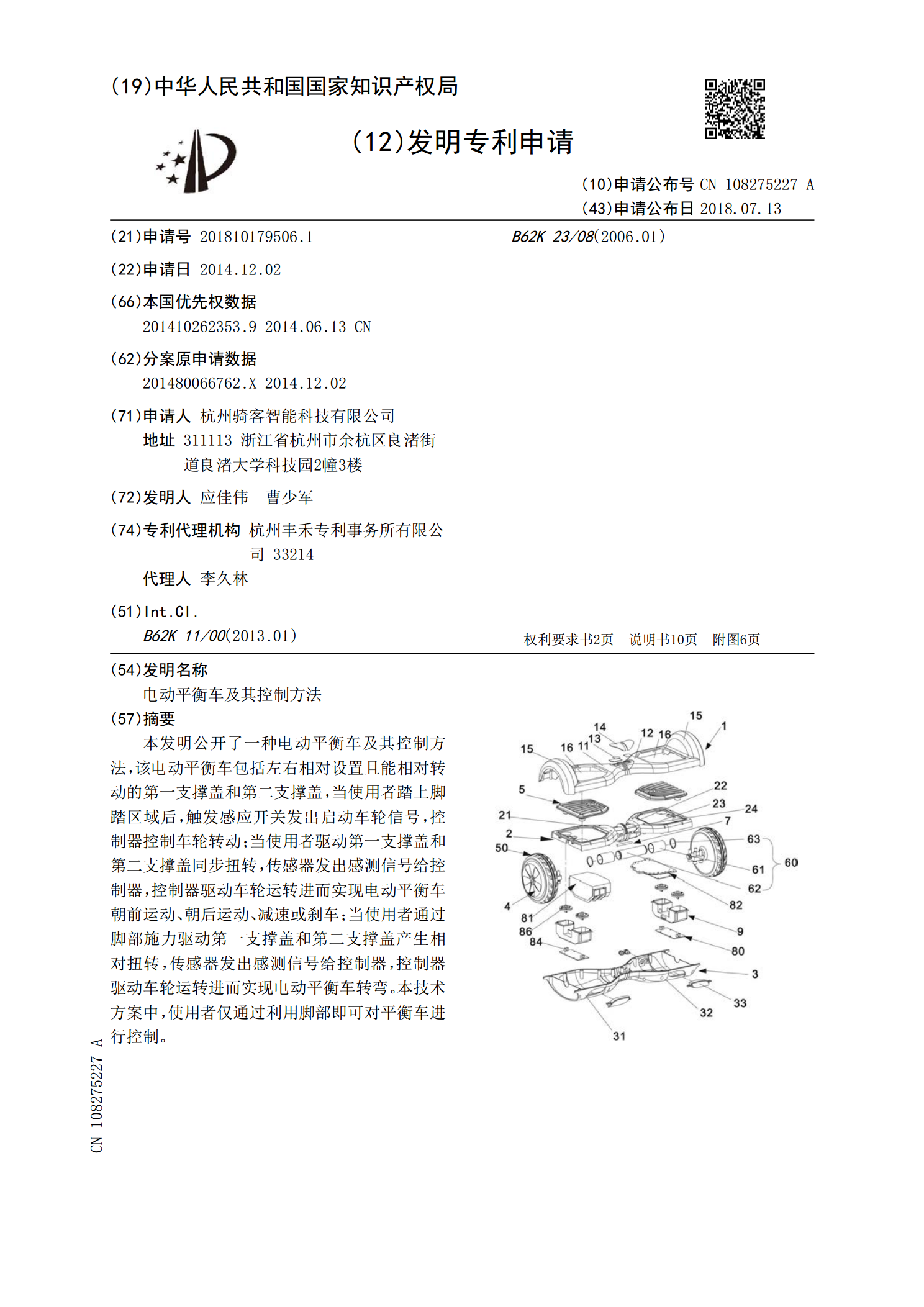
本发明公开了一种电动平衡车及其控制方法,该电动平衡车包括左右相对设置且能相对转动的第一支撑盖和第二支撑盖,当使用者踏上脚踏区域后,触发感应开关发出启动车轮信号,控制器控制车轮转动;当使用者驱动第一支撑盖和第二支撑盖同步扭转,传感器发出感测信号给控制器,控制器驱动车轮运转进而实现电动平衡车朝前运动、朝后运动、减速或刹车;当使用者通过脚部施力驱动第一支撑盖和第二支撑盖产生相对扭转,传感器发出感测信号给控制器,控制器驱动车轮运转进而实现电动平衡车转弯。本技术方案中,使用者仅通过利用脚部即可对平衡车进行控制。
电动平衡车及其转向控制方法.pdf
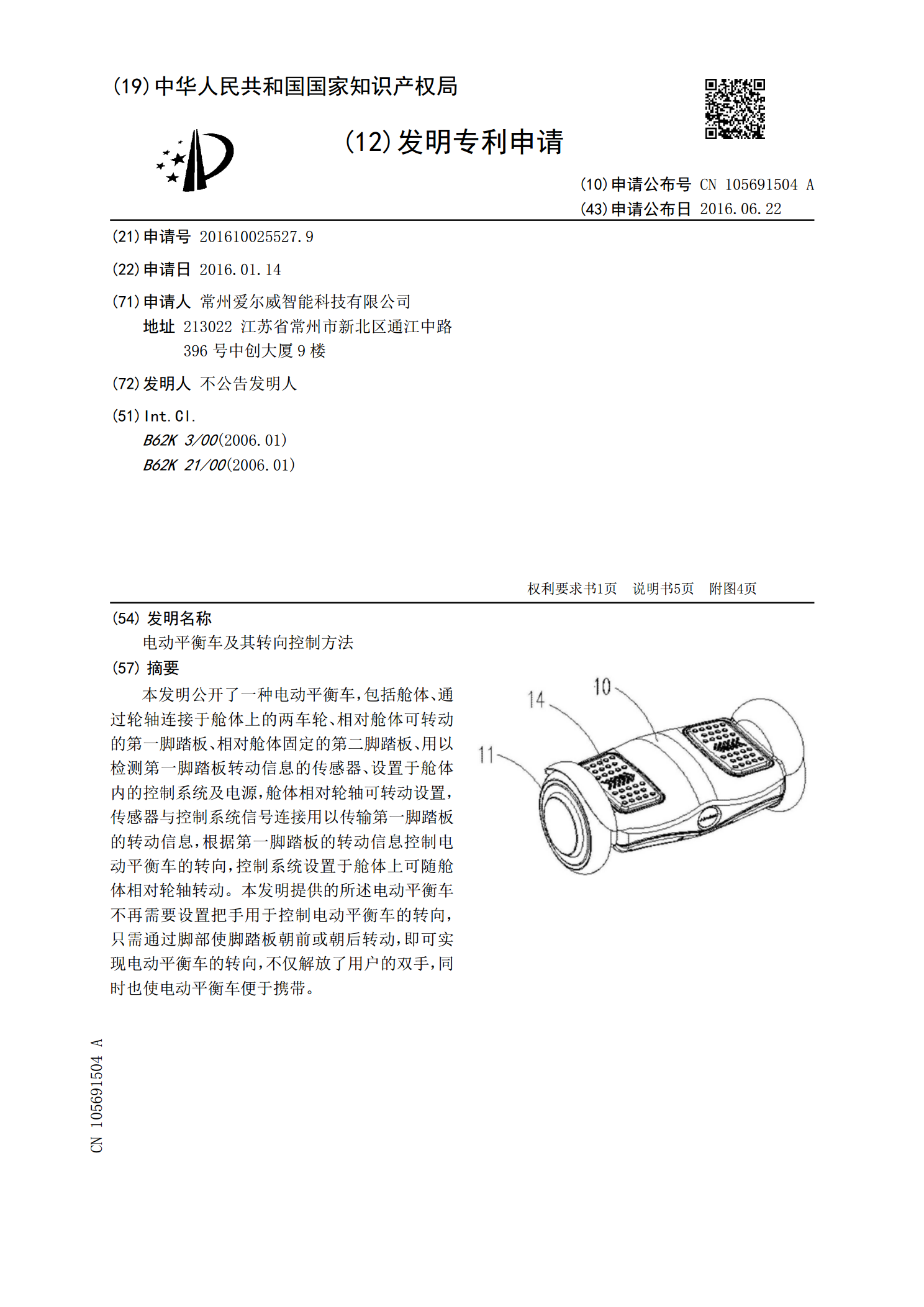
本发明公开了一种电动平衡车,包括舱体、通过轮轴连接于舱体上的两车轮、相对舱体可转动的第一脚踏板、相对舱体固定的第二脚踏板、用以检测第一脚踏板转动信息的传感器、设置于舱体内的控制系统及电源,舱体相对轮轴可转动设置,传感器与控制系统信号连接用以传输第一脚踏板的转动信息,根据第一脚踏板的转动信息控制电动平衡车的转向,控制系统设置于舱体上可随舱体相对轮轴转动。本发明提供的所述电动平衡车不再需要设置把手用于控制电动平衡车的转向,只需通过脚部使脚踏板朝前或朝后转动,即可实现电动平衡车的转向,不仅解放了用户的双手,同时

电动平衡车及其转向控制方法.pdf
本发明公开了一种电动平衡车,包括舱体、以及位于舱体两侧的车轮;舱体的内部设置有控制系统以及为车轮提供能源的电源,舱体上设置有供用户踩踏的脚踏板;脚踏板的下方设置有用于检测用户是否踩踏在脚踏板上且与控制系统信号连接的检测装置,脚踏板或脚踏板下方设置有用于检测用户脚部的活动信息并反馈给控制系统进而控制电动平衡车转向的测距传感器。本发明提供的电动平衡车,转向操控更方便;此外无需设置扭转机构,也简化了电动平衡车的结构。
两轮平衡车复位装置及采用该装置的自平衡电动车.pdf
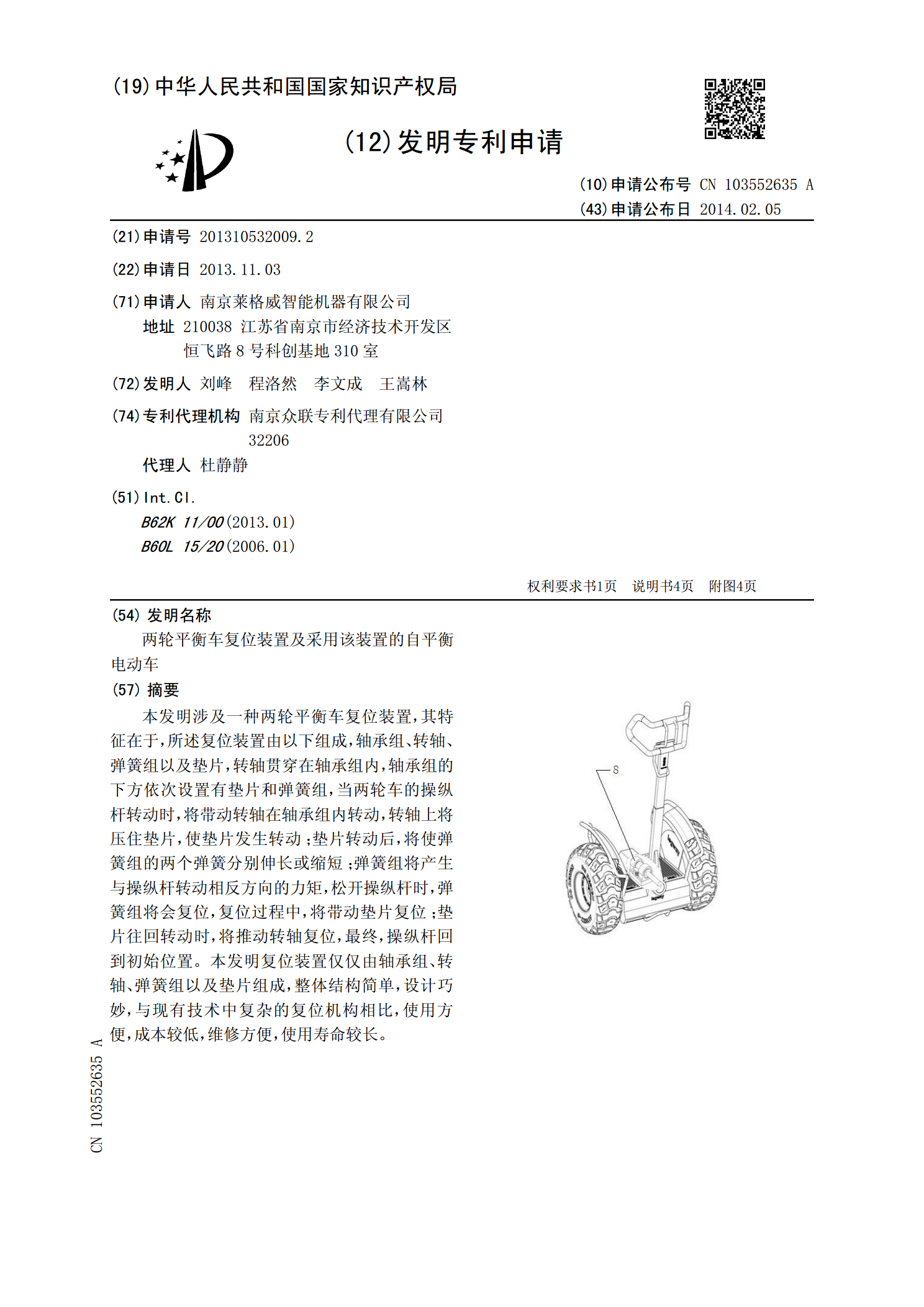
本发明涉及一种两轮平衡车复位装置,其特征在于,所述复位装置由以下组成,轴承组、转轴、弹簧组以及垫片,转轴贯穿在轴承组内,轴承组的下方依次设置有垫片和弹簧组,当两轮车的操纵杆转动时,将带动转轴在轴承组内转动,转轴上将压住垫片,使垫片发生转动;垫片转动后,将使弹簧组的两个弹簧分别伸长或缩短;弹簧组将产生与操纵杆转动相反方向的力矩,松开操纵杆时,弹簧组将会复位,复位过程中,将带动垫片复位;垫片往回转动时,将推动转轴复位,最终,操纵杆回到初始位置。本发明复位装置仅仅由轴承组、转轴、弹簧组以及垫片组成,整体结构简单