
一种三自由度同轴输出机构.pdf

书生****22

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种三自由度同轴输出机构.pdf
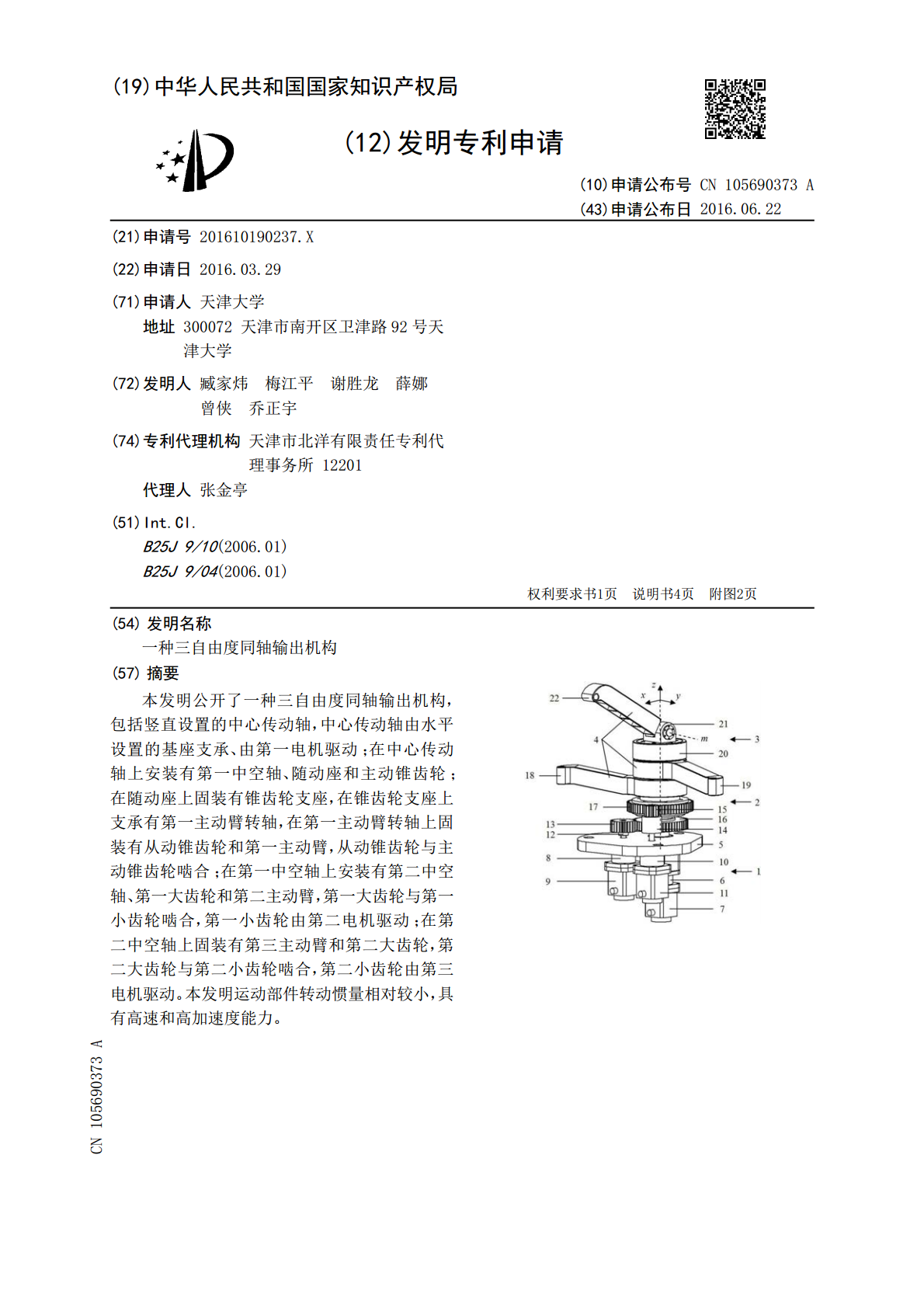
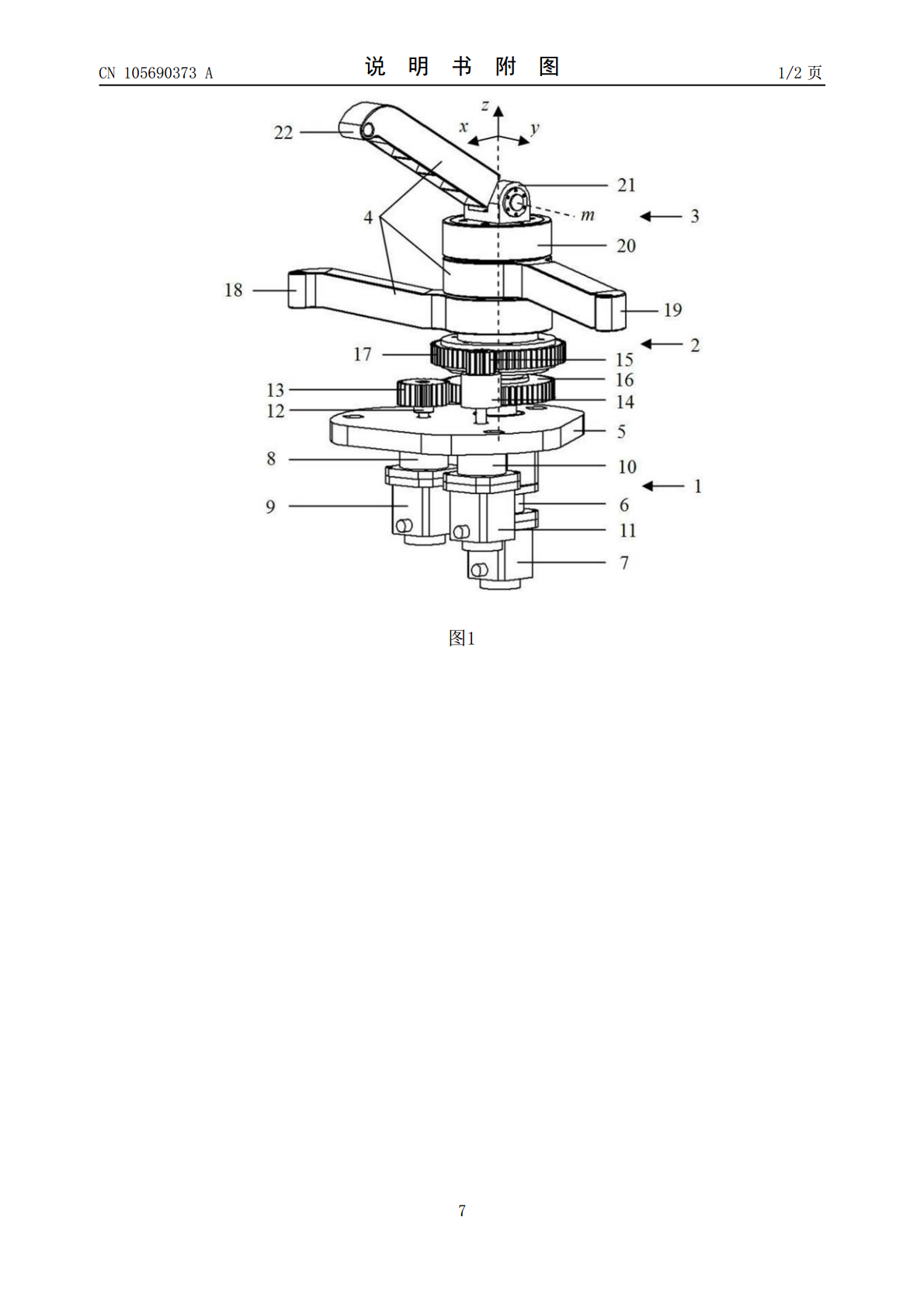
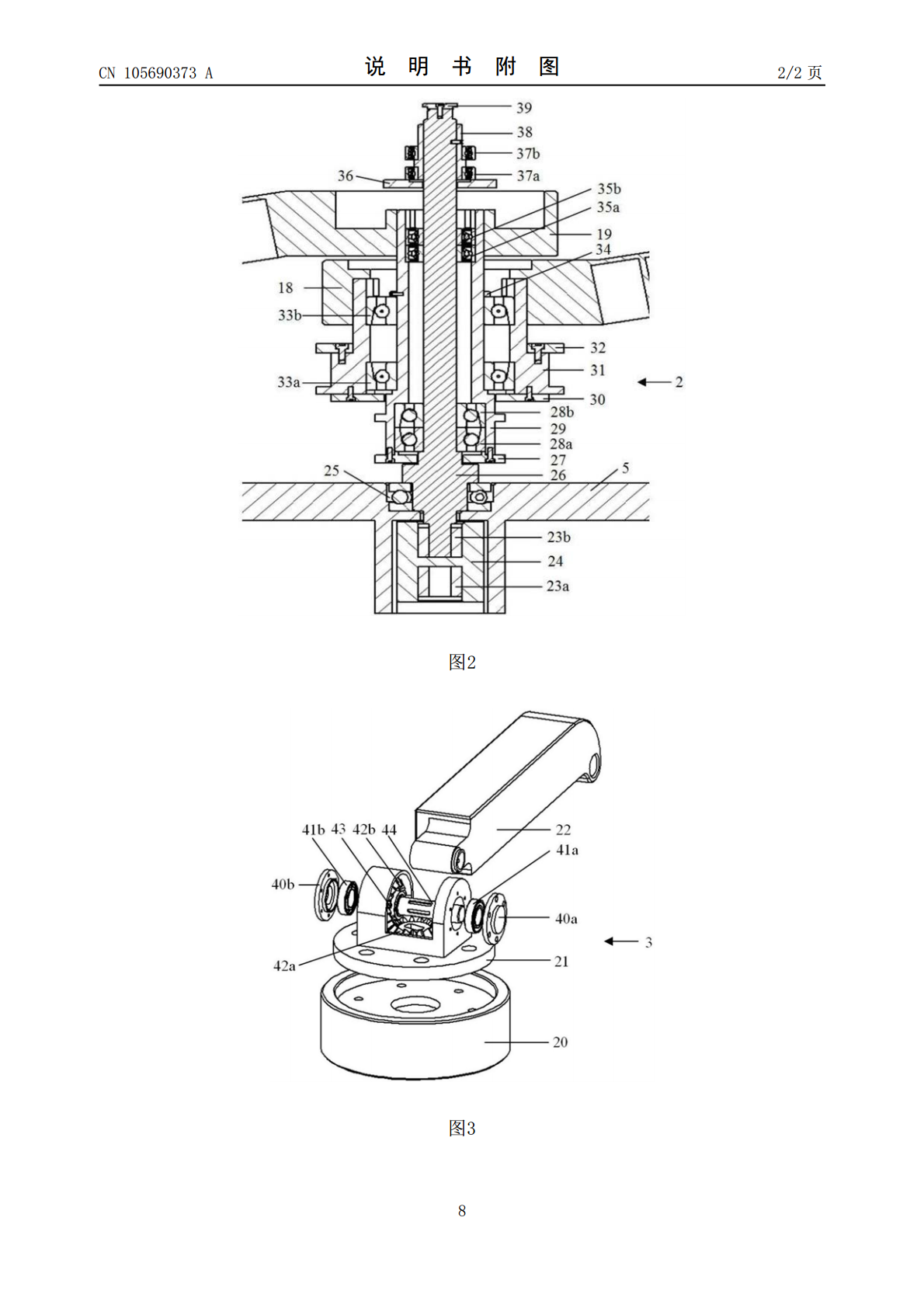
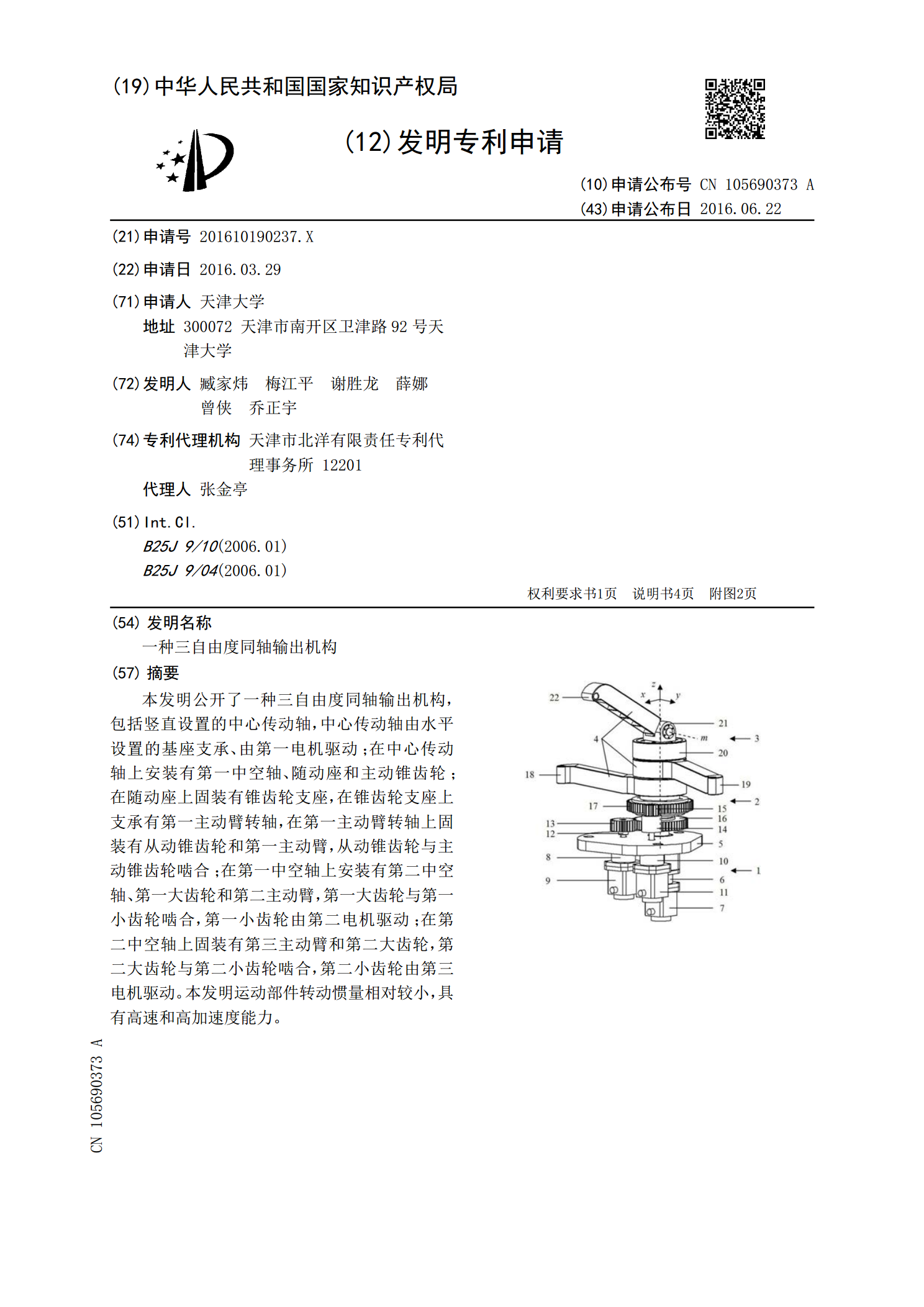
本发明公开了一种三自由度同轴输出机构,包括竖直设置的中心传动轴,中心传动轴由水平设置的基座支承、由第一电机驱动;在中心传动轴上安装有第一中空轴、随动座和主动锥齿轮;在随动座上固装有锥齿轮支座,在锥齿轮支座上支承有第一主动臂转轴,在第一主动臂转轴上固装有从动锥齿轮和第一主动臂,从动锥齿轮与主动锥齿轮啮合;在第一中空轴上安装有第二中空轴、第一大齿轮和第二主动臂,第一大齿轮与第一小齿轮啮合,第一小齿轮由第二电机驱动;在第二中空轴上固装有第三主动臂和第二大齿轮,第二大齿轮与第二小齿轮啮合,第二小齿轮由第三电机驱动
一种四自由度同轴输出机构.pdf
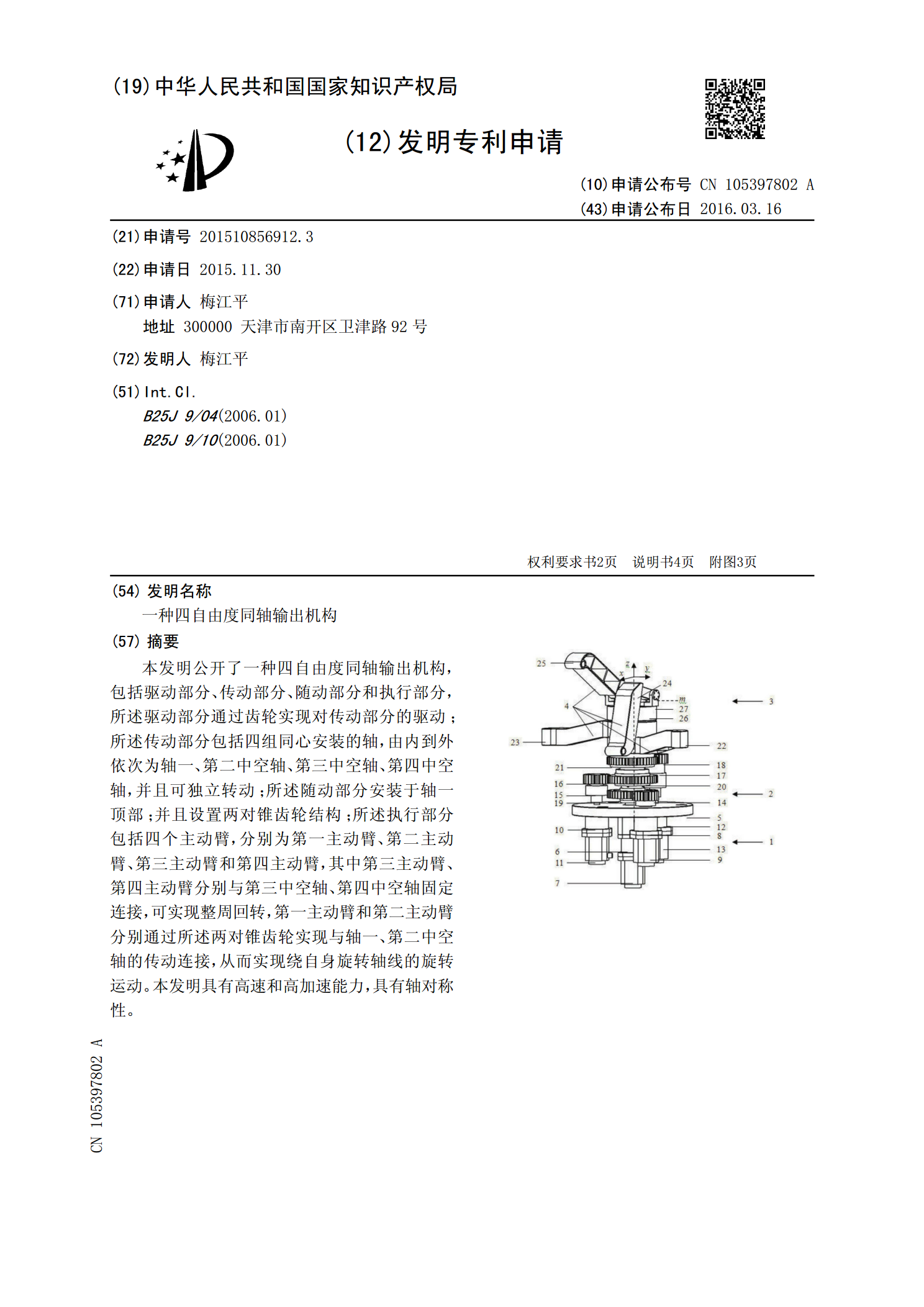
本发明公开了一种四自由度同轴输出机构,包括驱动部分、传动部分、随动部分和执行部分,所述驱动部分通过齿轮实现对传动部分的驱动;所述传动部分包括四组同心安装的轴,由内到外依次为轴一、第二中空轴、第三中空轴、第四中空轴,并且可独立转动;所述随动部分安装于轴一顶部;并且设置两对锥齿轮结构;所述执行部分包括四个主动臂,分别为第一主动臂、第二主动臂、第三主动臂和第四主动臂,其中第三主动臂、第四主动臂分别与第三中空轴、第四中空轴固定连接,可实现整周回转,第一主动臂和第二主动臂分别通过所述两对锥齿轮实现与轴一、第二中空轴
一种含丝传动的三自由度同轴输出机构.pdf
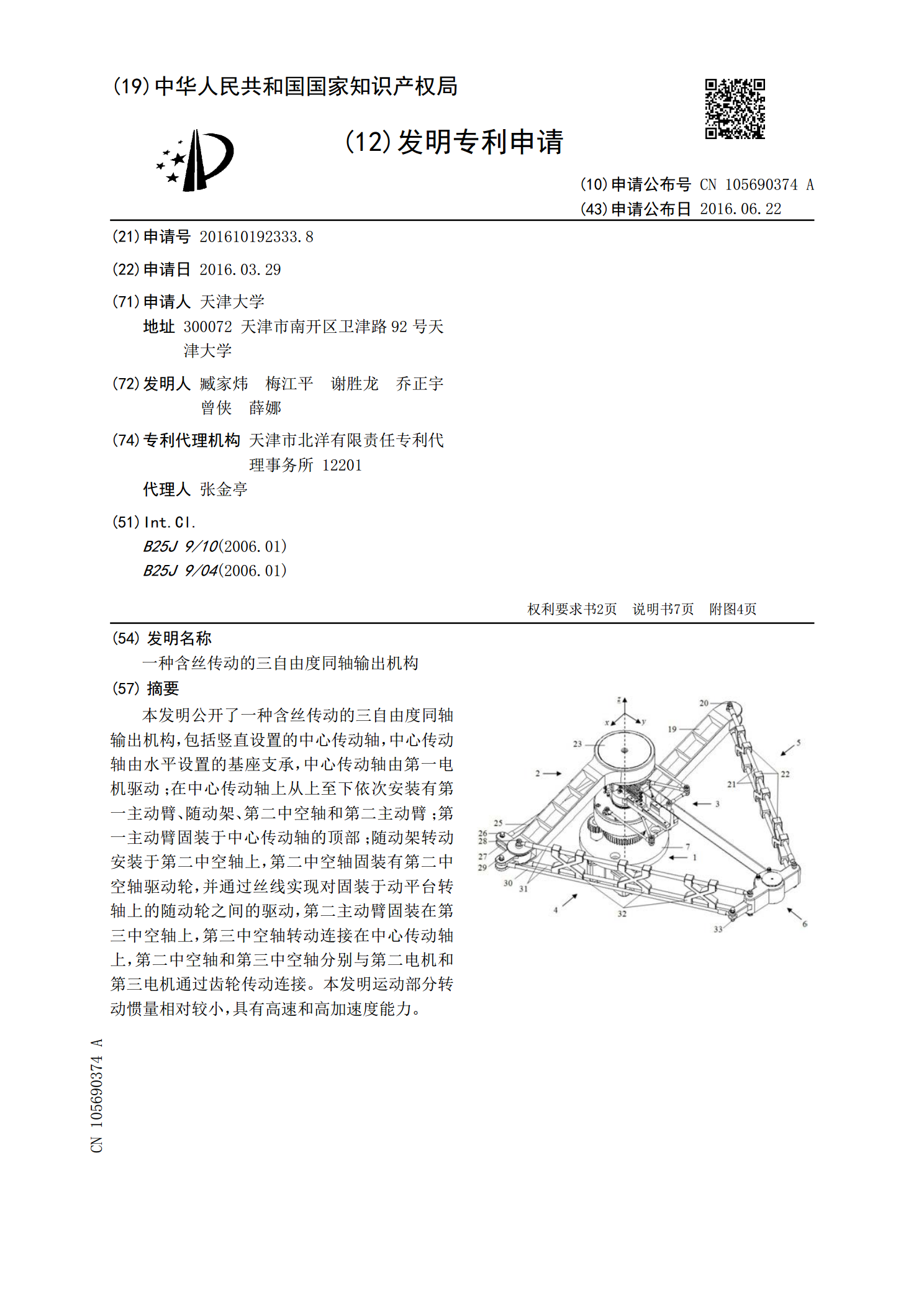
本发明公开了一种含丝传动的三自由度同轴输出机构,包括竖直设置的中心传动轴,中心传动轴由水平设置的基座支承,中心传动轴由第一电机驱动;在中心传动轴上从上至下依次安装有第一主动臂、随动架、第二中空轴和第二主动臂;第一主动臂固装于中心传动轴的顶部;随动架转动安装于第二中空轴上,第二中空轴固装有第二中空轴驱动轮,并通过丝线实现对固装于动平台转轴上的随动轮之间的驱动,第二主动臂固装在第三中空轴上,第三中空轴转动连接在中心传动轴上,第二中空轴和第三中空轴分别与第二电机和第三电机通过齿轮传动连接。本发明运动部分转动惯量
一种同轴双输出传动机构.pdf
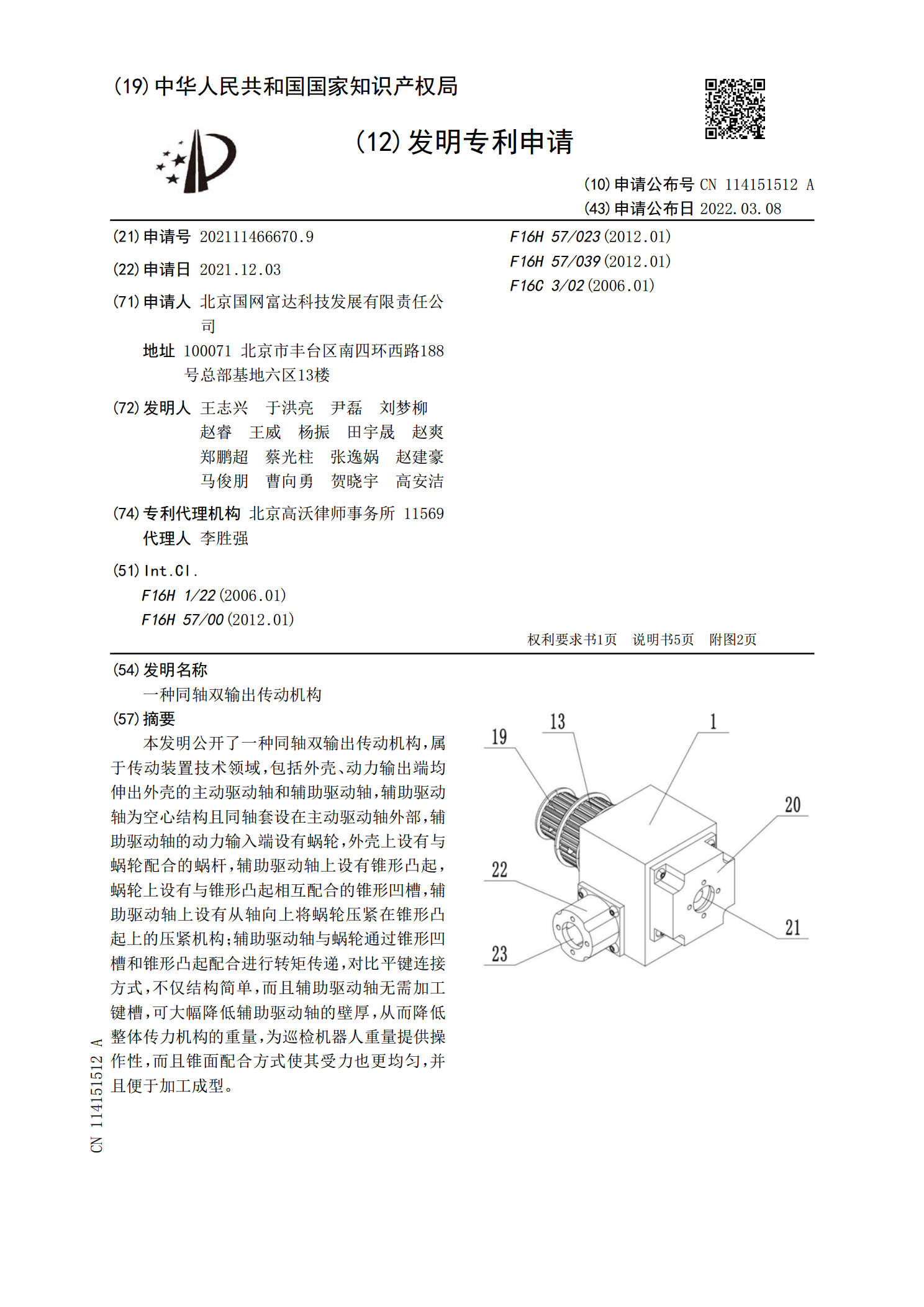
本实用新型公开了一种同轴双输出传动机构,属于传动装置技术领域,包括外壳、动力输出端均伸出外壳的主动驱动轴和辅助驱动轴,辅助驱动轴为空心结构且同轴套设在主动驱动轴外部,辅助驱动轴的动力输入端设有蜗轮,外壳上设有与蜗轮配合的蜗杆,辅助驱动轴上设有锥形凸起,蜗轮上设有与锥形凸起相互配合的锥形凹槽,辅助驱动轴上设有从轴向上将蜗轮压紧在锥形凸起上的压紧机构;辅助驱动轴与蜗轮通过锥形凹槽和锥形凸起配合进行转矩传递,对比平键连接方式,不仅结构简单,而且辅助驱动轴无需加工键槽,可大幅降低辅助驱动轴的壁厚,从而降低整体传力
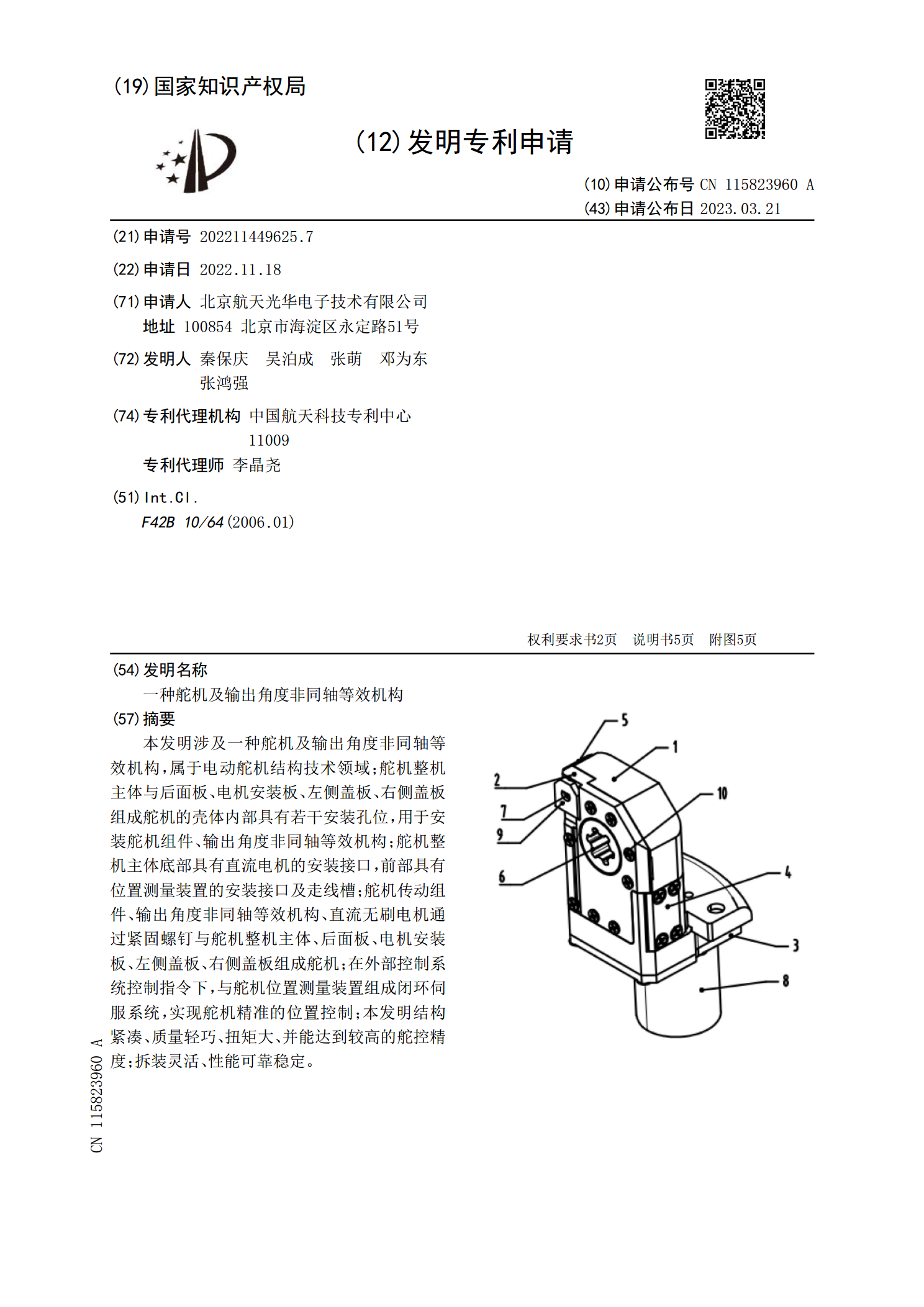
一种舵机及输出角度非同轴等效机构.pdf
本发明涉及一种舵机及输出角度非同轴等效机构,属于电动舵机结构技术领域;舵机整机主体与后面板、电机安装板、左侧盖板、右侧盖板组成舵机的壳体内部具有若干安装孔位,用于安装舵机组件、输出角度非同轴等效机构;舵机整机主体底部具有直流电机的安装接口,前部具有位置测量装置的安装接口及走线槽;舵机传动组件、输出角度非同轴等效机构、直流无刷电机通过紧固螺钉与舵机整机主体、后面板、电机安装板、左侧盖板、右侧盖板组成舵机;在外部控制系统控制指令下,与舵机位置测量装置组成闭环伺服系统,实现舵机精准的位置控制;本发明结构紧凑、质